三角计算和BACF 跟踪算法的无人机距离和高度计算方法
2022-10-20 01:09沈美丽张睿
电子器件 2022年3期
沈美丽,张睿
(青岛理工大学理学院,山东 青岛 266520)
随着无人机在军用及民用领域的快速推广和应用,加大对无人机的法律法规监管、加快无人机反制技术的研发已经迫在眉睫[1]。在反无人机探测跟踪技术中,视觉技术拥有目标可视化、可主动跟踪的优势,能够弥补雷达不能有效辨识目标的缺陷。由于无人机在图像中成像像素少,特征获取困难,且在无人机远近飞行过程中存在的尺度变换等问题,对跟踪的准确性和鲁棒性要求较高,因此针对远距离无人机等弱小目标的高度与距离测量是一个比较困难的问题。
现有的视觉测量主要包括单目、双目与结构光视觉测量等。其中,结构光由于光源的限制,应用的场合比较固定;双目视觉难点在于特征点的匹配,并且在三维场景[1]投影为二维图像的过程中存在着畸变、噪声,导致图像深度和不可见部分的信息丢失情况,影响了测量的精度和效率;单目视觉结构简单、成本低,系统工作量小且运算速度快[2],本系统设计采用单目视觉进行测距。
当前的单目视觉测距按照测量的原理主要分为基于已知物体的测量方法[3-4]和基于已知运动的测量方法[5-8]。基于已知物体的测量方法是指在已知物体信息以及摄像机内外参数的条件下利用摄像机获取目标图像并得到深度信息;基于已知运动的测量方法是指利用摄像机的参数与移动信息结合摄像机拍摄的图像信息测得目标的距离信息。根据本文所设计系统的应用场景选择前一种测距方法。
1 数学模型
基于三角计算关系的测高测距算法[16-17]采用单幅图像,在已知目标物体的实际尺寸值情况下,根据摄像机的焦距、俯仰角参数和搭建的平台高度并结合目标跟踪算法返回的目标跟踪框大小来估算深度信息。整个过程分为两步,获取跟踪框及距离估计。下面将对算法原理进行具体介绍。
1.1 基于三角计算的测高测距原理
根据实际情况,在测距测高[18-19]过程中主要分为两种情况,即摄像头水平放置与摄像头倾斜放置。第一种摄像头水平放置情况的原理图如图1 所示。
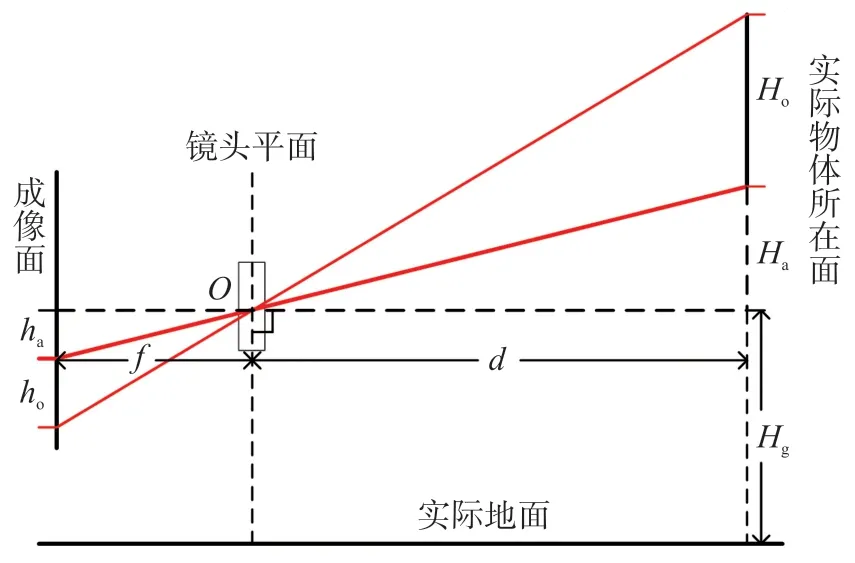
图1 摄像头水平放置测高测距原理图
图1 中,镜头平面与实际地面垂直,摄像机放置于距离地面Hg处,f为摄像机的焦距,O为镜头光心,目标经过相机的光心成像于像平面上,假设实际目标所在平面与相机平面的距离为d,目标的实际高度为Ho,在成像面上的高度为ho,目标下沿距离摄像机放置的水平面的垂直高度为Ha,对应成像面中目标距离中心坐标的高度ha。根据三角形计算原理,存在以下关系:
在实际检测前,需要对摄像机进行标定,即在待检测目标已知实际尺寸Ho、距离d的情况下,测试出准确的f值。在使用变焦镜头的情况下,需要对不同倍的焦距进行多次标定。即:

得到摄像机的焦距f后,可通过在成像面上的高度为ho计算得出目标的水平距离:

并可进一步求得目标距摄像机水平面的高度Ha,可求得目标的实际高度H:

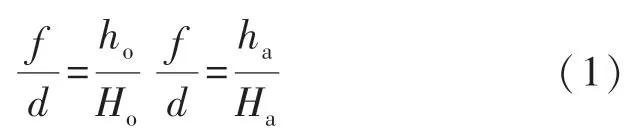
第二种摄像头倾斜放置情况的原理图如图2所示。
图2 摄像头倾斜放置测高测距原理图
在倾斜放置的情况下,摄像机与水平面的仰视角度为α,成像面、镜头所在平面与摄像机观察的实际物体所在面均相对垂直面倾斜相同角度α,实际物体尺寸Ho位于垂直面,但摄像机仰视观察时认为物体尺寸为,其对应关系为:


物体实际高度为:

可知,摄像机水平放置时即α=0,是摄像机仰视放置的一个特例。目标高度的显示值为整个物体的中心点与整幅视频图像中心点的上下距离比较,是相对镜头画面中点的相对值,不是相对地面的绝对高度值。
1.2 结合背景感知相关滤波器的测高测距算法实现
将1.1 算法原理与Galoogahi 等人于2017 年提出的一种用于视觉跟踪的学习性背景感知相关滤波器背景感知相关滤波器,即BACF(Background-Aware Correlation Filters) 跟踪算法[9-10]相结合。BACF 跟踪算法速度较快,可达到35.3 frame/s,将背景信息作为负样本进行更新,减轻了边界效应,成功率较高且具有较好的尺度变换功能,在一定范围内能够对运动目标进行较好的跟踪,当运动目标移动过快,移出检测框时则会丢失目标。结合后算法整体流程如图3 所示。
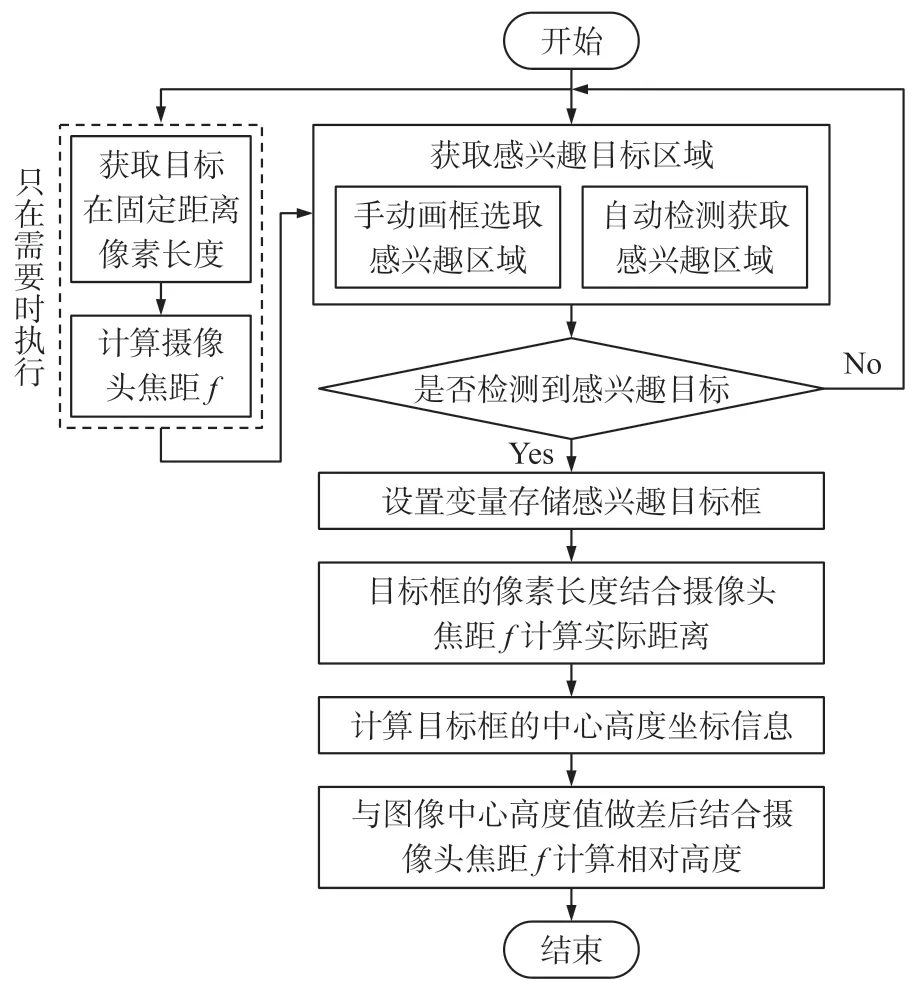
图3 测高测距算法流程图
2 实验结果
2.1 定性分析
本文实现了在对无人机目标进行跟踪的同时评估出目标距离摄像头的高度与距离的功能,使用大疆精灵2 无人机录制远近距离视频进行跟踪、测高测距实验。其中近距离视频可对实际距离进行测量,可分析准确度,远距离视频因实际距离难以测量,因此只能对跟踪与测距的效果进行一个较为直观的判断,无法进行具体的分析。实验测试采用3段视频,分别是近距离尺度变换视频(图4 和图5)、远距离尺度变换视频(图6)、田间飞行视频(图7)。
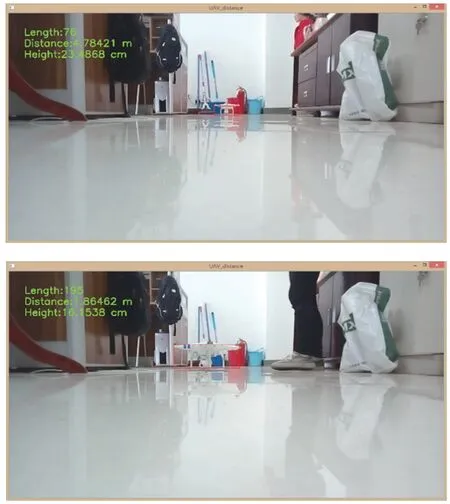
图4 无人机近距离尺度变换视频手动画框效果图
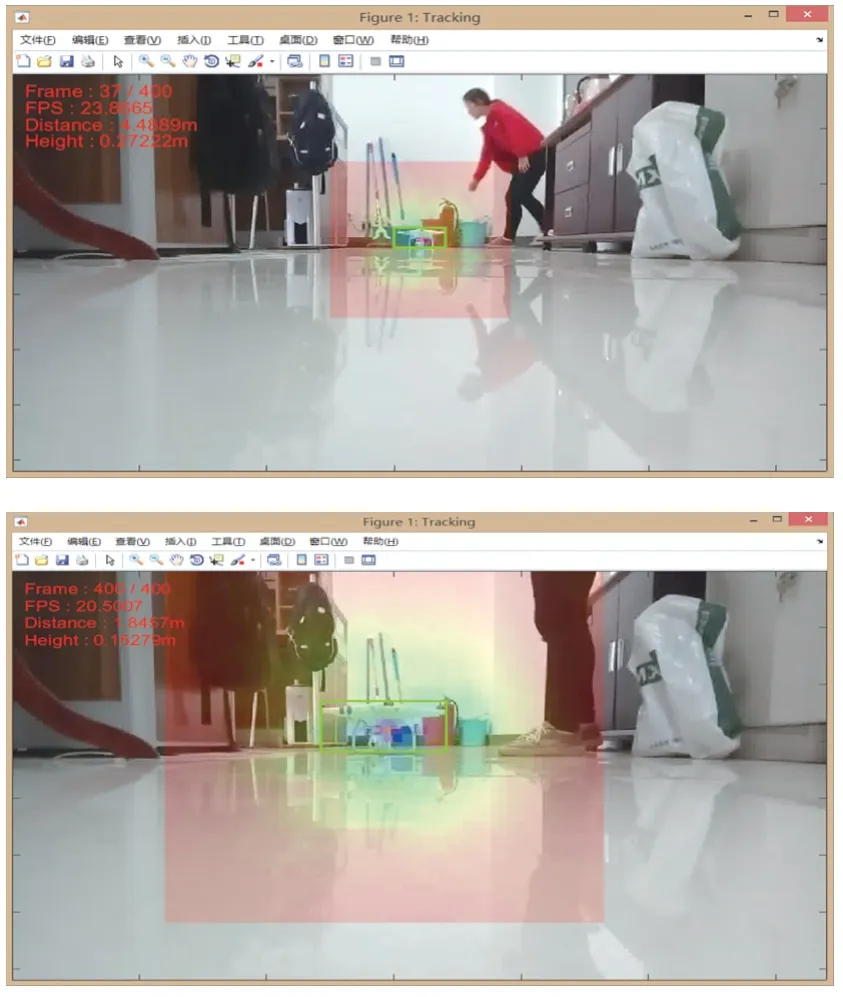
图5 无人机近距离尺度变换视频自动跟踪效果图
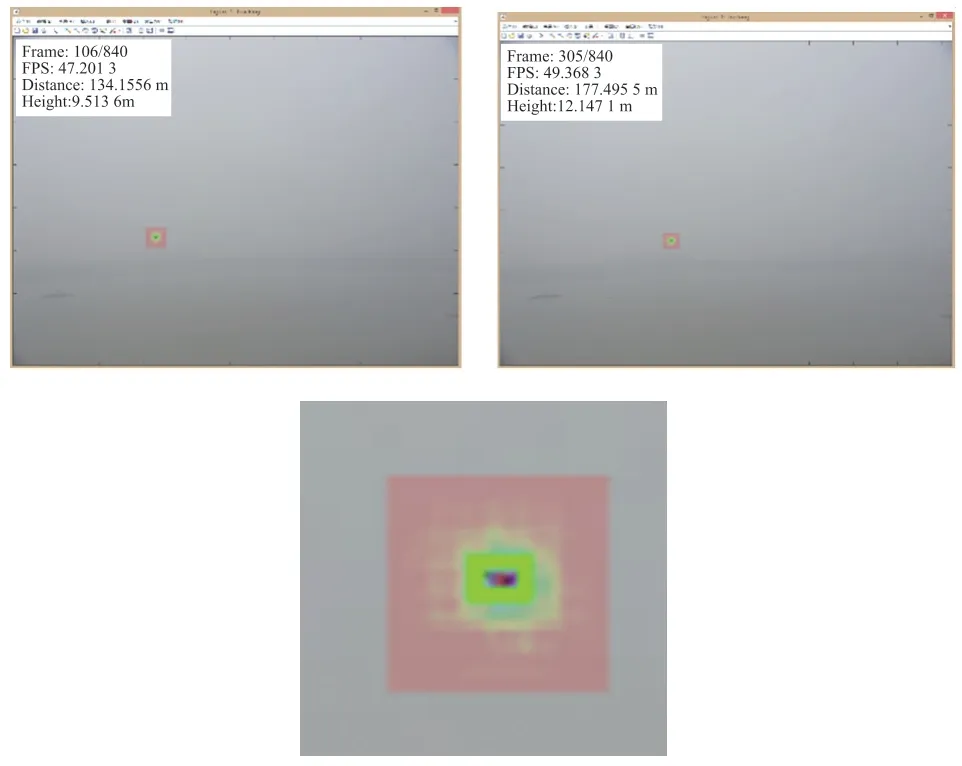
图6 无人机远距离尺度变换视频效果图

图7 无人机田间飞行视频效果图
该近距离视频采用手机摄像头录制,对焦距重新进行计算后选用摄像头焦距为1 038.857 1 mm。在无人机近距离尺度变换视频中,自动跟踪时能够实现无人机由远及近时目标框跟随目标物体运动且随着目标尺寸的变化而变化,在一定距离范围内结果与手动划取目标框的结果相近,跟踪效果以及尺度变换效果较好,但距离较远时误差较大。
因远距离视频中无人机目标较小,摄像头在拍摄过程中对焦距进行调整,如图6 所示(目标位于长方形框的中心)。在程序中,焦距参数调整为原参数的10 倍。该视频共840 帧,截取了106 帧、305帧、505 帧和702 帧进行观察,在视频运行过程中,无人机目标一直在向远离摄像头的方向移动。具体估测数据如表1 所示。

表1 无人机远距离尺度变换视频数据显示
可见该算法的帧率大约在48 frame/s 左右,随着无人机由近及远的运动中,目标尺寸逐渐减小,跟踪算法的尺度变换效果较好,距离由137 m 逐渐变化到251 m。
田间飞行视频中无人机目标较大,可以清晰地看到无人机目标的远近距离移动,视频中无人机反复进行远近移动,尺度变化明显。
2.2 定量分析
近距离视频可以确定真实值,可以对录制的无人机近距离尺度变换视频的测高测距算法进行准确度评价,视频为静态无人机的定点录制视频,从4.8 m 到1.2 m,每次移动0.6 m 进行测试,一组共记录7 组数据,分别对手动画框、自动跟踪画框进行准确度测试,通过相对误差来反映算法的准确度,相对误差等于真实值与测试值的差值除以真实值,分析数据如表2 所示。
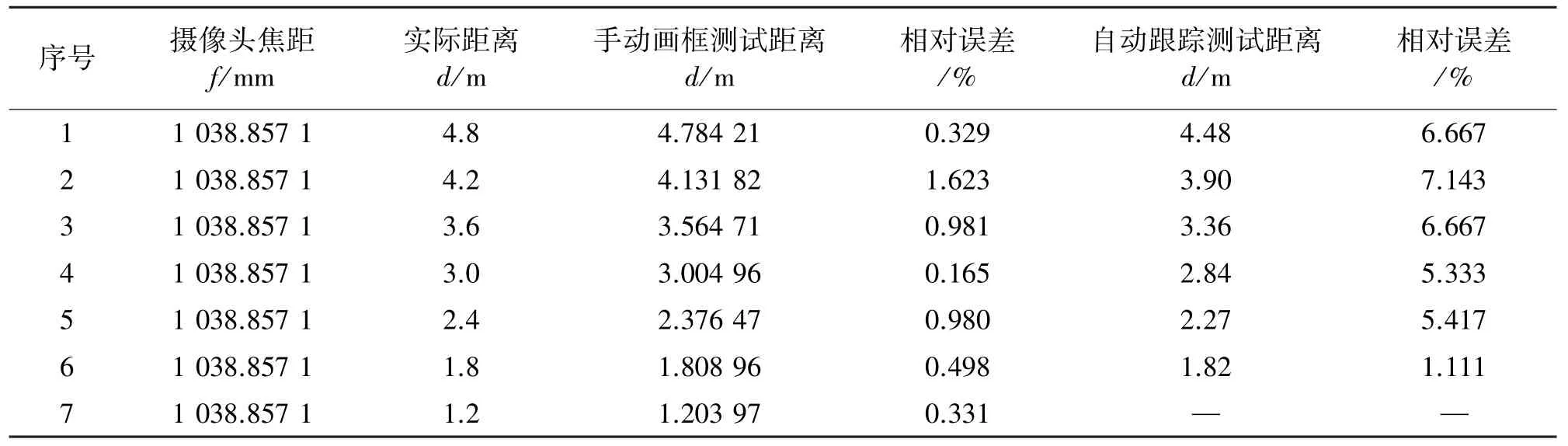
表2 无人机近距离视频手动画框与自动跟踪框相对误差
由表2 可知,使用手动画框进行测距时,相对误差很小,距离显示基本是准确的。在记录数据过程中,因视频录制过程中跟踪框会自行调整,因此数据持续变动,仅记录了每个时刻的大致数值,小数点后保留两位。结合跟踪算法自动对目标进行跟踪画框时,随着距离的靠近误差在逐渐减小。相对于手动画框而言,相对误差增大了约5%。跟踪算法在尺度变化时的准确度对测距结果影响较大。直观数据如图8。
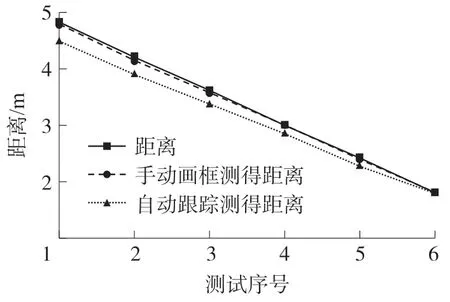
图8 无人机近距离视频手动画框与自动跟踪框准确度比较
3 结论
提出了针对特定无人机目标的基于三角计算的测高测距算法,在已知目标实际大小,摄像头焦距、俯仰角等参数的情况下,将相似三角形原理与BACF 算法相结合,实现了对无人机目标进行跟踪的同时评估出目标距离摄像头的高度与距离。由实验结果可知,该算法可对无人机目标进行有效跟踪并评估其距离,平均相对误差为5%。另外,高度的测量是利用目标的中心坐标点相对整幅图像中心的高度值或相对整幅图像下沿的高度值,不具有很好的实际意义。
算法在锁定目标并进行跟踪后,可实时判断出目标相对摄像头的高度与距离,可为后续的反制措施提供有效的位置信息,在接近敏感区域时能及时预警,对于确保重要人员、场所的安全具有重要意义。所提算法除可应用于反无人机光电模块中的跟踪与检测步骤外,还可推广应用于其他待追踪目标的距离评估中。
猜你喜欢
社会科学战线(2022年7期)2022-08-26
导航定位学报(2022年4期)2022-08-15
小猕猴智力画刊(2020年3期)2020-04-08
阅读(科学探秘)(2018年10期)2018-05-14
企业技术开发·下旬刊(2016年8期)2016-10-13
中国信息化周报(2015年1期)2015-04-09
时代英语·高三(2014年5期)2014-08-26
恋爱婚姻家庭·养生版(2014年6期)2014-08-15
雕塑(2000年2期)2000-06-22