
车辆底盘防动物藏匿报警装置
2022-10-20 02:28周存芳
时代汽车 2022年20期
周存芳
江苏联合学院苏州工业园区分院 江苏省苏州市 215123
1 技术背景
生活中,常常看到很多动物惨死在车轮底下的惨剧,使人不又感到惋惜,尤其对于动物主人而言更为心痛,也会因为动物被车辆误伤,而引起动物主人与车主之间的矛盾。
本装置是属于汽车安全领域的辅助智能控制系统,在汽车底盘下安装一个监测动物的装置,监测到底盘下有藏匿小动物后,能够提醒车主,引起注意,从而避免动物被误伤的惨剧发生。为此,提出车辆底盘防动物藏匿报警装置。
2 设备简介
本装置检测组件包括车辆、壳体、螺栓、固定耳、蓄电池、图像识别器、钢化玻璃罩、蜂鸣器和单目摄像头;升降组件包括高度传感器、限位杆、固定板、通孔、柱形通孔、气缸和控制器;车辆的底部一侧设有壳体,壳体的底部中心处设有单目摄像头,壳体的内部底壁一侧安装有图像识别器,单目摄像头的信号输出端通过导线与图像识别器的信号输入端信号连接,壳体的底部一侧安装有蜂鸣器,蜂鸣器的电性输入端通过导线与图像识别器的电性输出端电性连接。
壳体的内部底壁另一侧安装有蓄电池。壳体的外侧壁对称焊接有八个固定耳,八个所述固定耳的内部均螺纹连接有螺栓,壳体通过螺栓固定连接于车辆的底部一侧。壳体的下表面中心处开设有通孔,通孔的内部设有固定板,单目摄像头安装于固定板的下表面。固定板的下表面粘接有钢化玻璃罩。固定板的两侧对称开设有两个柱形通孔,两个所述柱形通孔的内部均设有限位杆,限位杆的两端分别焊接于壳体的内部顶壁和内部底壁。
壳体的内部顶壁中心处安装有气缸,气缸的活塞杆焊接于固定板的上表面。壳体的下表面一侧安装有高度传感器,壳体的内部顶壁安装有控制器,控制器的信号输入端通过导线与高度传感器的信号输出端信号连接。如图1。
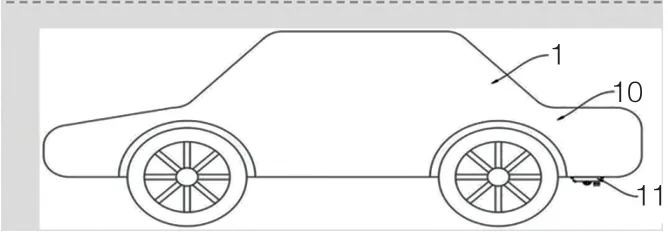
图1 车辆底盘防动物藏匿报警装置结构图
3 工作原理
通过螺栓和固定耳将本装置固定在车辆的底部一侧,当车辆底部出现小动物后,单目摄像头拍摄汽车危险部位的影像,然后将信号发送到图像识别器的内部,通过图像识别器将单目摄像头拍摄的影像进行分析与处理,如果发现小动物的影像,就会将信号发送到车辆内部的显示器上面,提醒人们车辆底部出现小动物,然后蜂鸣器发出警报,通过蜂鸣器发出刺耳的声响,可以将小动物进行驱赶,图像识别器采用Jetson nano模块,Jetson nano 模块是汽车危险部位防动物藏匿报警装置电路的核心,在模块内部预先烧录好ubuntu 系统,搭建好环境,通过python 语言编写程序,利用opencv 及一些库,实现特征算法的抓取,从而实现摄像头探测到小动物后,程序识别到小动物存在并执行蜂鸣器占空比50%鸣叫的结果,当车辆进行行驶时,路面会有高低不同的情况出现,此时,通过高度传感器对路面的高度进行监测,当路面出现坑洼或减速带时,高度传感器将信号发送到控制器的内部,然后通过控制器启动气缸,气缸活塞杆的移动带动固定板进行移动,从而将单目摄像头收入壳体的内部,避免了单目摄像头受到损坏的情况出现,本装置提供了车辆底盘防动物藏匿报警装置,避免了因驾驶员的忽视,未发现小动物在汽车危险部位藏匿,而急于启动汽车,从而导致小动物被驾驶员误伤到的惨剧。
4 实施方法
为了解决上述技术要求,创新作品中在技术方案方面作了以下设计:
1.考虑到图像识别牵涉到很复杂的算法,如采用飞思卡尔等单片机,实现动物识别,程序将会非常复杂与繁冗,因此采用Jetson nano 模块进行图像识别的算法处理。
2.因为无头连接模式,需要利用电脑来连接Jetson nano 模块,所以采用显示器与Jetson nano 模块进行连接,并将识别的结果显示在显示器上。
3.采用Jetson nano 模块自带的蜂鸣器实现报警器,通过对蜂鸣器编写高低电平的控制程序,使蜂鸣器按照50% 占空比蜂鸣。
4.模块需烧录ubuntu 系统,采用python 高级语言进行程序编写,代码可比C 语言略简短一些。
5.采用OpenCV 进行图像算法的处理,使复杂图像的识别更加准确一些。
6.采用8V 直流电源向Jetson nano模块供电。
本产品实际效果:提供了车辆底盘防动物藏匿报警装置,避免了因驾驶员的忽视,未发现小猫等小动物在汽车危险部位藏匿,而急于起动车辆,从而导致小动物被驾驶员误伤到的惨剧。
本产品由单目摄像头、Jetson nano 模块、小型车载显示器、蜂鸣器、直流电源及充电器等部分组成一个完整的控制系统。如图2。
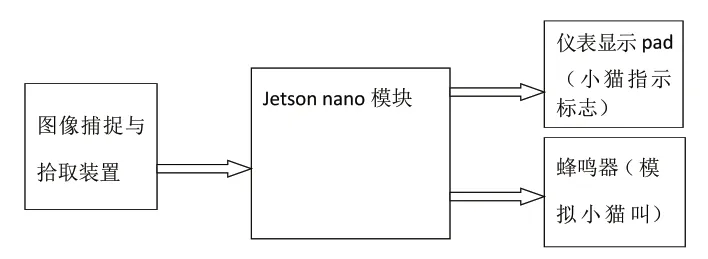
图2 车辆底盘防动物藏匿报警装置方框图
5 控制电路设计
1.“车辆底盘防动物藏匿报警装置”控制电路设计构思。
1)使用单目摄像头作为拾取小猫图像信号的传感器。单目摄像头检测距离较长、精确度较高,外形简洁,易于安装,价格较低。
2)采用Jetson nano 模块作为开发板,可实现复杂图像的识别。
3)采用Jetson nano 模块作为开发板,因其GPU 性能较强,因此运算速率较快,以便进行数据训练的时候,提高效率。
4)使用8V 直流电源,控制机理简单,体积小且便携。
5)附带充电器进行直流电源的充电,因此不必取下电池单独充电,可插着充电器运行系统(但不建议长期如此操作,除非开发程序的时候)。
6)该作品只是一种控制装置的结果实现,可安装在汽车上的多处小动物易藏匿的危险部位,因此产品本身设计后,将不安装在汽车的某一固定部位,车主可自行要求4S 维修店进行相应部位的安装。如图3。
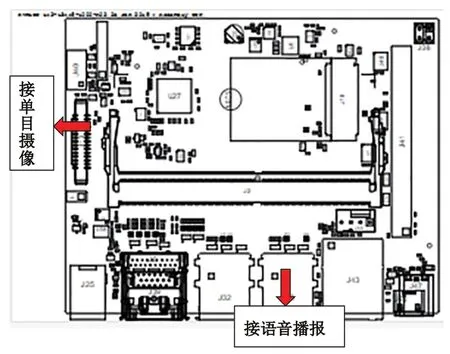
图3 Jetson nano 模块——电路图
2.控制电路设计中的元器件选择。
1)对百度API 接口进行合理选择。
2)对模块的供电电源进行选择。
3)对摄像头型号进行选择。
3.控制电路工作原理:
1)车辆底盘防动物藏匿报警装置,由单目摄像头、Jetson nano 模块、小型车载显示器、蜂鸣器、直流电源及充电器等部分组成。
2)单目摄像头是汽车危险部位防动物藏匿报警装置拾取小猫图像信号的传感器。相当于人类的眼睛,将拾取的图像信号输入到Jetson nano 模块,通过Jetson nano 模块内部的特征算法处理后,实现需要的结果。
3)Jetson nano 模块是汽车危险部位防动物藏匿报警装置电路的核心。在模块内部预先烧录好ubuntu 系统,搭建好环境,如python3.6、OpenCV、tensorflow、jupyterlab 等等,通过python 语言编写程序,利用opencv 及一些库,实现特征算法的抓取,从而实现摄像头探测到小猫后,程序识别到小猫存在并执行蜂鸣器占空比50% 鸣叫的结果。
4)显示屏是汽车危险部位防动物藏匿报警装置的输出设备,它用来显示小猫存在的信息,以提醒驾驶员注意。
5)蜂鸣器是汽车危险部位防动物藏匿报警装置的报警装置,其工作原理较简单,当Jetson nano 模块识别到摄像头里探到的小猫后,模块利用高低电平按照50% 占空比并设定固定的频率蜂鸣即可。
6)8V 的直流电源为“汽车危险部位防动物藏匿报警装置”提供稳定的直流电源。为了方便充电,采用了充电器直接充电的方式,无需拆下电池就能对直流电源充电。
4.“车辆底盘防动物藏匿报警装置”的安装
1)“车辆底盘防动物藏匿报警装置”的PCB 设计实物图。如图4。
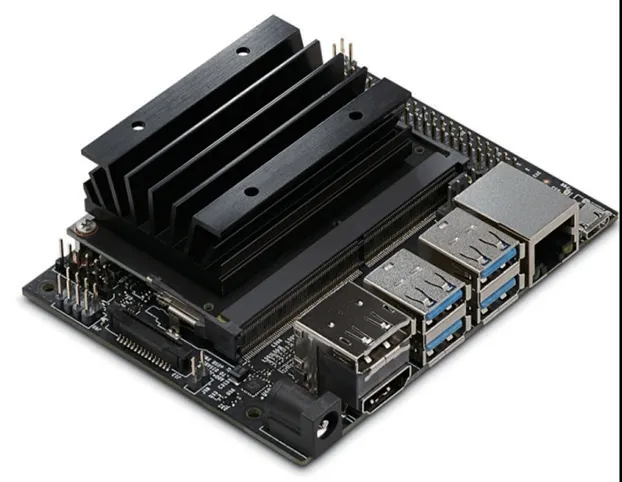
图4 车辆底盘防动物藏匿报警装置——PCB 板图
2)对元器件进行测量。
在安装之前,应对所有元器件进行调试及检测,以保证装调过程中减少不必要的故障的发生。
3)对整机电路与机械支架外壳等部件进行安装。
5.“车辆底盘防动物藏匿报警装置”的调试
Jetson nano 模块与机械外壳等部件装配结束后方可对设备进行调试,其目的:(1)检查各元器件是否完好。(2)Jetson nano 模块调试是否正常。(3)与外部元器件的连接与运行是否正常。(4)机械外壳部件是否牢靠,稳定。
1)万用表置20V 档位,测量8V 直流电池组是否正常。
2)万用表置200 欧姆电阻档位,测量摄像头数据线通断情况,应无断路。
6.“车辆底盘防动物藏匿报警装置”的总装
1)安装整个机械外壳部件。各个螺栓连接部位应该安装牢靠、可靠、无松动。
2)安装Jetson nano 模块。应当牢靠固定,无松动。
3)安装各输入输出设备。应当连接牢靠,无松动,无断路短路现象。
7.“车辆底盘防动物藏匿报警装置”的总调
使用直流电源,整个控制系统应工作正常,能正常实现该装置的功能。
6 产品优点
本产品通过检测组件可以对车辆底部的危险部位进行检测,避免了因驾驶员的忽视,未发现小猫等小动物在汽车危险部位藏匿,而急于启动车辆,从而导致小动物被驾驶员误伤到的惨剧。通过升降组件可以将单目摄像头收入壳体内部,避免了因为道路表面出现坑洼或减速带,导致单目摄像头受到碰撞,从而损坏无法正常使用的情况出现。
7 结语
本产品使用了Jetson nano 开发板作为开发平台,通过简单的单目摄像头,拾取汽车危险部位的小猫影像,如果识别到汽车危险部位存在小猫,发出报警声,该装置以opencv 为载体,采用python 语言进行程序编写,因 Jetson nano 处理图像的能力非常强,GPU 性能较高,所以可实现高效正确的识别结果。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
电子乐园·下旬刊(2022年5期)2022-05-13
电脑报(2020年12期)2020-06-30
少年文艺·开心阅读作文(2019年8期)2019-09-12
科技资讯(2016年8期)2016-05-14
科技创新导报(2016年5期)2016-05-14
中国信息技术教育(2014年15期)2014-09-27
人民交通(2009年2期)2009-03-04
