
拉线传感器变角度工作条件下的校准
2022-10-19 05:05崔岩梅李涛周宁欧阳海宁高战朋唐薇
计测技术 2022年4期
崔岩梅,李涛,周宁,欧阳海宁,高战朋,唐薇
(1.航空工业北京长城计量测试技术研究所,北京 100095;2.航空工业强度所,陕西 阎良 710089)
0 引言
拉线(绳)位移传感器(以下简称拉线传感器)是线位移传感器的一种,因其具有结构简单、使用方便、测量距离大、抗干扰能力强等优点,可测量距离、运动速度、感应位置等,广泛应用于运输、液压、气动、工业自动化、计量测试等行业。
拉线传感器多用于解决现场的实际测试问题,项华等人[1]对飞机操纵系统进行了地面静态试验和动态试验,用拉线传感器对驾驶杆、驾驶盘、脚蹬的偏转角进行了测量,该方法也可用于飞机升降舵、副翼、方向舵及其他操纵系统摇臂偏转角度的测量。龚成等人[2]构建了基于拉线位移传感器的测量系统模型,用于动态空间位置测量。焦新泉等人[3]也公布了一种利用拉线位移传感器构建测量系统的方法,解决了因烟尘问题或测试点处于不同介质等复杂环境时的空间测量问题。此外,拉线传感器在其他领域的测试应用也时有报道[4-7]。
飞机结构静强度试验是验证飞机结构性能是否满足适航条例要求的必不可少的试验项目,其试验特点是通过施加外部载荷的地面试验,模拟飞机在滑跑、起飞、巡航、机动以及降落过程中结构的受载情况,测量分析应变、变形等结构响应,验证飞机结构强度是否满足要求。机翼变形测量是结构静强度的重要试验内容之一。传统测试方法是采用多支拉线位移传感器分布在机翼关键部位,通过位移测量结果分析整个机翼的变形情况。外部载荷施加过程中,机翼发生空间变形,造成拉线传感器的使用角度偏转,现场测试中,需要快速确定角度偏转对拉线传感器位移测量误差[8]的影响,从而在现场进行快速的数据有效性判定,指导现场测试工作。
针对拉线传感器现场使用要求,根据拉线传感器的结构和工作原理,参考传统校准方法,提出基于正交安装方式的灵敏度系数校准方法,构建校准装置,再进行两维灵敏度系数的合成研究,最终形成灵敏度系数的正交误差模型,从而为现场试验变形测量的误差快速判定提供依据,指导现场试验。
1 工作原理
拉线传感器内部结构如图1(a)所示,由力平衡机构、轮毂、钢丝线(拉线)、传感元件、信号处理部件和信号输出线缆组成[9-10]。其中,钢丝线通过弹簧缠绕于轮毂上,钢丝线的拉动带动轮毂旋转,拉线的位移量转变为轮毂的旋转量;轮毂与一个精密传感元件共轴,传感元件可以是增量编码器、绝对(独立)编码器、混合或导电塑料旋转电位计、同步器或解析器,其将轮毂的旋转量转变为电信号,以电流、电压或数字脉冲形式由电缆输出,外接显示仪表。
使用时,位移传感器通过自身的安装孔固定,拉线端连接在待测物体上,待测物体运动轴线与位移传感器轮毂轴线垂直,且与拉线传感器安装的基准平面平行,于是拉线的位移量发生变化,可以由仪表读取,从而测得运动物体的位移、方向或速率。位移传感器有两种安装方式,横向安装(x向)和纵向(y向)安装,两种安装方式呈90°角,如图1(c)和图1(d)所示。

图1 拉线位移传感器结构示意图Fig.1 Pull wire displacement sensor structure schematic diagram
依据JJF 1305-2011《线位移传感器校准规范》[11],需要选择长度标准器作为传感器的位移输入,采用相应的二次仪表读取位移传感器的输出量:电压、电流、电阻、频率或频率模数,拉线传感器的校准状态,是拉线的直线运动与轮毂轴线垂直,且和移动物体运动轴线一致,传感器的安装尽量满足阿贝原则,且使用满足规程要求的高准确度测长设备作为长度标准器[12-15],在拉线传感器的量程范围内均匀取n(校准规范建议n≥11)个校准点,按顺序分别读出各校准点上的标准位移值和传感器输出值,采用最小二乘法求得拉线传感器的灵敏度。
2 静强度试验中的现场测试问题分析
静强度试验中,某型民用大飞机的翼展为35.8 m,翼尖距离机身中轴线为17.9 m。在力加载条件下,翼尖的变形量可达数米。为了监测机翼关键点的变形情况,现场试验中加装了多支拉线传感器,分布于机翼监测关键点。试验前,所用拉线传感器已根据1305-2011《线位移传感器校准规范》进行了校准,量程和测量准确度等指标均满足测试要求。
翼尖处拉线传感器的现场工作示意图如图2所示:拉线传感器的固定端固定在地面,拉绳端固定在机翼上,在机翼没有变形时安装在P1的位置,拉线与地面垂直。随着强度试验的进行,机翼开始变形,拉绳端的位置发生了变化,变动到了P2的位置,此时拉线长度和拉线方向均发生变化,产生了θ角度的偏转。随着偏转角度的增大,拉线传感器的使用状态与校准状态出现明显差异,需要重新进行使用状态下的误差测算。

图2 拉线传感器实际使用条件下的偏转示意图Fig.2 Deflection diagram of cable sensor in actual use
如图2所示,测量误差为P0,P1,P2,Δm和Δn的函数。其中:P0为拉线位移传感器拉绳的测试原点,P1为拉绳测量端在被测对象实验前的位置,P2为拉绳测量端在被测对象实验后的位置,Δm为拉线传感器安装点水平方向的位移量,Δn为拉线传感器安装点竖直方向的位移量。若记|P1P0|为l,偏转角度为θ,则在极坐标系中,拉线传感器此安装方向的测量误差可以表示为

3 变角度工作条件下的校准装置
从图2可知,拉线传感器的实际使用状态相对于校准状态发生了角度偏转,角度偏转一般为两维偏转,难以判断偏转对于测量结果的影响,需要重新进行变角度工作条件下的灵敏度校准。
根据静强度试验的拉线传感器变角度现场使用需求,将偏转角度分解到x,y两个正交方向,通过传感器安装方式的转换,分别实现x,y两个正交方向的灵敏度系数的校准。现场使用时,根据角度垂直投影确定x,y方向的角度分量,通过两个正交方向的误差合成,即可对现场测试误差给出快速判断。
结合拉线传感器的工作原理,设计了变角度工作条件下的拉线传感器校准装置,如图3所示。其中,转台的旋转为拉线传感器提供平面内的标准角度;气浮平台的移动带动传感器拉绳进行直线移动,并由干涉仪给出高准确度的直线位移值。在实际使用中,可能存在两个正交方向的角度偏转,因此设计了定心垂直翻转机构来安装拉线传感器,保证传感器翻转90°后出线口位置不变,始终处于转台旋转中心的轴线上,满足两个正交方向的误差合成要求。
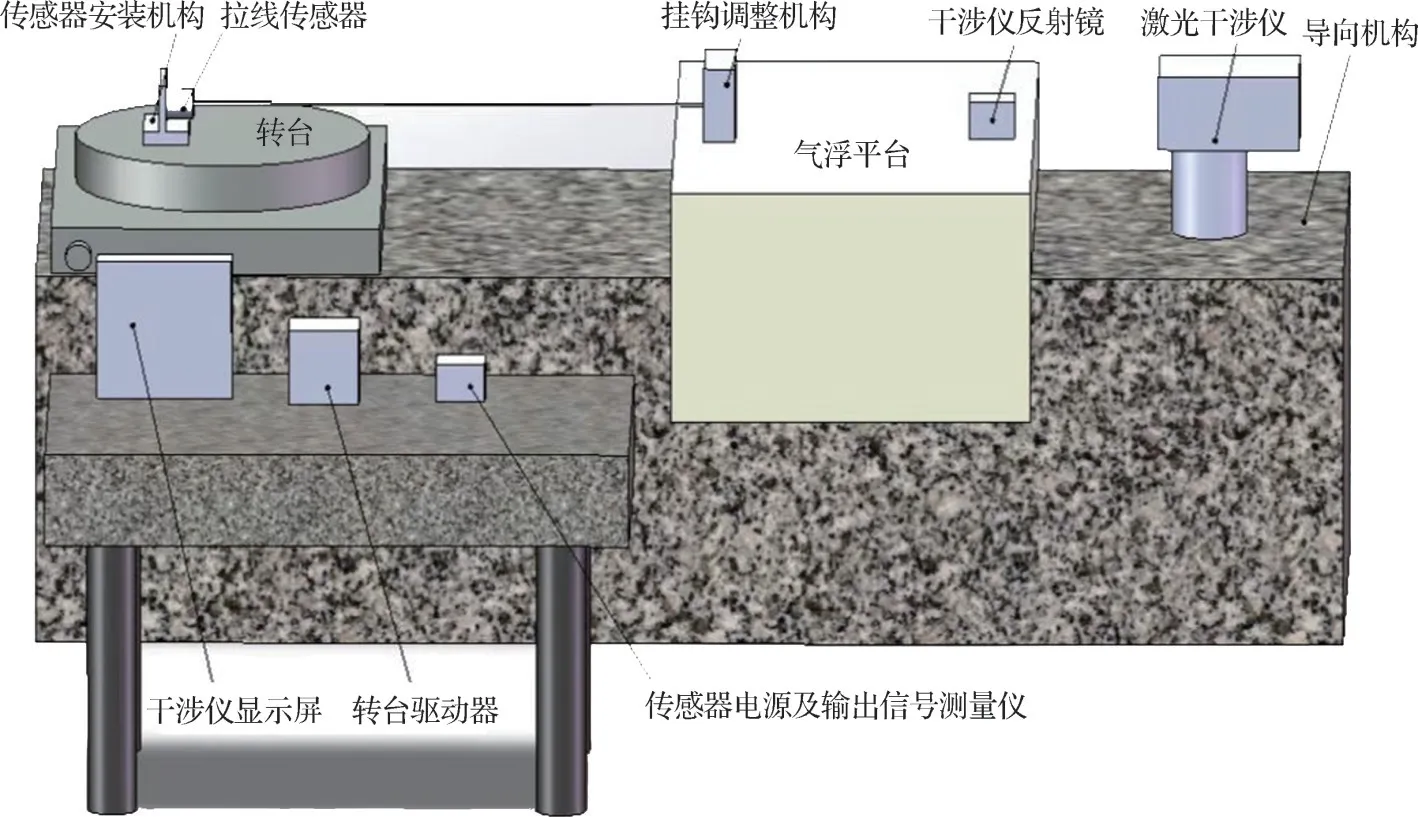
图3 拉线位移传感器变角度校准装置示意图Fig.3 Schematic diagram of variable angle calibration device for pull wire displacement sensor
4 校准方法与误差模型建立
依据图1(c)和图1(d)所示,分别进行拉线传感器的x向和y向安装,使用图3所示的校准装置进行拉线传感器的校准,校准方法为:
1)使用校准装置进行拉线位移传感器x向轴向灵敏度系数测试,将传感器进行x向安装,转台调至零位,控制气浮平台沿长导轨拉动拉线传感器;
2)选择拉绳绷紧后的位置作为测试的初始位置,记录激光干涉仪初始位移测量值l0和传感器的输出信号初始值I0;
3)控制气浮平台沿长导轨进行传感器量程以内的等间隔位置移动,在各个测量位置上锁紧气浮平台,分别记录传感器的输出值Ii和激光干涉仪测量值li。
拟合公式为

通过式(2)代入转台零位时的x向测量值,得到灵敏度系数k0x。
将转台旋转角度θx,重复以上步骤,进行x向角度θx时的灵敏度系数的测试,通过式(2)代入x向角度θx时测量值I0x,得到该角度对应的灵敏度系数kθx。
再进行拉线位移传感器y向轴向灵敏度系数测试,得到k0y和kθy。
x,y两个方向引入的测量误差模型分别为

其中,

则拉线传感器工作条件下的总误差模型为

5 校准试验的结果及分析
校准试验采用静强度现场试验中量程1 m的拉线传感器进行,采用35 m长导轨、气浮平台、一维转台(测量误差5″)、六位半万用表、激光干涉仪(测量误差1.0 µm/m)、钢板尺等组建校准装置,试验环境条件温度(20±1)℃,湿度小于等于80%,试验环境和试验设备均满足JJF 1305-2011《线位移传感器校准规范》中的指标要求。
依据前面提到的校准方法,将拉线传感器安装在定心垂直翻转机构上,通过机构的翻转,可以实现传感器x向和y向的灵敏度测试。在每个方向下,首先都要记录拉线传感器的零位位移和电流输出初始值,然后间隔100 mm进行8个测试位置的测试。由于安装方式占用了部分拉线尺寸,因此该传感器测试的范围变小,为0~700 mm;在每个测试位置上,转台的角度变化范围是-20°~+20°(实际测量中的角度偏转极限范围)。每旋转5°进行一次测试,记录每次测量时拉线传感器的输出电流值,并按式(2)计算得到每个偏转角度对应的灵敏度系数,结果如表1所示。
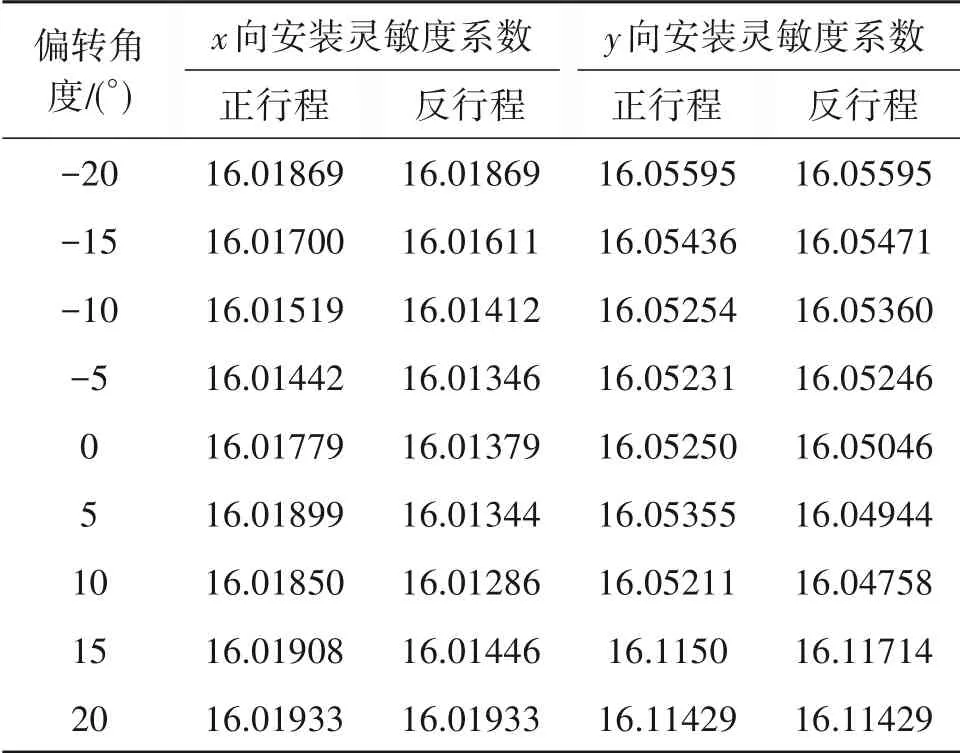
表1 拉线传感器灵敏度系数试验结果Tab.1 Test results of sensitivity coefficient of pull wire sensor
从表1的试验数据可以看出:
1)当偏转角度大于15°时,拉线传感器灵敏度系数明显变大;
2)拉线传感器正反行程的灵敏度不同,即使偏转角度为0°时,灵敏度也不同,使用中应适当考虑;
3)x向安装和y向安装,拉线传感器的灵敏度误差模型存在较大差异,此时,应在传感器上作出x向和y向的明确标记,保证使用与校准安装方向的一致性,总误差模型按式(5)进行计算;
4)使用该误差测量模型时,如果旋转角度在某一使用范围内,其变角度灵敏度与轴向灵敏度差别很小,由变角度引入的误差对于测量要求影响足够小,则变角度影响可以忽略不计。
根据静强度试验中所用拉线传感器的灵敏度测量误差模型得到的数据,可以进行现场误差的快速判断。当x,y两个正交方向同时存在偏转角度时,将现场最大偏转角度20°和拉线传感器使用长度1 m代入该偏转角度下的灵敏度测试结果,得到静强度试验中拉线传感器的灵敏度误差为0.74%,小于现场使用时1%的误差要求,满足使用条件。
6 结论
拉线传感器是广泛应用于一维位移测量的精密传感器,但在静强度试验过程中,可能会发生两个方向的角度偏转,即实际使用状态脱离了校准状态,因此为了确定拉线传感器在这种使用状态下能否满足现场试验的要求,设计了变角度双向灵敏度校准装置,构建了变角度工作条件下的拉线位移传感器正交误差模型,并将该成果应用到民用大飞机静强度试验现场,解决了现场测试误差的快速评定问题。
本文提出的校准和模型构建方法,解决了拉线传感器现场使用中因角度偏转造成的误差判定难题,给出了变角度工作条件下拉线传感器的灵敏度测量误差模型和现场误差快速判断方法,值得在拉线传感器的多个应用领域推广。
猜你喜欢
科学技术与工程(2022年23期)2022-09-30
现代电力(2022年2期)2022-05-23
作文小学高年级(2022年3期)2022-04-20
农村电气化(2021年4期)2021-05-12
Journal of Geriatric Cardiology(2021年1期)2021-03-03
福建中学数学(2018年1期)2018-11-29
北京航空航天大学学报(2017年5期)2017-11-23
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
风能(2016年7期)2016-03-23
