
基于边缘生长法的医用超声图像特定区域边缘提取
2022-10-15 08:39王明星
微型电脑应用 2022年9期
王明星
(唐山弘慈医院, 河北, 唐山 063020)
0 引言
医学超声影像在现代临床诊疗过程中发挥着重要的辅助作用,不仅能够呈现患者特定部位的病变信息,还能够在手术过程中引导医师准确地找到目标部位。然而,由于对比度较差,再加上成像过程中散斑噪声的干扰,使得医学超声影像的清晰度尚不能达到清晰辨识的要求,诊疗过程中所需的边缘提取也无法较好地实现[1]。为此,本文采取预处理的方法去除影像噪声并增强其清晰度,同时提出一种基于边缘生长法的区域边缘提取算法将影像中目标区域边缘像素点的灰度值与设定的阙值进行比较,结合边缘特征实现特定区域边缘的提取。
1 医学超声影像的预处理
1.1 降噪预处理
通过B超扫描获取的原始人体脊椎医学影像如图1所示。

图1 人体脊椎B超影像
设备发出的超声波在人体器官组织中相互叠加或抵消后返回接收器,按照干涉理论,在此过程中具有相同频率与振动方向以及固定相位差的多条声波在某些区域被强化,而在某些区域则被减弱甚至消失,这就是超声影像中散斑噪声的产生机理。除了这种乘性噪声以外,超声影像中还包含由电磁干扰和系统波动所产生的加性噪声。
超声影像的预处理流程如图2所示。

图2 超声影像预处理流程
超声影像中的噪声干扰总量[2]为
F[x,y]=H[x,y]×M[x,y]+A[x,y]
(1)
式中,F[x,y]代表原始超声影像,H[x,y]代表经过降噪处理的超声影像,M[x,y]代表乘性噪声,A[x,y]代表乘加性噪声,x、y代表影像中各像素点的位置坐标。
由于加性噪声所造成的干扰极小,可以在计算过程中忽略不计,因此式(1)可简化为
F[x,y]=H[x,y]×M[x,y]
(2)
通过同态滤波对乘性噪声进行处理,式(2)两侧同时取对数后可转换为[3]
logF[x,y]=logH[x,y]+logM[x,y]
(3)
将图1中矩形框部分的影像提取出来并依次进行小波降噪、对数变换、指数变换处理,得到图3(a)所示的影像,经过对比可见,经降噪处理后原始影像中的大量散斑噪声被有效去除,不同区域的边缘较原始图像清晰度有所提升。通过中值滤波后进一步提升了降噪效果,如图3(b),最后设定的灰度阈值将图3(b)转化为二值影像,得到图3(c)所示的影像,在该图中各区域边缘已经很容易区分辨认。

(a)
1.2 超声影像的增强
人体不同器官组织的声阻抗差别并不大,因而超声影像的对比度往往较低,必须采取一定的措施进行影像增强。图3(b)所对应的灰度直方图如图4(a)所示,由该图可见影像像素点灰度值范围为0.36~0.86。通过灰度增强的方式将图3(b)的灰度值提高到0~1,具体方式为
grey[x,y]=

(4)
式中,grey[x,y]代表(x,y)像素点的灰度值。增强处理后得到图4(b)所示的灰度直方图。

(a) 图3(b)的灰度直方图
经过增强处理的超声影像如图5所示,由该图可见影像的整体清晰度得到了明显的改善。
图5 降噪、增强后的超声影像
2 区域边缘提取
2.1 算法设计
本文采用边缘生长法对超声影像中各区域的边缘进行提取,将影像中目标区域边缘位置像素点的灰度值与设定的阈值逐一进行比较,结合边缘处所具有连续性、平滑性的特征进行选择排除。该方法的实现结果如图6所示。
步骤1 设定计算参数。选定部分颜色较深区域为提取侧,在此基础上进行参数设定,如图6(a)所示。
像素点灰度阙值T1为用以判断当前像素点的位置是否在提取侧。设grey[x,y]为(x,y)坐标处像素点的灰度值,若[x,y]位于提取侧内,当设定T1=0.2时,则式(5)成立:
grey[x,y]≤T1
(5)
连续阈值T2为检测边缘点过程中连续找到位于提取侧的边缘点的数量,在这里设定T2=2。
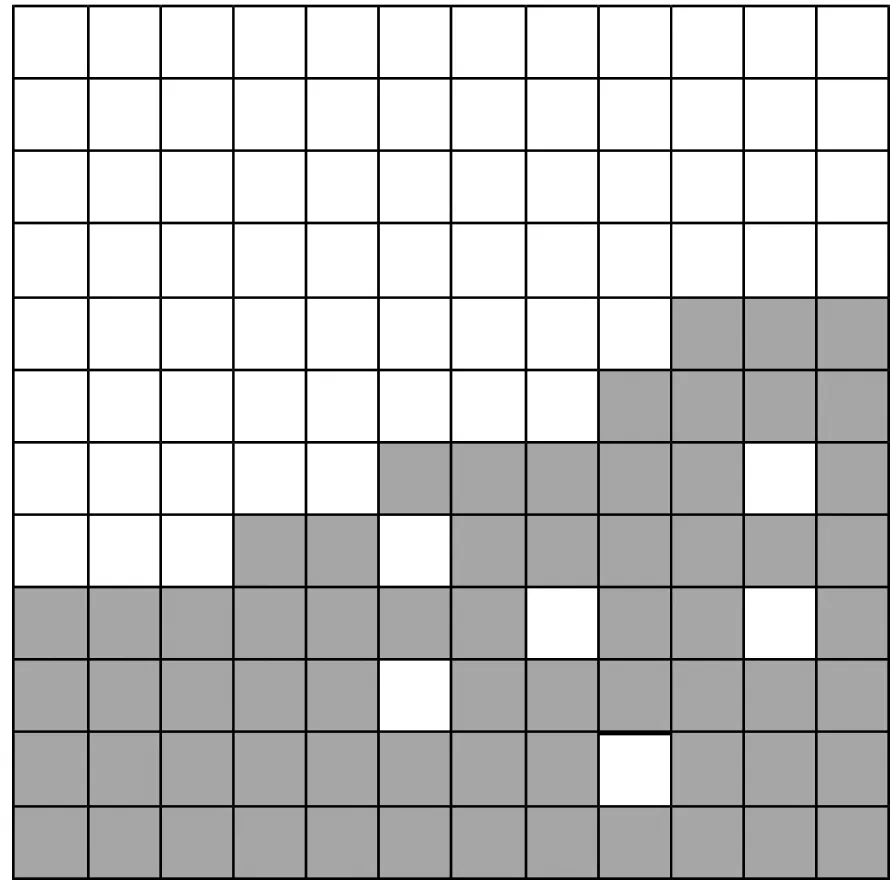
(a) 设定计算参数
提取邻域Dc是以当前像素点为中心,由其周围N×N个像素点所形成的正方形区域,在这里设定N=9。
步骤2 选定计算起始点[4]。如果是开放型边缘则应选取边缘线2个端点中的1个作为计算起始点,同时设定该点的生长延伸方向。在这里,生长方向通过该点切线与垂直方向的夹角θ表示,其取值范围为-180°~+180°。根据影像的具体形式,应自下而上扫描左边线,利用各点灰度值与阙值的比较结果确定第一个边缘点,在矩阵Dp中记录该点的坐标值,其中横坐标记为Dp[1,1],纵坐标记为Dp[1,2],同时测定θ的角度并将其记为Dp[1,3]。
步骤3 候选边缘点搜索。在这里需要首先做出如下定义。
方向环:以邻域Dc的中心点为圆心,以某一起始点为起点,逆时针连接各像素点所形成的封闭式圆环。在设定N=9的条件下,Dc邻域内共包括4个方向环,由里向外依次编号为1、2、3、4。
像素点方向角θ:Dc内除圆心以外的任意像素点和圆心的连线与垂直方向的夹角。
方向环的优先选择区域:邻域内每个方向环的优先选择区域不同。对于1号方向环来讲,其优先选择区域为与中心点θ值之差的绝对值为90°的像素点;2、3、4号方向环的优先选择区域与中心点θ值之差的绝对值分别为75°、50°、45°。
由里向外选取以计算起始点为中心的Dc邻域内的方向环,将其上各点的灰度值代入式(5)以确定其是否位于提取侧,根据方向角θ来确定每个方向环的起始点和边缘点的优先选择区域,若在搜索过程中已经发现一个以上的符合条件的候选边缘点,则结束在当前方向环的搜索过程直接开始在下一个方向环上进行搜索,否则就需要重复搜索过程到最后一个点。若某个像素点位于提取侧内且已发现至少T2-1个像素点同样位于提取侧内,那么可将该点列为候选边缘点。以上判定条件可总结为,假设某个方向环上的第m个像素点的灰度值为grey[m],该点被列为候选边缘点的条件为以下各式同时成立:
grey[m-1]≤T1
(6)
grey[m]≤T1
(7)
grey[m+1]>T1
(8)
步骤4 搜索新边缘点。将已找到的候选边缘点的θ值与计算起始点的θ值进行比较,找出连续性最强的那一组,记为新边缘点,同时将其坐标值与θ值列入Dp矩阵中。每个方向环上只能选取最多一个新边缘点。
步骤5 提取新边缘点。以Dp矩阵中的最后一个点为Dc邻域的中心点,重复步骤(3)、(4),通过计算获取该点的θ值。连续提取边缘点,在干扰点的影像下,提取出的区域边缘线存在不连续的情况[5]。
步骤6 结束边缘点提取。需要根据边缘的具体形式确定边缘提取的结束条件,例如开放边缘的提取结束条件为已搜索到影像边缘,封闭边缘的提取结束条件为Dp矩阵中再次出现计算起始点的坐标值。
步骤7 强化边缘点连续性。根据提取边缘点的连续性情况做出适当补充,使其呈现出更好的连续性。
步骤8 边缘线增强。对于具有较高分辨率的超声影像,由多个单点连接而成的边缘线清晰度较差,此时可采取增加边缘线宽度的方式对边缘线进行增强,如图6(b)所示。
2.2 超声影像边缘提取
运用边缘生长法按以下步骤人体脊椎超声影像的边缘进行提取。
步骤1 设定计算参数。选定部分颜色较深区域为提取侧,设定像素点灰度阙值T1=0.32,连续阙值T2=2,提取邻域Dc像素点个数N=9。
步骤2 选定计算起始点。从上边线自左向右扫描,利用各点灰度值与阙值的比较结果确定第一个边缘点,在矩阵Dp中记录该点的坐标值,其中横坐标记为Dp[1,1],纵坐标记为Dp[1,2],同时将测定θ的角度-10°记为Dp[1,3]。
步骤3 搜索候选边缘点。以计算起始点为邻域Dc的中心点搜索其周围的候选边缘点。
步骤4 搜索新边缘点。找出连续性最强的一组边缘点,同时将其坐标值与θ值列入Dp矩阵中。每个方向环上只能选取最多一个新边缘点。
步骤5 提取新边缘点。以Dp矩阵中的最后一个点为Dc邻域的中心点,重复步骤(3)、(4),通过计算获取该点的θ值。
步骤6 结束边缘点提取。搜索到影像右侧边缘时结束提取边缘点。
步骤7 强化边缘点连续性。根据提取边缘点的连续性情况做出适当补充,以强化边缘点连续性。
步骤8 边缘线增强。增加提取侧边缘线宽度,以增强边缘线的清晰度。
3 算法应用与先进性分析
采用多种边缘提取算法对图1所示影像中的矩形域边缘进行提取,以验证本文提出的边缘生长法相对于其他算法是否具有性能优势。通过本文边缘生长法提取的脊椎边缘结果如图7(a)所示。利用Sobel算子[6]提取的脊椎边缘如图7(b)所示。采用LoG算子[7]对影像进行边缘提取的结果分别如图7(c)所示。
3.1 算法准确性及连续性对比
通过图7中所有提取结果的对比可见,利用Sobel算子、LoG算子提取出的脊椎边缘普遍存在数量较多的假性边缘点,且Sobel算子提取结果中右侧出现的垂直线是在影像降噪时所产生的假性边缘线。由于边缘生长法是在N×N大小的邻域内进行边缘的提取,因此所获取的边缘线是真实的,虽然同样受到了一些噪声的干扰,但仍能够准确地提取出脊椎边缘,由此可见边缘生长法相对于其它算法具有更高的准确性。

(a) 本文算法提取
利用LoG算子从影像中提取出的脊椎边缘出现了较多的断点,其他几种算法的提取结果都具有较好的连续性。采用边缘生长法提取区域边缘时,所有搜索到的边缘点坐标都统一列入Dp矩阵中,且通过适当补充保持了边缘线的连续性,又以增加宽度的方式提升了边缘线的清晰度,因此提取出了图8所示的连续性更好且更加清晰的脊椎边缘,其中图8(a)为本文算法提取后的局部放大图,图8(b)为采用LoG算法提取后的局部放大图。

(a) 本文算法提取后的局部放大
3.2 算法运行效率对比
对于影像中区域边缘的提取,与其他几种算法相比,边缘生长法具有以下特点:
1) 无需进行影像转换,能够直接从灰度影像中提取出特定区域的边缘,其他几种算法需要将原始影像转换为二值影像后再进行边缘提取;
2) 采用边缘生长法提取区域边缘时只需针对边缘附近位置的像素点进行计算,由此节省了大量非边缘点的计算时间;
3) 依据边缘点的θ值可对优先选择区域内的像素点进行计算,一旦检测到边缘点即可进入下一个方向环进行像素点的计算和判断。
在相同的软硬件环境中分别通过上述各种算法[8-10]对图1原始影像中的脊椎边缘进行提取,每种算法的总运行时间如图9所示。数据可见,边缘生长法的边缘提取运行时间远低于其他几种算法,由此可证明该算法的运行效率更高。

图9 不同算法的边缘提取时间
4 总结
原始的医用超声影像对比度较低,且由于成像过程中散斑噪声的干扰清晰度也并不理想,因此必须采取措施进行影像降噪和增强。本文采取小波降噪、对数变换、指数变换的方式进行影像变换和预处理,有效去除了干扰,降低了影像噪声。同时,为了从转换后的影像中提取出清晰的区域边缘,提出了一种基于边缘生长法的边缘提取方法,选取边缘附近的一个像素点作为计算起始点,通过设定的阙值在其邻域内搜索边缘点,最终获取清晰的特定区域边缘线。实际应用结果表明,本文所提出的算法相对于其他同类算法具有更好的连续性、准确性和更高的运行效率。
猜你喜欢
农业工程学报(2022年7期)2022-07-09
包装工程(2022年9期)2022-05-13
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
电子技术与软件工程(2019年8期)2019-07-16
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
知识力量·教育理论与教学研究(2013年11期)2013-11-11
