
基于机器学习的动态环境运动目标自动识别研究
2022-10-15 08:47周献珍张抒
微型电脑应用 2022年9期
周献珍,张抒
(1.常州旅游商贸高等职业技术学校, 督导评估处, 江苏, 常州 213033;2.杭州有情文化艺术有限公司, 浙江, 杭州 310000)
0 引言
运动目标识别是机器视觉领域和视频处理技术的基础研究课题,其目的是在图像序列或视频中把感兴趣的背景和运动目标分离,获得运动目标位置信息[1-2]。提取目标对象可为之后的跟踪提供基础,因为识别结果影响后期应用效果,所以很多学者一直对运动目标的识别算法进行不断地改进来获取准确的图像[3]。
运动目标的识别方法针对视频图像的特殊性,常用的运动目标识别方法有:亢洁等[4]研究的基于RPCA与三帧差分融合的运动目标检测方法;张彩珍等[5]研究的基于五帧差分和模板匹配的运动目标检测识别方法。这2种方法虽然简单,但对运动目标的识别存在空洞、轮廓不完整的问题。
计算机视觉主要应用在图像处理、人工智能、模式识别等方面。机器学习作为计算机视觉的一种,其主要研究目的是为了获取环境中的物体信息,实现用计算机代替人眼和大脑,最后解决真实描述、识别和存储图像中的高级视觉问题。为此本文提出了基于机器学习的动态环境运动目标自动识别方法,检测图像序列中的所有运动目标,并将检测到的目标特征作为一类目标进行目标跟踪,提升图像跟踪识别效果,为后续应用提供强有力的数据支撑。
1 基于机器学习的动态环境运动目标自动识别方法
1.1 运动目标检测算法
运动目标检测常用的方法之一是帧间差分法。通过视频图像中相邻两帧图像的差异,用一个阈值来判断是否存在运动物体,并对时间上相邻的图像在视频图像中的绝对差进行求解[6-7]。帧间差分法原理为假设视频图像中第k帧图像各像素点的灰度值为Ik(i,j),第k-l帧图像各像素点的灰度值为Ik-1(i,j),则差分图像为
Dk(i,j)=|Ik(i,j)-Ik-1(i,j)|
(1)
通过设定阈值T来对上述得到的差分图像中的各个像素点进行判断,视频图像中的运动区域提取为

(2)
针对三帧差分法的不足之处[8],在三帧差分法基础上对五帧差分法进行改进,5帧图像在预处理后表示为ft(x,y)、ft-1(x,y)、ft-2(x,y)、ft+1(x,y)、ft+2(x,y)。其中,利用中间帧ft(x,y)分别和前后2帧做差分运算,计算结果为
D13(x,y)=|ft(x,y)-ft-2(x,y)|
(3)
D23(x,y)=|ft(x,y)-ft-1(x,y)|
(4)
由于运算造成的目标重叠现象和克制空洞现象进行目标轮廓优化,获得最后的目标轮廓为
D34(x,y)=|ft(x,y)-ft+1(x,y)|
(5)
D35(x,y)=|ft(x,y)-ft+2(x,y)|
(6)
用“与”运算方法分别对差分后的结果D35(x,y)和D13(x,y),D34(x,y)和D23(x,y)进行运算:
D1=D13(x,y)⊗D35(x,y)
(7)
D2=D23(x,y)⊗D34(x,y)
(8)
“与”运算通过采用中值滤波对图像中的部分噪声进行去除[9],通过对图像进行差分,有利于运动目标的提取,实现D1和D2的滤波处理,同时运用动态阈值进行二值化处理。将结果使用“或”运算,可以有效克制运算造成的目标重叠现象和克制空洞现象[10],获得最后的目标轮廓:
D(x,y)=D1⊕D2
(9)
改进五帧差分的运动目标检测算法是以五帧差分算法为基础,利用中值滤波对图像进行去噪处理,通过改进的五帧差分法检测到比较完整的运动目标轮廓[11]。最后经过后期处理可以准确完整提取运动目标区域。改进算法整体流程如图1所示。

图1 改进算法流程
整个算法流程中,对连读的5帧图像分别进行中值滤波处理,其他4帧图以中间帧为基础分别进行差分运算,得到的差分结果D13、D23、D34、D35分为2组分别进行取“异或”、取“与”操作。将同时存在的前景运动目标取出进行取“与”操作,将分差后各自的运动目标取出进行“异或”操作,操作中会比原来存在更多的噪声。当存在的前景运动目标像素最多,重现现象和噪声也增多的情况下,把相同的以及各自的运动像素合在一起进行“或”操作,将生成的2帧进行“与”操作,得到前景运动目标,能改善重影以及消除大部分噪声,实现对运动目标的初步检测。
1.2 动态环境运动目标跟踪优化
采用CamShift算法(continuously adaptive MeanShift algorithm,连续自适应的均值漂移算法)实现动态环境运动目标自动跟踪识别。Camshift算法是以MeanShift为基础,将MeanShift算法扩展到视频图像序列中,将MeanShift迭代作为核心,自适应调节搜索窗的宽度来适应运动目标在图像中的尺寸变化,是一种图像的颜色概率统计和分布直方图的算法[12]。
因为RGB颜色空间对光照亮度的变化比较敏感,CamShift算法需要基于颜色特征的跟踪算法,把图像RGB颜色空间转换到颜色空间来减少光照对跟踪的影响。根据每个像素点的HSV颜色空间在目标区域的色度值建立的颜色直方图和颜色概率分布图为反向投影图(Back-projection Image),输入像素点为目标像素点的概率通过查询颜色概率分布图可获取;然后对MeanShift进行迭代运算;最后调整搜索窗的大小、目标的位置、质心的计算,密度分布的最大值收敛在目标反向投影图上[13]。CamShift算法是将全部帧实施MeanShift运算,把上一帧搜索窗口的中心和大小的结果当作下一帧MeanShift算法的窗口初始值[14-15],迭代之后,直至找到目标位置。
图2为CamShift算法流程图,步骤具体如下:确定搜索窗口以及跟踪目标;提取Hue分量生成颜色直方图,把输入图像变换成HSV空间;反向投影图的建立需要根据颜色直方图把窗口中心移动到质心,质心为跟踪搜索窗口内计算坐标的期望;收敛时通过MeanShift算法迭代进行搜索;在此基础上获得搜索新的窗口大小和窗的中心位置,以此参数进入下一帧图像的目标跟踪和搜索,用S来调整搜索窗口的大小。
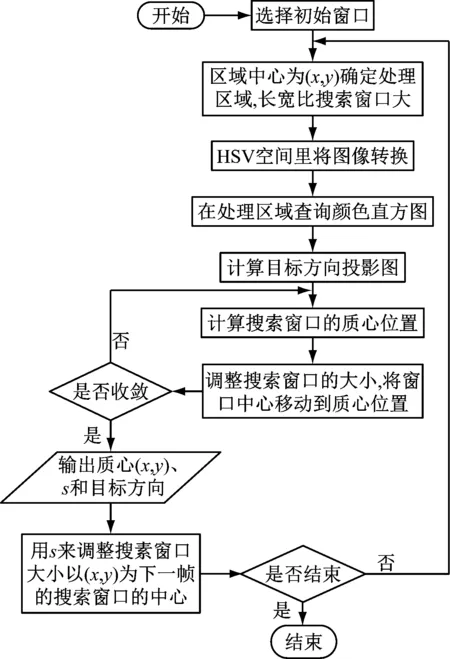
图2 CamShift算法流程图
像素在搜索窗中的位置用点(x,y)表示,点(x,y)是二值图像I(x,y)中的像素值。得到搜索窗口的一阶矩和零阶矩为

(10)
质心位置为
(11)
为了固定运动识别窗口大小,进行图像的二阶矩计算目标的尺寸和方向:
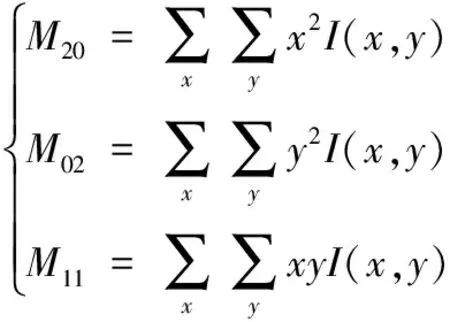
(12)
假设参数:

(13)
下一帧图像中,搜索窗口长轴l,短轴长度w与旋转角θ分别为
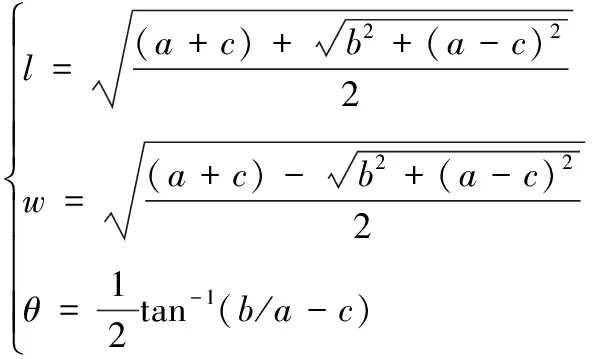
(14)
CamShift算法计算量小,跟踪效果好,当跟踪的运动目标速度过快时,也不会致使跟踪失败,至此完成了动态环境运动目标自动识别方法设计。
2 仿真实验结果与分析
通过某机器视频截取动态环境运动目标样本,针对视频中的室内人物、室外车辆以及飞机降落时的运动目标进行研究。实验结果主要选取基于RPCA与三帧差分融合的运动目标检测(文献[4]方法),以及基于五帧差分和模板匹配的运动目标检测(文献[5]方法)为本研究所提方法的对比方法。
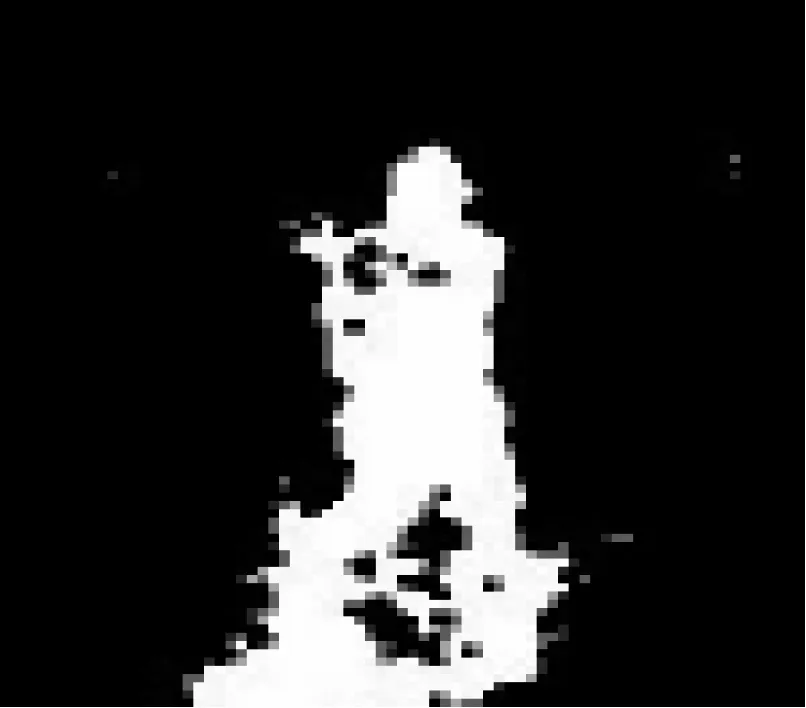
3种方法运动目标检测完整度如图3~图5所示。从图3~图5可知:室内测试视频中,文献[4]方法有明显的轮廓“空洞”现象,文献[5]方法有明显的轮廓阴影出现,本研究运动目标提取完整;室外测试视频中,文献[4]方法仍然存在有轮廓“空洞”现象,文献[5]方法同样有明显的轮廓阴影,而本研究所提方法解决了阴影和轮廓不明显的问题,检测目标完整。飞机降落视频的运动目标检测是一种快速的运动目标检测。文献[4]方法有“双影”现象,文献[5]方法有拖尾现象出现,本研究所提方法的检测效果最清晰,轮廓提取最完整,检测效果优势显著。

(a) 室内视频原始图像
(c) 文献[5]方法检测结果

(a) 室外视频原始图像

(c) 文献[5]方法检测结果
将识别率和误识别率2项指标作为验证对本研究所提方法识别效果的指标。在同等条件下,分析3种方法识别结果,如表1所示。检测视频中3种方法都能有效地检测出运动目标,并且识别率都能达到90%以上,但误识别率有明显差距,文献[4]方法的误识别率和文献[5]方法的误识别率都较高,而本研究所提方法在误识别率上有明显改进,视频识别结果能够准确完整地表现运动目标,运动目标轮廓清晰。

(a) 飞机降落原始图像

(c) 文献[5]方法检测结果

表1 不同视频类型中3种方法的识别率与误检率
3 总结
动态环境运动目标的自动识别研究一直广受关注,相对于静态环境的运动目标识别,动态环境下的运动目标识别难度更大,所面临的挑战也更大。伴随机器学习技术应用的逐渐广泛,使得利用机器视觉实现动态环境运动目标识别成为可能,为此本文研究并提出了基于机器学习的动态环境运动目标识别方法。所提方法能有效结合改进五帧差分法和CamShift算法,共同完成运动目标跟踪识别,可有效避免当前目标识别存在的空洞、重影问题,可以识别到轮廓明显、完整性较好的运动目标,且该方法的识别率高、误识别率低。但本研究仍存在一些不足,未对不同气候环境的动态运动目标进行识别,在今后的研究中会针对该方面加以改进,以确保研究更加深入完整。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
时代英语·高一(2019年5期)2019-09-03
上海师范大学学报·自然科学版(2018年3期)2018-05-14
计算机应用(2016年10期)2017-05-12
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12
电脑知识与技术(2016年24期)2016-11-14
大灰狼(2009年7期)2009-08-26
