应用红外图像识别技术的电机滑模变结构同步控制方法
2022-10-14 06:10:40陈虹洁
机械与电子 2022年9期
陈虹洁,魏 超
(烟台黄金职业学院,山东 招远 265401)
0 引言
计算机技术推动了电机控制的发展,控制系统种类日益丰富,功能也越来越强大,直至现在,机械生产基本都依赖电机拖动,电机控制水准也从侧面体现出国家机械加工水平。在各类生产活动中,只有实现电机的自动合理控制,确保各部件正常运行,才能使加工工艺符合既定要求、提升生产效率、保证产品质量。
滑膜变结构同步控制是一种常用控制策略,该方法与其他控制方法的最大区别表现为控制过程不连续,能够使系统结构随时发生变化。虽然此种方法鲁棒性强,但是控制稳定性差,当电机内部结构复杂时,控制电压不能获得很好的跟踪效果。
为此,广大学者纷纷将不同算法应用在滑膜变结构同步控制中。肖仁等[1]基于时间扰动观测器提出一种自适应控制方法。结合时间观测器特点,获取电机模型误差与不确定扰动的估计,补偿扰动估计;抑制趋近律的抖动,使电机获得更加准确的跟踪轨迹,但是其难以满足自动化生产需求。田猛等[2]引入神经网络算法,利用神经网络强大的学习能力,不断调节滑膜变结构增益,确保滑膜函数与切换面相接近,有效避免抖动现象,但是其控制过程的稳定性较差。
随着控制领域智能化与自动化水平的提高,各类新型技术不断涌现,红外图像识别技术与电机控制技术的结合就是一种新的尝试。本文从2方面入手:
a.应用红外图像识别技术采集目标运动状态与有关控制量。
b.将采集到的图像信号变换为电信号,设计一种滑膜控制器实现同步控制。
红外图像识别技术的关键在于红外热成像,成像效果直接决定图像质量。由于受到设备材质与工艺影响,热成像技术发展缓慢。因此,本文通过空间域图像增强和直方图均衡化等过程,提高图像质量,最大程度获取目标运行信息,实现电机滑膜变结构同步控制。
1 红外图像采集
红外热像仪是采集图像的主要设备,能够接收波长为0.75~1 000 μm的辐射波,可实现辐射信号与电信号之间的转换[3-4],最终将转换结果显示在示波器中[5]。成像仪结构主要包括以下几部分。
a.光学系统。
可改变光束分布情况,提高灵敏照度,加强仪器探测性能。在图像采集过程中,光学系统需符合下述条件:尺度相对较小,孔径尽可能最大;必须存在明确视场角,保证辐射损失最小;当目标移动时不能出现明显畸变现象;在不同恶劣条件下,光学性能依然保持稳定。
b.扫描器。
主要任务是沿整个视场扫描目标,实现目标成像及持续分解。
c.红外探测器。
其是热像仪的主要部件,不但可完成图像取样,还能利用光电效应转换信号。探测器数量影响着成像效果,当数量发生变化时,信号处理性能也随之改变。
d.制冷机。
减少热噪声与背景噪声,确保探测器正常工作。因探测器在成像系统中占用空间很小,所以制冷器也有体积要求,需最大程度微型化。
e.信号处理。
探测器的电信号十分微弱,只有经过放大处理后才能显现。通过信号处理电路将信号放大、分离,并传输到控制装置。
将上述装置根据使用说明进行有效连接,即可实现红外图像采集。但获取的初始图像由于操作不当或设备自身因素影响,图像质量较差,需要做增强处理。
2 红外图像预处理
2.1 空间域增强
空间域增强就是改善图像整体像素f,处理公式为
g(x,y)=T[f(x,y)]
(1)
f(x,y)为初始图像;g(x,y)为经过处理的图像;T为针对f的特定操作,操作范围在(x,y)的邻域上。
某点(x,y)的邻域可描述为以(x,y)为中心点的矩形子图像。该图像中心由某像素移动至另一像素,将T操作作用在所有(x,y)的位置上均可获得此点输出g。
当邻域尺度是单个像素时,T操作形式最为简便。此时,g只与f在(x,y)点处的值相关,且T操作也是强度映射,表示为
s=T(r)
(2)
r、s为f(x,y)和g(x,y)在点(x,y)上的灰度值。经过上述处理后,图像整体像素得到提高,但是灰度值与边缘部分还需做进一步处理。
2.2 直方图均衡化
此种处理过程就是将图像中灰度值较大的像素向邻域扩展,保证灰度值更加均衡,增强图像对比度。直方图均衡化具体实施过程如下。
假设某图像像素为n,灰度级总数为L,nk描述灰度级为rk的像素数量,计算第k个灰度级发生概率为
(3)
其中,0≤rk≤1,k=0,1,2,…,L-1。利用变换函数T(r)对式(3)做均衡化处理,得到
(4)
由此可知,均衡化后的灰度值Sk可通过初始直方图获得。经过上述操作,图像对比度明显提高,视觉效果增强。
2.3 Laplacian算子锐化
Laplacian算子属于微分算子,存在旋转不变特性,能够满足红外图像边缘锐化需求[6]。针对图像f(x,y),其Laplacian算子为
(5)
锐化后的图像具备下述特征:
当灰度斜坡∇2f等于0时,斜坡起点和终点处不等于0;∇2f对图像细节具有很好的响应效果。
基于上述优势,Laplacian算子可以很好地描述边缘细节,同时也能保护背景信息,其表达式为
(6)
经过所有预处理操作后,红外图像中可显示出更多目标信息,为电机同步控制提供参考依据,保证控制器可根据目标实际需求下达控制命令。
3 应用红外图像识别技术的滑膜变结构同步控制
3.1 电机数学模型构建
要想实现滑膜变结构的精准控制,必须建立电机数学模型,但如果在三相坐标系中建立该模型[7],会增加计算复杂度,因此,本文经过坐标变换,在两相坐标系统中构建电机运动数学模型。
3.1.1 坐标系建立与坐标变换
a.静止坐标系。
又称为α-β坐标系,假设两相位置差距为90°,轴线为α和β。在固定绕组中,存在两相平衡交流电iα和iβ[8],此时会生成空间矢量Fj。
b.旋转坐标。
又称作d-q坐标系,固定在转子上,旋转角频率为ω。d和q2个坐标轴的相差同样为90°,若在d、q中通入电流id和iq,也会生成磁动势空间向量Fj。
c.坐标变换。
电机坐标变换中最重要的是交流量和直流量之间的相互转换,将不同物理量由静止坐标系变换到旋转坐标系中。转换过程需遵守下述规则:保证变换前后旋转磁动势域单机功率相同。结合上述规则得到静止、旋转坐标系和三相坐标系之间的变化关系为:
(7)
(8)
(9)
θ为d轴和α轴夹角;(a,b,c)为三相坐标系;F为电压、电流等向量。上述变换公式均为可逆的。
3.1.2 数学模型构建
在d-q坐标系中,忽略高次谐波影响[9],构建电机数学模型。其中,电压方程为:
(10)
(11)
电机定子磁链表达式为:
ψd=Ldid+ψf
(12)
ψq=Lqiq
(13)
电机转矩方程式为
(14)
电机运动方程式为
(15)
ud和uq为d、q轴电压;R为电阻;ψd和ψq为不同轴上的气隙磁链;ψf为耦合磁链;Ld和Lq为主电感;np为磁极对数;J为转动惯性;B为摩擦系数。
3.2 滑膜变结构同步控制器
本文设计一种基于红外图像传输的同步控制器,该装置预留图像传输接口,可接收红外图像,并能将图像信号变换为电信号,再将电信号传输给控制器的主控处理单元,结合目标信息,设置控制规律,进而实现同步控制。该同步控制器设计过程中,切换函数选择和控制规律设置是最为关键的2部分。
3.2.1 切换函数选择
S(X)=S(X1,X2,…,XN)=0
(16)
该切换面将空间划分为S>0和S<0 2个子空间。当运动点位于切换面S=0时,若穿越此点,则该点属于通常点;若离开此点,该点就是起始点;若由切换面两侧向此点运动,则将其视作终止点。
由于通常点和起始点的研究价值较小,因此,本文将滑膜模态确定在终止点区域中,运动点如果运行在该区域附近,就会进入滑膜区,沿着切换面运动,直至达到指定界面。
3.2.2 控制规律设置
本文设计的控制规律包括以下3种,根据具体情况,选择相应控制规律。
a.函数切换控制。
(17)
b.状态变量控制。
U=φX-ksgns
(18)
φ=[φ1,φ2,…,φn],k为常数。其中控制量是通过状态变量加权获取的,变量系数与滑膜到达条件有关。
c.等效控制。
U=UL+ksgns
(19)
在等效控制中不仅包含等效部分UL还有切换部分ksgns。
为确保在上述控制规律约束下到达指定滑膜面,需进一步探究滑膜面S具有的函数性质。
(20)

将上述切换函数与控制规律引入到控制器中,即可根据目标实际情况下达控制指令,达到电机滑膜变结构同步控制目的。
4 仿真实验数据分析与研究
仿真实验中,将永磁同步电机作为控制目标,电机额定转速设置为1 500 r/min,额定电流为2 A,阻尼系数为0.001 9。使用的红外热像仪型号为SC3000,该设备灵敏度较高,测温范围非常广,具备数据高速采集功能,能够满足精准控制领域需求。成像设备具体参数如表1所示。
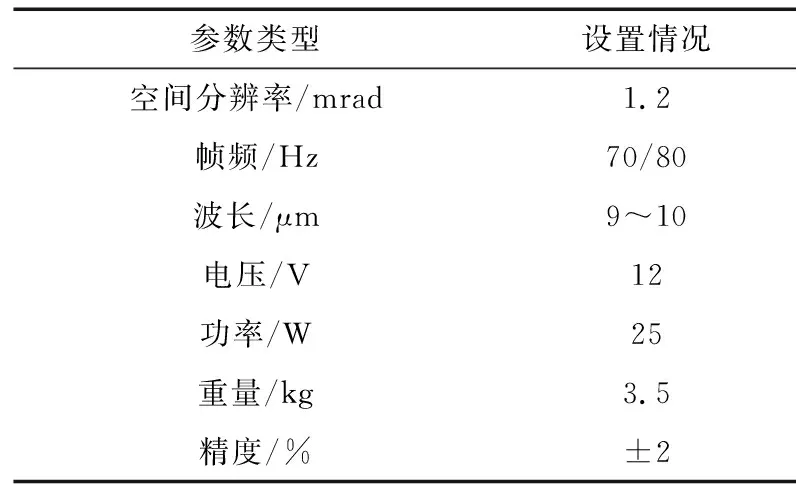
表1 成像设备参数
基于表1,利用上述红外热像仪采集目标图像的具体步骤如下:结合目标大小和距离挑选镜头;将设备电源线、采集线连接完好;打开红外热像仪并制冷一段时间;制冷结束后,调整焦距,打开摄像头盖采集目标图像;将采集到的目标图像按照所需格式保存。
由于图像质量影响着最终控制结果,所以需要检测图像质量。分别将图像灰度直方图、平均局部信息熵作为图像评价指标,测试结果如图1所示。
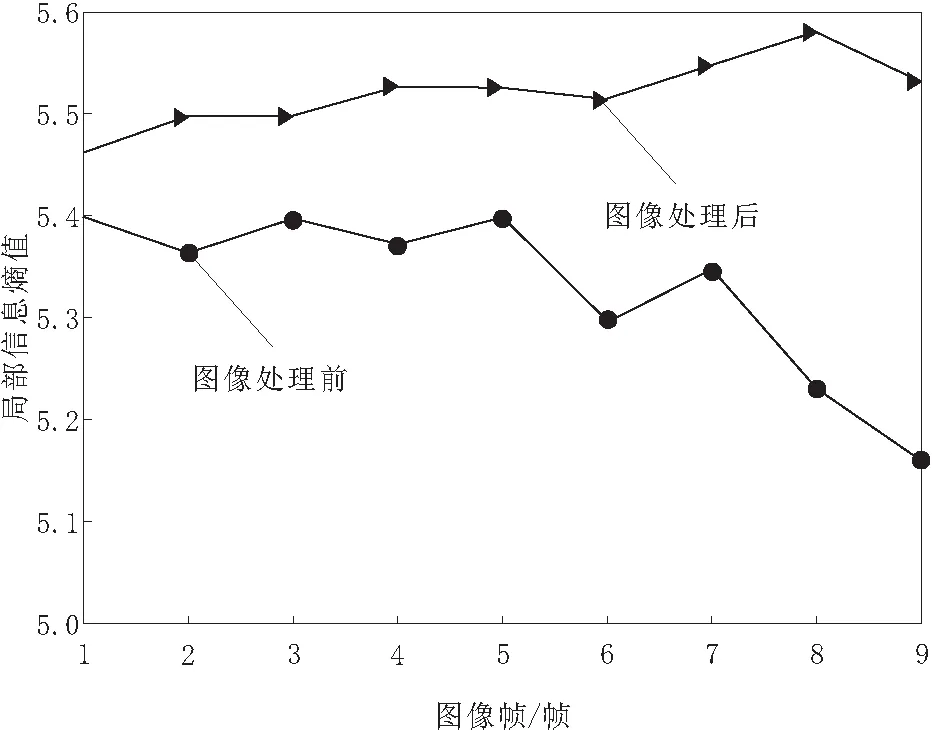
图1 局部信息熵对比
由图1可知,图像处理前后每帧的局部信息熵值有很大区别,处理前信息熵较小,且帧与帧之间差别较大;经过图像空间域增强和算子锐化等操作后,红外图像的信息熵提高,表明图像内容丰富,细节信息更加清晰,更加有助于目标特征提取。
上述实验证明红外图像方法可以很好地采集目标信息,为电机滑膜变结构控制打下坚实基础。下面根据采集的信息,利用本文设计的滑膜控制器完成同步控制,同时将电机滑模变结构电压跟踪效果作为评价标准,利用时间扰动观测器控制算法、神经网络方法与本文方法做对比,仿真结果如图2所示。
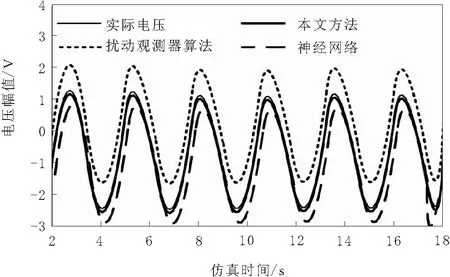
图2 不同算法转矩跟踪曲线
由图2可知,应用红外图像技术跟踪到的电压值和设定电压值相吻合,而其他2种算法的跟踪效果并不理想,难以消除控制抖动现象。这是因为本文针对同步控制器设置合理的控制规律,提高电压跟踪的准确性,另外红外图像提供的目标信息为控制器提供控制依据,实现精准控制。
在仿真环境中添加1个示波器与2个探头,设备连接完成后启动电机,观测示波器中信号相位是否相差90°,实验结果如图3所示。
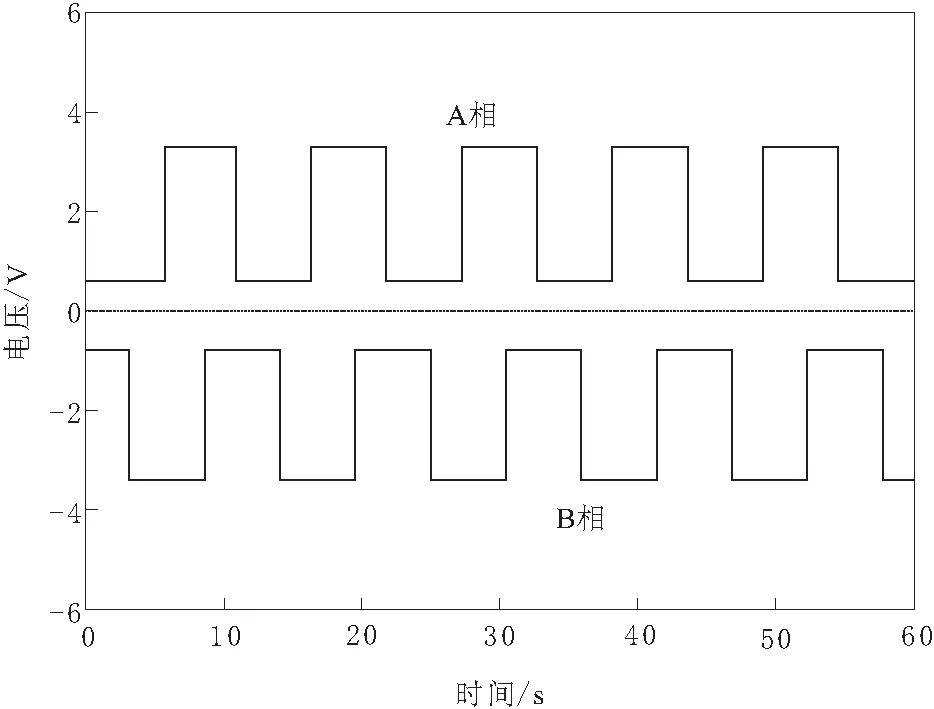
图3 脉冲波形
由图3可知,本文方法输出的脉冲波形十分规整,满足相位相差90°的要求,进一步证明该方法具备控制稳定性优势。
5 结束语
机械制造技术的发展带动电机控制走向智能化与自动化。本文应用红外图像技术,采集目标具体信息,设置滑膜变结构同步控制器,根据目标特征,设计控制规律,实现同步控制。仿真实验证明了本文方法能够为电机滑膜变结构控制提供相关依据,提高控制精度与稳定性。随着控制理论的日渐成熟,相信在未来研究中自适应算法、神经网络等智能方法也会逐步改善,使电机的应用越来越广泛。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
舰船科学技术(2022年10期)2022-06-17 06:26:42
建材发展导向(2021年14期)2021-08-23 00:57:20
高技术通讯(2021年3期)2021-06-09 06:57:48
自动化学报(2017年5期)2017-05-14 06:20:56
制造技术与机床(2017年2期)2017-05-04 04:17:24
光学精密工程(2016年1期)2016-11-07 09:01:59
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:41
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09