基于动态电压修正的IPMSM 动态过调制策略研究
2022-10-13 03:12李银露舒志兵
电源学报 2022年5期
李银露,舒志兵
(1.南京机电职业技术学院自动化工程系,南京 211306;2.南京工业大学运动控制研究所,南京 211816)
基于内置式永磁同步电机IPMSM(interior permanent magnet synchronous motor)的电力传动系统具有高效运行区域广、功率密度大、调速范围宽和可靠性高等优势,在皮带运输机、电动汽车和高性能电梯等领域得到了广泛应用[1-3]。受限于逆变器输出最大线性调制电压,IPMSM 在基速以上弱磁运行时的电磁转矩输出能力下降[4]。利用过调制策略可以有效扩展逆变器直流母线电压利用率[5],从而提高弱磁运行工况下电磁转矩的输出能力[6]。文献[7]提出了过调制区域的逆变器连续控制技术,在过调制区域将电压矢量分区处理,过调制一区重点进行幅值修正,进入过调制二区之后对相位、幅值同时进行调整,逐步提高母线电压利用率至最优状态;文献[8]通过对电机所需输出电压的傅立叶级数展开,推导出了空间矢量脉宽调制SVPWM(space vector pulse width modulation)的基准角和保持角,不仅可以实现从线性区到六步法的平稳过渡,还减小了输出电压的谐波含量;文献[9]量化分析了过调制策略在增加直流母线电压利用率和降低逆变器开关损耗两个方面的优势。逆变器过调制运行时,实际的输出电压与其给定值存在偏差,必然会对电机调速系统的动态性能造成影响。然而,上述研究的关注点局限于输出电压范围的扩大,未考虑过调制区域电压矢量修正过程中对于动态性能的影响,容易造成电流以及电磁转矩的紊乱[10-12]。文献[13]研究了基于非零矢量作用时间优化的动态过调制策略,可有效改善过调制区异步电机直接转矩控制的动态性能,但此方法无法直接应用于基于矢量控制的IPMSM调速系统。
针对上述问题,本文在IPMSM 矢量控制[14-15]的框架下提出了一种新型动态过调制策略。将矢量控制的输出给定电压分解为反电势电压和动态电压两个部分,在电机控制系统出现较大转速、转矩突变进入过调制状态时,在保证原电压矢量的反电动势不变的基础上,对电流调节器输出的动态电压进行修正以优化d、q 轴电流的动态响应。该方法既能有效提高系统的直流母线电压利用率,又能提高电机控制系统在工况突变等动态情况下动态响应能力,提升动态性能。仿真及实验结果验证本文所提新型动态过调制方法的有效性。
1 传统过调制策略的动态性能分析
通过对逆变器过调制区域的合理利用可以极大程度地提升IPMSM 电磁转矩输出能力。传统的过调制策略偏重于研究逆变器非线性区的有效利用,其基本原理为:当逆变器输出的电压矢量超出电压限制边界之后,通过一定的映射规则重新将电压矢量引导至电压矢量限制边界以内,并以此作为逆变器的实际输出电压。
传统过调制策略示意如图1 所示。图1(a)为静态过调制策略中最常见的最小相位误差过调制策略的原理,即保持给定电压矢量Uref的相位不变,直接采用参考矢量与六边形电压边界的交点作为实际输出电压矢量。图1(b)所示为最小幅值误差过调制修正策略,将参考电压在六边形边界上的投影作为最终输出电压,从而最大程度地缩小实际输出电压矢量与原有参考矢量之间的幅值误差。上述两种静态过调制方法均能将IPMSM 的电压运行边界由六边形的内切圆扩展至六边形,从而实现直流母线电压利用率的提升。然而,上述方法的优化目标仅为直流母线电压利用率的提升,未充分考虑到参考电压矢量修正对于系统动态性能的影响。
IPMSM 高速运行工况下可忽略定子电阻压降,其电压方程可表示为
式中:Ld、id和uds分别为d 轴电感、电流与电压;Lq、iq和uqs分别为q 轴电感、电流与电压;ψf为转子永磁体磁链;ω 为电角速度;p 为微分算子。
将式(1)中的微分项分别定义为动态电压项(Uds_PI与Uqs_PI),将与转速有关的项分别定义为反电动势项(Eds与Eqs),则式(1)可改写为

根据式(1)可得式中Eds与Eqs计算公式为

在稳态时,动态电压的数值接近于0,而在动态时,Uds_PI与Uqs_PI分别取决于d 轴与q 轴电流给定值与反馈值的差值以及d、q 轴电流调节器的控制参数。当Uqs_PI为正时,将使得q 轴电流增加;反之q 轴电流向负方向运动。同理,可得d 轴电流的动态调节过程。以最小相位误差法过调制策略为例分析传统过调制策略的动态性能,如图2 所示。
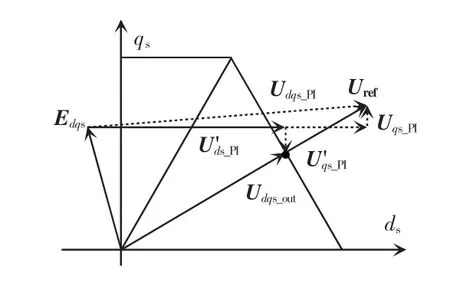
图2 传统过调制策略电压分解示意Fig.2 Schematic of voltage decomposition under conventional overmodulation strategy
参考电压矢量Uref超出六边形边界并被映射至矢量Umod位置。在映射之前,Uref所处的位置对应的q 轴动态电压Uqs_PI为正,因此矢量控制的预期是使得q 轴电流增加。然而,实际输出的电压矢量Umod对应的q 轴动态电压U'qs_PI为负,实际的q 轴电流向减小的方向变化,从而与预期的动态响应相反,易引起动态电流的紊乱,最终导致电机相电流大幅度振荡。而若永磁同步电机运行在电流约束边界,电流矢量的紊乱还会引发系统过电流停机,对系统的稳定性造成严重影响。同理,图1(b)中的最小幅值误差过调制方法也存在类似的问题。
2 基于动态电压修正的动态过调制策略
根据式(1)~式(3)中的电压方程得知,IPMSM的电压矢量主要由反电动势电压以及动态电压两大部分构成,前者主要取决于电机的运行转速与d、q 轴电流值,其优化空间有限,且无法对IPMSM的动态电流响应进行调节。因此,针对IPMSM 运行于过调制区域存在的电流调节器动态性能严重下降的问题,本节以提高过调制运行的动态响应能力为目标,研究了一种在矢量控制框架下的动态过调制策略。
IPMSM 矢量控制原理如图3 所示,由于在高速运行工况,d、q 轴电流耦合严重,为实现d、q 轴电流的解耦控制,需引入前馈电压解耦,即

图3 永磁同步电机矢量控制系统结构Fig.3 Structure of vector control system of PMSM

式中,ud_ff、uq_ff分别为d、q 轴耦合电压项,为了确保解耦精度,在实际应用中设计了电感与磁链随电流和温度变化的表格,以消除电机饱和效应对解耦精度的影响。d、q 轴电流调节器的输出叠加上耦合电压项作为IPMSM 矢量控制的给定参考电压,经坐标变换后作为SVPWM 与过调制模块的参考电压,经运算后获取IGBT 的驱动脉冲信号。
图3 中的弱磁控制采用电压前馈方法,即给定电压uref与电流环输出电压幅值作差,经PI 控制器得到d 轴补偿电流(id-fw)。对于传统算法,uref通常选取为,对应图4 中的六边形内切圆。为了提高直流母线电压利用率,本文将电压边界设定为如图4 所示的六边形,而在此情况下,动态过程中的过调制发生的频率必然增加,为此本节将重点研究动态过调制策略,以改善六边形电压边界运行情况下的系统动态性能。
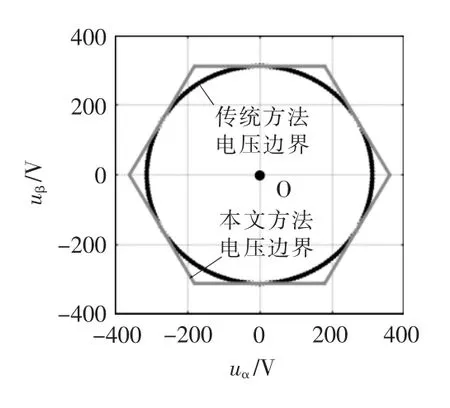
图4 电压边界示意Fig.4 Schematic of voltage boundary
当IPMSM 运行于高调制度区域时,一旦出现转矩或者转速大幅突变工况,则d、q 轴电流给定值会产生较大变化,而电流调节器输出的动态电压随之增大,使得参考电压超出六边形边界,进入过调制状态。从电压分解的角度分析,通过将电机电压矢量拆分为动态电压项与反电动势电压项。进一步,根据式(1)~式(3)可知,d、q 轴电流的导数取决于动态电压项,传统的过调制策略无法保证修正后电压矢量对应d、q 轴动态电压项的符号与修正前相同,会出现d、q 轴电流向着与参考电流相反方向变化的情况,从而导致d、q 轴电流振荡,动态性能恶化。
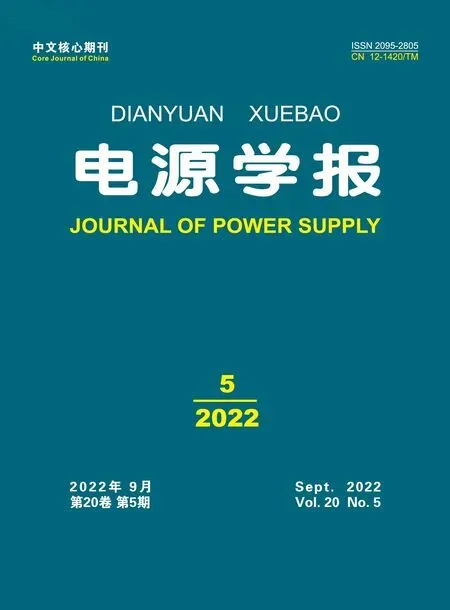
本文所提的动态过调制原理如图5 所示,即选用反电动势矢量与参考电压矢量的终点连线与六边形电压边界的交点作为实际输出电压矢量Umod。图中Uref为修正前的参考电压矢量,是反电动势电压矢量Edqs与动态电压矢量Udqs_PI的矢量和。当参考电压矢量超出限制边界时,保留反电动势电压不变,单独对电流环PI 调节器输出的动态电压进行修正,理论上可以有效改善负载突变(如电动汽车撞击路沿或者腾空)过程中电压矢量不当修正所造成的动态电压矢量反向问题,进而有效缓解传统过调制电压修正策略所带来的电机控制系统动态性能恶化问题。
从图5 所示的动态电压修正过程不难看出:在电压矢量修正过程中,仅调整PI 动态调节电压矢量的幅值,而其方向维持不变,其好处在于能够保持修正前后的d、q 轴动态电压符号不变,确保d、q轴电流向着期望的变化方向运行,因此能够有效克服电压矢量不当修正所造成的电流调节动态性能恶化的问题。
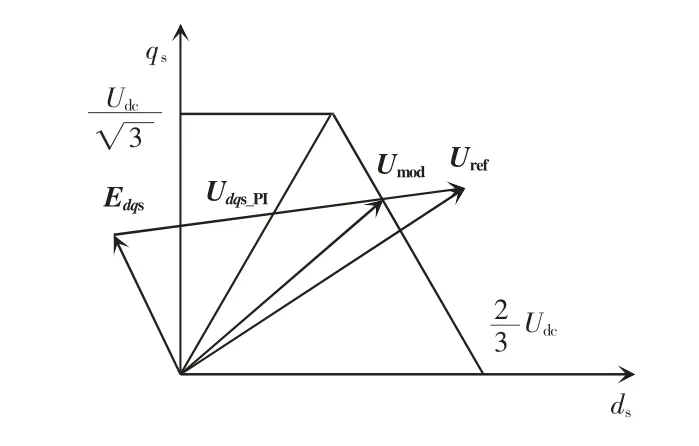
图5 动态电压修正过调制策略示意Fig.5 Schematic of overmodulation strategy based on dynamic voltage modification
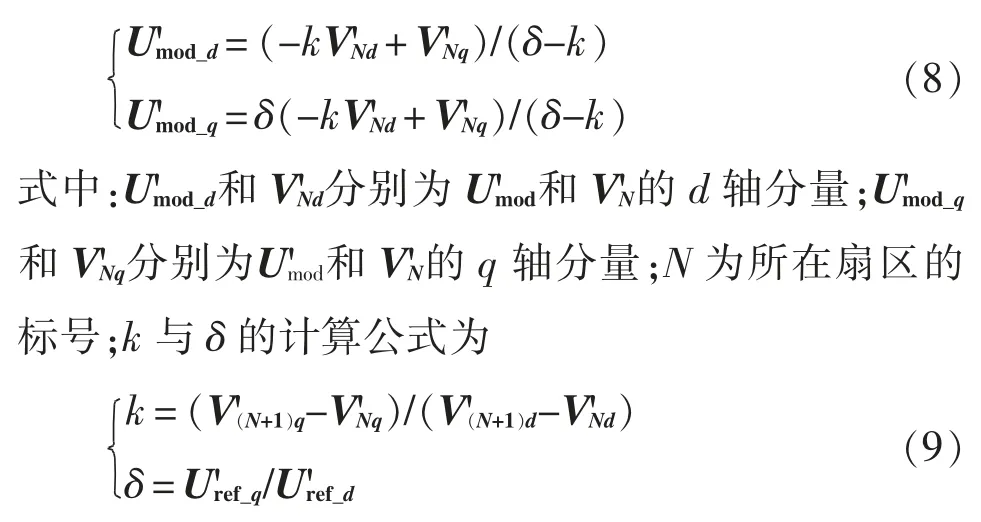
在实际仿真以及实验过程中发现,在现有旋转坐标系下求取Umod的过程,因受到转子位置、六边形电压边界以及反电动势矢量位置等多个因素的影响而变得极为复杂,如果不采取有效方式对电压矢量的修正过程进行简化,算法实现需要耗费巨大的运算量,而且会对芯片的负荷率带来一定挑战。采用坐标系转换的方法可以在一定程度上简化算法,省去大量繁琐的三角函数运算,减轻系统负荷。基于此,本文设计了一种简化的电压矢量处理方式,如图6 所示,以反电势矢量的终点为作新坐标系的原点,构建基于动态调节电压的全新坐标系。图6 中选取反电动势矢量作为坐标原点,构建全新的动态可变α'-β' 坐标系,在新坐标系下参考电压矢量U'ref的坐标满足

图6 简化动态过调制策略示意Fig.6 Schematic of simplified dynamic overmodulation strategy

新坐标系中6 个电压空间矢量(V'1~V'6)的坐标可表示为


表1 输出电压矢量与基本电压矢量的叉积符号Tab.1 Cross product symbols of output voltage vector and basic voltage vector

图7 扇区判断流程Fig.7 Flow chart of sector identification
通过对PI 调节器动态电压矢量进行扇区定位,可以精准解析动态电压矢量的落点信息。新型动态坐标系下,修正后的电压矢量表达式为

以上过程表明,重新构建新的坐标系进行目标矢量的扇区判断,不仅可以避免在扇区过渡区域中动态电压的落点误判断、误处理问题,而且整个流程简便、易操作,可以避免繁琐的三角函数运算,有效减小系统的运算量。
3 仿真与实验结果
为验证本文所述新型动态过调制策略的有效性,在Matlab 中搭建相应的仿真进行算法验证,采用的主要仿真参数如表2 所示。
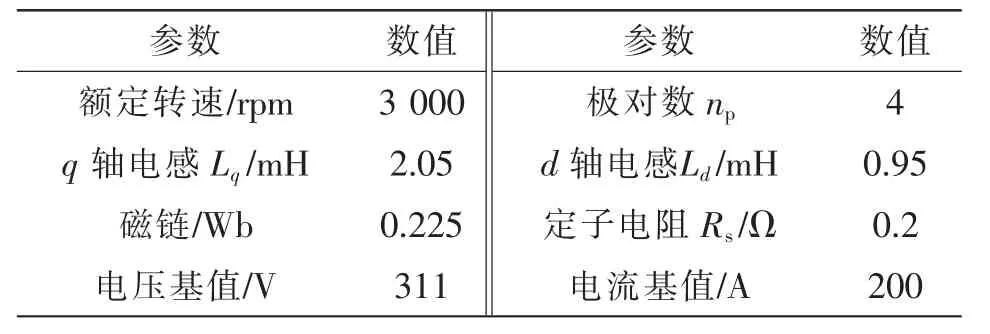
表2 仿真参数Tab.2 Parameters of simulation
电机控制系统的初始状态设定为空载、零速运行,在系统初始化完成且正常运行后,突加从0 r/min到3 500 r/min 阶跃转速指令,使电机转速迅速进入弱磁状态。待系统的转速、转矩和电流等指标稳定后,控制负载转矩完成从0 N·m 至110 N·m 的突变,并观察两个动态工况过程中电机控制系统的各项运行指标。
图8 所示为使用传统最小幅值误差过调制策略下电机转速、转矩过程的仿真波形。

图8 传统过调制策略仿真波形Fig.8 Simulation waveforms under conventional overmodulation strategy
其中,图8(a)为运行工况突变情况下的电机转速波形,观察发现,给定阶跃转速指令的过程中转速会有较大的超调,高速运行过程中突加大负载的情况下转速会产生较大的跌落;图8(b)和(c)分别为上述工况下的电机d 轴以及q 轴电流波形,观察发现,当电机的转速、转矩产生大幅突变的情况下,控制系统的d、q 轴电流都受到了较大影响,有不同程度的紊乱情况,尤其在突加阶跃转速指令的过程中,d 轴电流产生了较大的正向抖动,电流给定与反馈严重偏离;图8(d)为上述工况突变操作过程中电机的电磁转矩波形,与d、q 轴电流的抖动相对应,电磁转矩在工况突变的过程中也产生了较大的抖动。
图9 所示为本文设计的基于PI 调节器动态电压矫正的新型动态过调制策略下的对比仿真波形。

图9 动态过调制策略仿真波形Fig.9 Simulation waveforms under dynamic overmodulation strategy
其中,图9(a)为运行工况突变情况下的电机转速波形,高速状态下突加负载转速抖动明显减小;图9(b)和(c)分别为基于电流环PI 调节器动态电压调节的新型动态过调制策略下的电机d、q 轴电流波形;图9(d)为上述工况突变操作过程中电机的电磁转矩波形,相较传统的最小幅值误差过调制策略,工况突变情况下的转矩改善明显,抖动情况基本消除,整体变化趋势也更加平稳。
对比图8 和图9 发现,本文所述的新型动态过调制策略相较传统策略对于d、q 轴电流波形改善明显,尤其在转速、转矩大幅突变的过程中,d 轴电流紊乱的情况明显改善,正向抖动的情况基本消除,与给定电流的变化趋势基本吻合,且动态持续时间也明显缩短,同时,q 轴电流的抖动情况也有显著改善,变化趋势也更加平滑。
图10(a)为上述操作过程中α-β 坐标系下电压矢量的运行轨迹,已经明显扩展到电压六边形电压边界;图10(b)为1~1.2 s 稳态过程中的调制度曲线,其中调制度定义为IPMSM 定子电压幅值与直流母线电压一半的比值。图10(b)表明调制度在1.153~1.333 之间变化,其平均值约为1.236,比图4中六边形内切圆对应的调制度增加约7.5%,因此本文所提方法能够提高直流母线电压利用率。
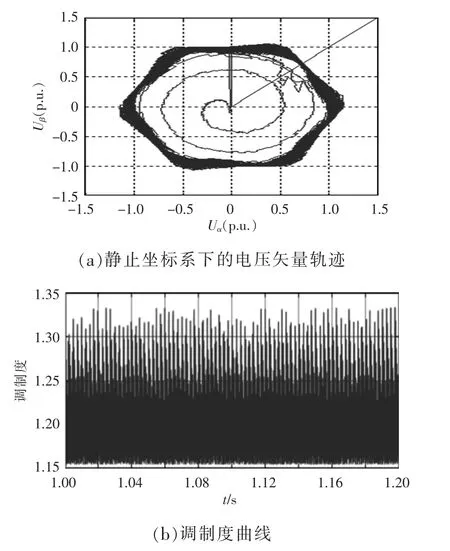
图10 电压矢量轨迹与调制度曲线Fig.10 Trajectory of voltage vector and curve of modulation index
在如图11 所示的对拖实验平台上进行实验验证,以PMSM1 为实验对象,PMSM2 为负载电机。PMSM2 与PMSM1 同轴相连,并通过逆变器2 进行转矩控制。PMSM1 工作在电动状态,而PMSM2 工作在发电状态,并通过可控整流器将能量回馈至电网。图11 中所有的控制器主芯片均采用德州仪器TMS320F28335 型号的数字处理芯片。

图11 实验平台Fig.11 Experimental platform
为验证本文设计的新型过调制策略的效果,选取传统最小幅值误差过调制策略进行对比实验。图12 所示为传统策略下的实验效果,从上到下各条曲线依次为电机转速指令信号及转速反馈信号,旋转坐标系下的q 轴、d 轴反馈电流。观察发现,转速指令大幅突变过程中电机的d、q 轴电流产生了较大的波动,与图8 所示的仿真波形基本吻合,动态过程中电流动态稳定性较差。
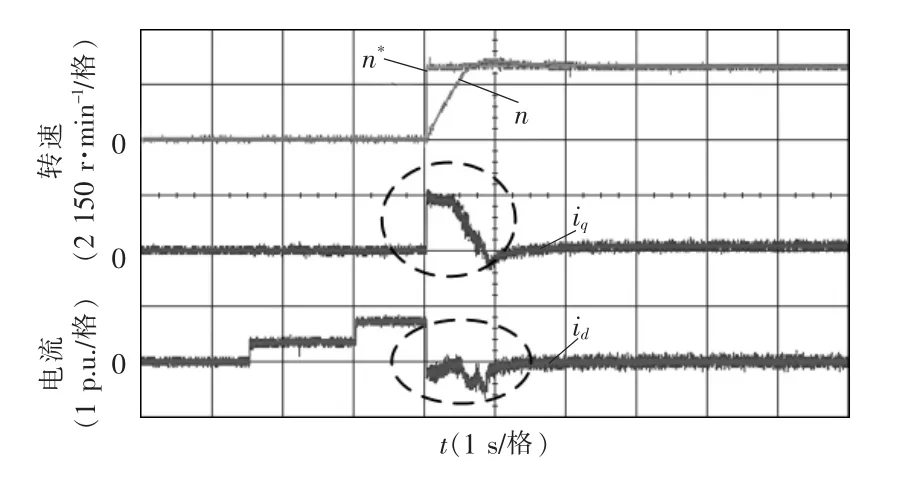
图12 传统过调制策略下电机转速以及电流波形Fig.12 Waveforms of motor speed and current under conventional overmodulation strategy
图13 所示为本文设计的基于PI 调节器动态电压修正的动态过调制策略实验效果。图13(a)完整展示了整个操作过程中转速和d、q 轴反馈电流的变化情况,图13(b)为对应转速突变动态过程中d、q 轴反馈电流的细节。

图13 新动态过调制策略下电机转速以及电流波形Fig.13 Waveforms of motor speed and current under novel dynamic overmodulation strategy
图14 所示为负载转矩由50 N·m 突变至100 N·m 情况下的d、q 轴电流响应波形,可见d、q 轴电流响应平稳,不存在振荡现象,且具有较好的动态性能。因此,相较于传统策略,本文设计的新型动态过调制策略对于电流的动态性能改善明显,工况突变情况下电流抖动基本消除,变化趋势也趋于平滑。

图14 负载转矩突变工况下动态过调制策略的电流响应波形Fig.14 Waveforms of current response under dynamic overmodulation strategy with sudden change in load torque
4 结语
本文首先对传统的过调制策略进行了策略特点以及性能分析,分析结果表明传统过调制算法未对系统的动态性能进行优化。针对此问题,设计了一种基于PI 动态电压修正的动态过调制策略,以优化d、q 轴电流的动态响应为目标,在保留原有电压矢量反电动势不变的基础上,有针对性地对单独针对电流调节器输出的动态电压进行修正,并提出对应的简化算法。在Matlab/Simulink 仿真环境中搭建电机控制系统模型,对基于动态电压矢量修正动态过调制策略的永磁同步电机矢量控制系统进行仿真。仿真结果表明,本文所述动态过调制策略能够有效优化系统工况突变且进入过调制状态时的动态性能。实验结果对文中所述控制策略的正确性与可行性进行了有效验证。
猜你喜欢
防爆电机(2022年2期)2022-04-26
快乐语文(2021年35期)2022-01-18
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
航空世界(2018年12期)2018-07-16
电机与控制学报(2018年9期)2018-05-14
新高考·高一物理(2016年1期)2016-03-05