基于通用电源模块的卫星用分布式电源系统设计
2022-10-13 03:12佟强,曲璐,刘贺
电源学报 2022年5期
佟 强,曲 璐,刘 贺
(深圳信息职业技术学院智能制造与装备学院,深圳 518172)
传统的航天器电源系统中的电源控制器PCU(power conditioning unit)通常采用集中式控制架构,集中式供电具有功率密度高、输入输出电缆数量少,电源系统设计简单等优势,但是也存在着内部功率变换模块种类多、冗余度低、热应力高、灵活性差等缺点。在航天应用中,定制化产品的占比越来越高。集中式供电的电源控制器由于其灵活性差,不适合定制化的使用需求。目前航天器供配电电源系统正朝着货架式、低成本、高可靠性的方向发展。而分布式架构有利于形成货架式产品,模块化的积木组合形式可以快速构成所需的电源系统。因此,模块化、高可靠性的分布式供电系统DPS(distributed power system)已成为航天器供配电体制的一个重要发展方向[1-7]。
本文从分布式航天器电源系统架构出发,提出了一种通用的数字控制、可模块化拓展的功率变换模块。该模块通过软件控制可实现不同的功率变换功能,从而大大缩减了电源系统中功率变换模块的种类,提高了开发效率和应用的灵活性。在详细分析分布式电源系统工作状态和控制需求的基础上,本文提出一种系统的功率控制策略,并进行了实验验证。
1 分布式电源系统架构
图1 给出了传统的航天器集中式供电系统和本文所提的分布式电源系统。图1(a)为基于顺序开关分流(S3R)架构的集中式供电系统,主要由PCU 和若干DC/DC 电源变换器构成。其中PCU 起到稳定一次母线电压的作用它由若干个不同功能的电源变换模块构成,包括了分流调节器、蓄电池电池充电调节器、蓄电池放电调节器等,它们在母线误差放大器的控制调节下工作,处理太阳能电池阵列、蓄电池组和直流母线三者的功率流向。
集中式电源系统这种架构的缺点包括:①研制成本高,PCU 中包含的功率调节器种类较多,每种都要单独设计、制造和测试,增加了研制难度、周期和成本;②可扩展性差,设计一旦定型后,很难再做功率和性能等方面的扩展,可应用的范围窄;③通用性差,不同的航天器在电功率、体积、结构等方面均有不同,这就导致产品的通用性差,针对不同的航天器需要专门定制不同的PCU;④可靠性低,单个功能模块的失效会对整个电源系统带来致命的影响。由此可见,集中式电源系统无法适应要求功率可扩展、可快速匹配以及高可靠性等新型号任务的需求,研究分布式电源系统势在必行。
图1(b)所示为本文所提出的一种航天器分布式供电系统单元的架构。对比图1(a)和(b)中黑色虚线框所含的范围可见,图1(b)的分布式电源系统架构的优势包括:①模块种类显著减少,只采用一种通用电源模块即可实现传统集中式供电系统中多种模块的功能,降低了开发成本;②可扩展性强,通过在直流功率总线上添加模块的数量即可扩展整体功率。采用多个分布式的通用电源模块组网来取代传统的集中式电源控制结构,不仅极大降低了热处理难度,同时也能有效提高太阳能帆板等发电设备的布片率和布片灵活性,并且支持外接燃料电池、锂电池包、飞轮储能等多种能源,而能源结构的多样性使得整个系统的抗毁伤能力显著加强,单个能源失效后,其他能源还可以继续为系统供电;③通用性好,可以形成标准的可货架式采购的功率模块,不同型号任务可根据需求采购不同数量的模块,然后进行拼装组合;④可靠性高,避免了单点失效问题,单个模块出现故障后可以和主母线快速隔离,只影响局部的功率变换,防止了故障蔓延或引起整个系统的故障。该分布式电源系统中除了具有功率母线之外还有通信母线,可以将各个通用电源模块与星载计算机相连,除了能接收行在计算机的指令还可以将自身状态发给计算机,实现整个功率系统的智能管理。
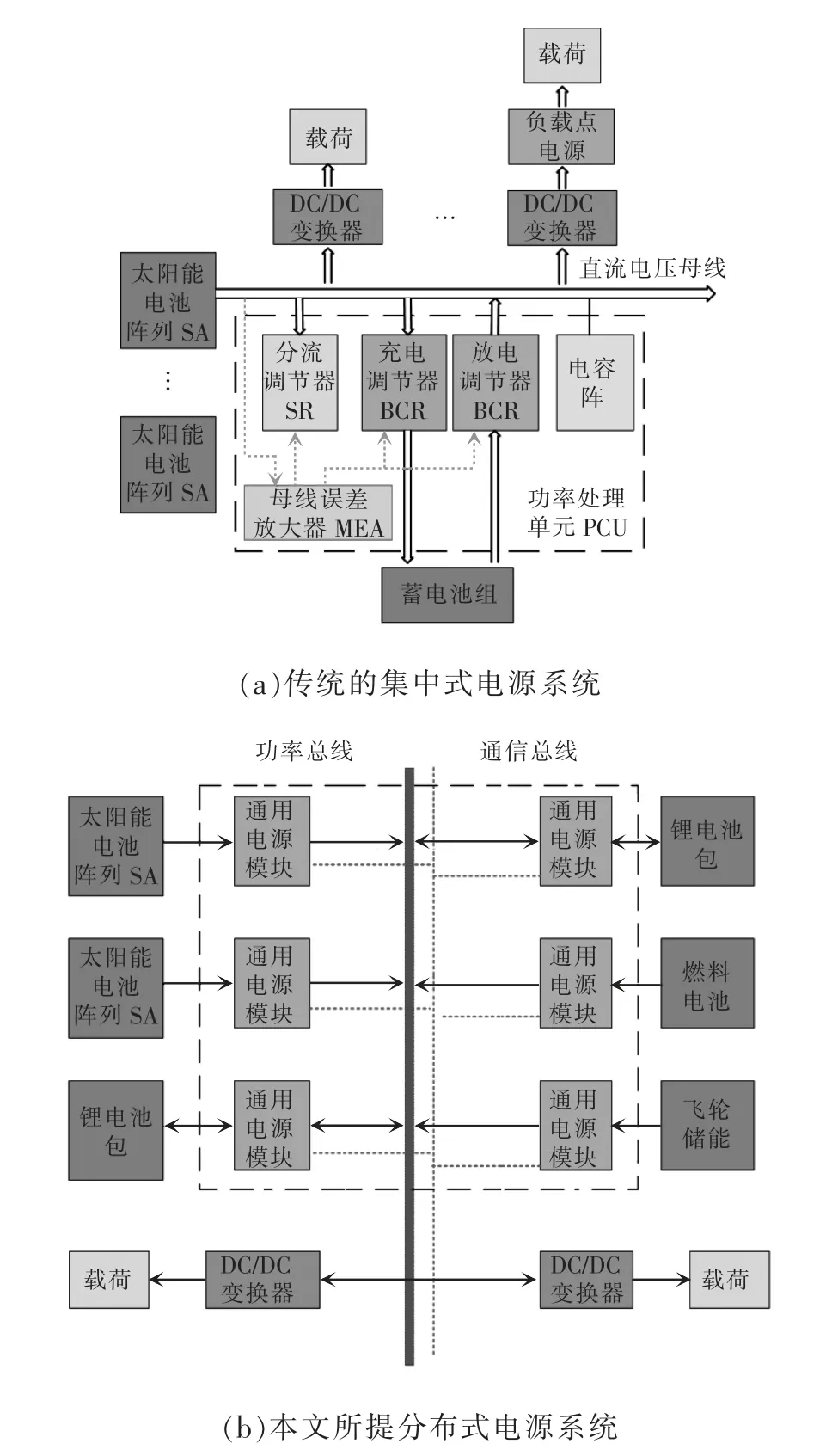
图1 航天器电源系统架构Fig.1 Architecture of spacecraft power system
2 通用电源模块设计
在本文所提分布式电源系统中,通用电源模块起到十分关键的作用。当其外接太阳能电池阵列SA(solar cell array)的时候,工作模式设定为太阳能阵列功率调节APR(array power regulation)模式,可称其为APR 模块,它将太阳能帆板的能量转换到卫星母线,给母线上的二次电源设备供电,在能量充足的情况下,还可将多余能量用于给储能设备充电。与图1(a)中S3R 架构下的并联分流调节器相比,本文架构的显著优势是,通过串联功率调节器的形式,将太阳阵列与整星的直流母线相隔离,可以兼容更多类型的太阳能阵列,提供更广泛的适应性。此外本文架构还可以实现最大功率点跟踪MPPT(maximum power point tracking),确保太阳能电池阵列工作在最佳工作区。当其外接锂离子电池时,工作模式设定为电池充放电BCDR(battery charge and discharge regulator)模式,既可以对储能电池进行充电,也可以在其他外接能源供电不足时,控制电池反向放电,维持母线电压的稳定。此外,还可以通过此通用电源模块外接燃料电池、飞轮等储能设备,实现对整星母线的供电,甚至还可以通过此通用模块为其他载荷设备供电。若使通用电源模块具备上述多样性的功能,必须对其拓扑结构和控制方式进行合理的设计和选择,这也是本文的重点内容。
2.1 拓扑结构设计
通用电源模块在拓扑上要具备的能力包括:升降压控制、双向电流流动、高转换效率、易于控制等。常见的非隔离升降压拓扑主要有:Sepic/Zeta 拓扑、Buck/Boost 拓扑及四开关Buck-Boost 拓扑。四开关Buck-Boost 拓扑具有结构简单、转换效率高,所用元器件较少和两端电压极性相同等优点,因而本文采用了四开关Buck-Boost 作为APR 模块拓扑结构,如图2 所示。

图2 四开关Buck-Boost 拓扑示意Fig.2 Schematic of four-switch Buck-Boost topology
四开关Buck-Boost 升降压拓扑有3 种工作模式:①Buck 模式,输入电压高于输出电压,开关管Q3长通,开关管Q1、Q2完成降压转换功能;②Buck-Boost 模式,输入电压和输出电压接近,开关管Q1、Q2、Q3、Q4都开关工作;③Boost 模式,输入电压低于输出电压,开关管Q1长通,开关管Q3和Q4完成升压转换功能。其升降压的工作状态可根据太阳能电池阵列的输出电压和母线电压的关系自动切换。
针对四开关Buck-Boost 的3 种工作模式,常用的控制方式是依据不同的计算公式来分别产生Buck 和Boost 拓扑的占空比,这种方式的缺点是:控制电路相对复杂;在模式转换时输出电压会有毛刺;随输入电压上升或下降,变换器存在2 条不同的效率曲线,路径不可回溯。因此,为了保证从任一输入电压开始,四开关Buck-Boost 拓扑的性能能够保持完全一致,本文中采用了占空比固定差值法来实现3 种模式之间的转换。基于四开关Buck-Boost占空比固定差值法示意如图3 所示,在Buck-Boost模式下,分别设置Buck 占空比和Boost 占空比的上下限值,同时保证Buck 与Boost 的占空比为一个固定差值,从而保证从任一输入电压开始,路径都可以回溯。
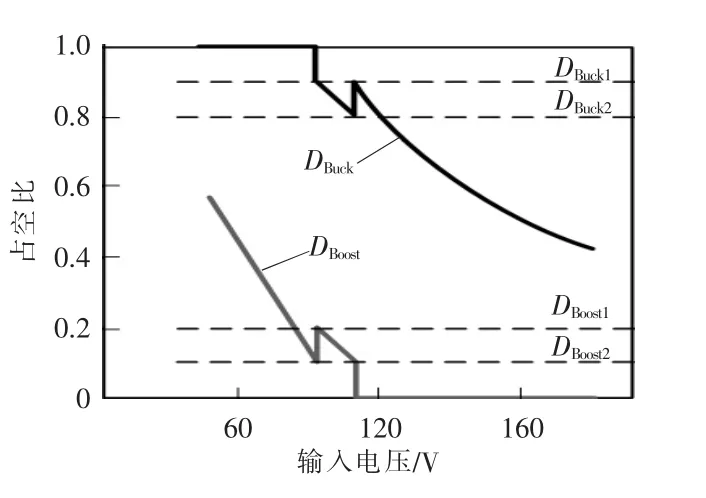
图3 基于四开关Buck-Boost 占空比固定差值法示意Fig.3 Schematic of constant duty cycle difference method based on four-switch Buck-Boost
2.2 控制方法设计
在拓扑方式满足通用电源模块的使用需求之后,还需要与之匹配的控制方式,使得同一套硬件设备能够通过不同的软件设定其功能,满足分布式电源系统中多种功能模块的功能要求。
2.2.1 模块的控制算法
1)最大功率点调节模式
当太阳电池阵输出功率小于等于负载需求时,APR 模块工作于最大功率点调节模式。4 种常用的MPPT 算法分别为:扰动观察法P&O(perturb and observe)、增量电导法(incremental conductance)、分数开路电压法(fractional open-circuit voltage)和分数短路电流法(fractional short-circuit current)[8],其中扰动观察法是最常用的MPPT 算法之一,具有易于实现且有效的优点。因此选用扰动观察法作为功率调节模块的MPPT 算法。
扰动观察法实现的数字控制逻辑流程如图4所示,图中Pk为当前功率读数,Pk-1为上一功率读数。当太阳能电池板的电压稍微增加,将导致太阳能电池板的功率增加,然后执行相同的方向扰动;当太阳能电池板电压的增加降低了光伏板功率,则在反方向上进行扰动,以略微降低太阳能电池板电压。通过改变变换器的占空比来完成扰动太阳能电池板的电压。
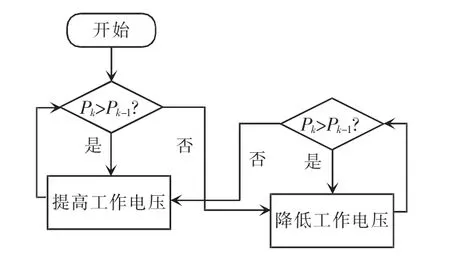
图4 扰动观察法的逻辑流程Fig.4 Flow chart of logic of perturb and observe method
2)稳压调节模式
当太阳电池阵功率输出大于负载需求时,APR模块工作于稳压调节模式。由于APR 模块存在多个模块并联输出的情况下,因此在稳压调节模式的设计中需要加入并联均流控制算法,常见的均流算法主要包括集中式控制、主从式控制、平均电流控制和下垂控制,由于各APR 模块之间要实现分布式工作,且各模块要求完全一致,因此选用开环控制方式-电压下垂法作为并联均流算法[9]。
如图5 所示为电压下垂法的电路原理示意,对输出电流Io和输出电压Vo分别进行采样放大,叠加后送到运算放大器的反向输入端,与基准电压参考电压)Vref比较后输出误差放大信号Vc。随着电源输出电流的变化,Vc将作相应变动,通过调节占空比D 来自动调节APR 模块的输出电压Vo,使其接近其他模块的外特性,实现近似均流[10]。

图5 电压下垂法电路示意Fig.5 Schematic of circuit of voltage droop method
2.2.2 BCDR 模块的控制算法
储能及管理模块由BCDR 模块和储能模块两部分构成,它的作用是在系统能量充裕时给储能装置充电,在系统能量不足时储能装置对母线放电,保证母线工作电压和品质[11-12]。
1)功率双向流动算法
BCDR 模块既可以工作在电池充电模式(正向工作),也可以工作在电池放电模式(反向工作),因此需要对BCDR 模块的双向功率流动算法进行设计。本文中BCDR 模块的功率双向流动控制算法通过检测母线电压作为判断依据,其BCDR 模块双向工作转换逻辑流程如图6 所示。当母线电压Vbus大于一定值(如V2)时,说明此时系统能量充足,BCDR 模块正向工作,给电池充电储能。当检测到母线电压Vbus小于一定值(如V2-ΔV)时,说明此时系统能量不足,BCDR 模块反向工作,电池放电向母线提供能量。

图6 BCDR 模块双向工作转换逻辑流程Fig.6 Flow chart of logic of bi-directional working switching in BCDR module
2)电池充电算法
当BCDR 模块工作于电池充电模式时,为了延长电池使用寿命,通常采用恒流(CC)转恒压(CV)的算法对电池进行充电。锂离子电池充电分为3 个阶段[13]:第1 阶段为预充电阶段,仅在电池深度放电时发生;第2 阶段为恒流充电,在此阶段电池电压逐渐上升;第3 阶段为恒压充电,当恒流充电使电池达到预设电压时进行恒压充电,此时电池的充电电流逐渐减小。当电池的充电电流小于0.01C 时,可认为电池已经充满电,停止对电池的充电。
3)下垂均流算法
在系统能量不足时,储能装置对母线放电,由于BCDR 模块存在多个模块并联输出的情况下,因此BCDR 模块在反向工作时需要加入并联均流控制算法,同样采用图5 所示的电压下垂法作为并联均流算法。
3 分布式电源系统工作模式及策略分析
本文根据太阳能电池阵列、锂电池组的工作状态以及母线负载功率需求,对系统的工作模式进行分析,并对应设计电源系统的控制策略,实现母线电压的稳定。分析航天器电源系统有如下4 种工作模式。
1)工作模式1
太阳能帆板能量足够,能够满足母线负载和储能装置的充电需求,则APR 模块都工作在下垂稳压模式,BCDR 模块工作在电池充电模式。在工作模式1 中采取的控制策略依据BCDR 模块的功率双向流动算法:当母线电压大于100.1 V 时,BCDR模块对锂电池进行充电控制。
2)工作模式2
当太阳能电池阵可以满足负载功率需求,但不能完全满足充电功率需求时,APR 模块工作在最大功率点控制(MPPT)模式[14-15],由BCDR 模块对母线电压和充电进行控制。在工作模式2 中锂电池的充电电流大小由母线电压进行间接控制,可设计2 档充电电流。当母线电压较低时,比如100.2 V,BCDR模块以小电流给锂电池充电;当母线电压较高,比如100.4 V 时,BCDR 模块以设置的最大电流给锂电池充电。
3)工作模式3
太阳能帆板能量不能满足母线负载功率需求,所有APR 模块都工作在MPPT 模式,由BCDR 模块对母线电压和放电进行控制。在模式3 中采取的控制策略是依据BCDR 模块的功率双向流动算法:当太阳能帆板能量不够时,母线电压会出现跌落,当母线电压小于100 V 时,BCDR 模块反向工作,对锂电池进行放电控制。
4)工作模式4
在地影期,太阳能电池阵无功率输出,APR 模块不工作,由BCDR 模块对母线电压和放电进行控制。
4 分布式电源系统搭建与实验结果
为验证所提出的分布式航天器供电系统架构及控制方法的有效性,基于6 个APR 模块和2 个双向BCDR 模块搭建了分布式电源系统,每个功率模块的功率为500 W,整个电源系统的功率可达4 kW,分布式电源系统演示样机如图7 所示。
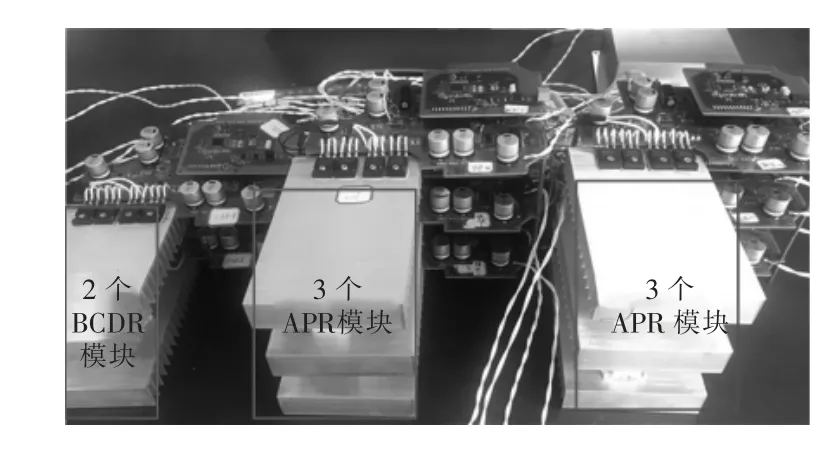
图7 分布式电源系统演示样机Fig.7 Demo prototype of distributed power system
分布式航天器电源系统的主要元器件见表1,采用DSP 芯片完成对通用电源模块的数字控制。
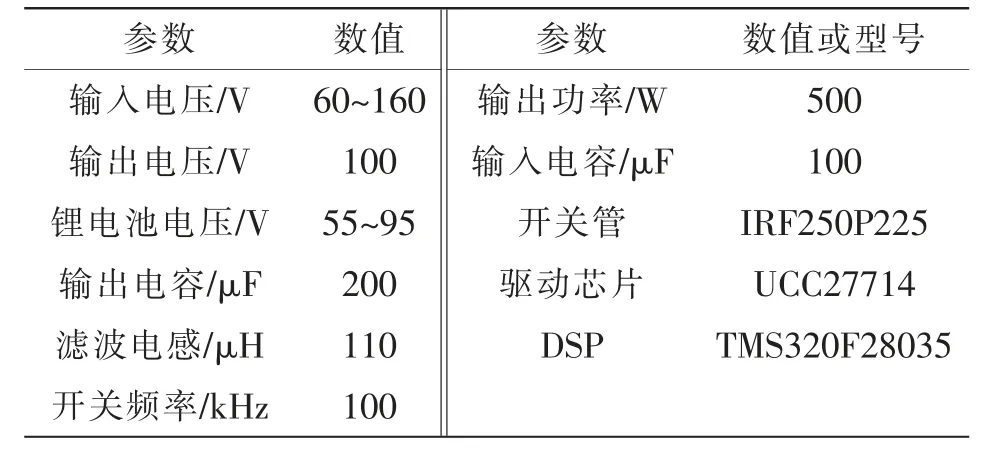
表1 分布式航天器电源系统主要参数指标Tab.1 Key parameters of distributed spacecraft power system
图8 所示为单APR 模块在输入电压60~160 V,输出100 V@7 A 下的工作模式和对应的效率曲线。APR 模块有3 种工作模式,在90~110 V 电压输入时以Buck-Boost 模式工作。由于4 个开关管均工作,因此在该模式下效率略低。
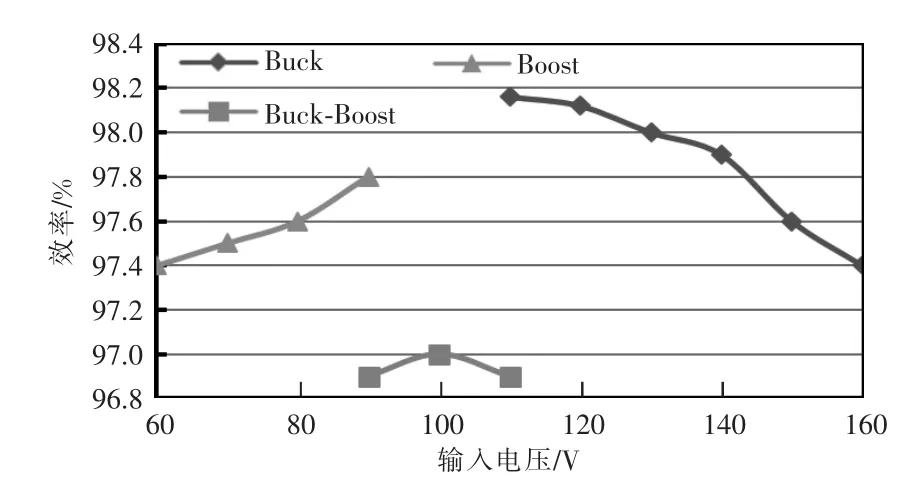
图8 APR 模块效率曲线Fig.8 Efficiency curve of APR module
随着母线负载电流Iload的逐渐增大,分别对6个APR 模块和2 个BCDR 模块的输出电流、母线电压Vbus进行测试,分布式航天器电源系统的测试数据如表2 所示。
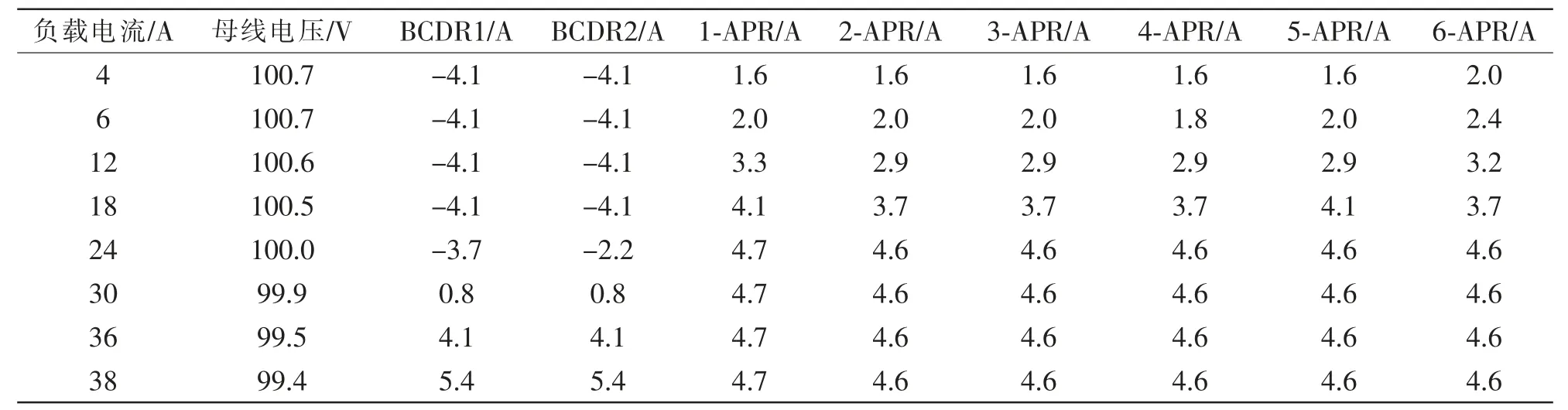
表2 分布式航天器电源系统测试数据Tab.2 Test data of distributed spacecraft power system
其中每个太阳能电池阵的最大功率点设置为Vmp=110 V,Imp=4.5 A;初始阶段负载电流较小,2 个BCDR 模块以设定的4 A 充电电流对电池充电,6个APR 模块以下垂均流稳压模式工作,6 个APR模块的电流基本接近。当负载电流增大到24 A 时,6 个APR 模块均进入MPPT 模式工作,此时2 个BCDR 模块的充电电流减小;当负载继续增大到30 A 时,2 个BCDR 模块开始反向工作,电池放电来保证母线电压平稳。经计算可得在整个负载电流变化范围内,母线电压的稳定度为1%以内,满足规范指标要求。
图9 为系统在工作模式1 与工作模式2 之间动态切换的实验波形,即BCDR 工作在充电状态下,APR 模块由稳压控制切换到MPPT 控制的实验波形。将负载设置为28 A,有部分APR 模块工作在MPPT 模式,部分APR 模块工作在均流稳压模式,此时母线电压100.4 V,母线电压的上冲和下陷幅值小于3%。
图10 所示为系统在工作模式1 与工作模式3之间切换的实验波形,即APR 模块由稳压控制切换到MPPT 控制电池,BCDR 模块由充电控制切换到放电控制的实验波形。将负载设置为38 A,6 个APR 模块工作在MPPT 模式,BCDR1 与BCDR2 放电电流均为3.7 A,此时母线电压99.4 V,母线电压的上冲和下陷幅值在3%左右。
表2、图9 及图10 验证了分布式供电系统能够稳定工作在不同工况下,并且实现不同工作模式下的自然切换,验证了以APR 模块和BCDR 模块为基本单元构建的航天器分布式供电系统及其功率控制方法的可行性和有效性。

图9 工作模式1 与工作模式2 切换时母线电压波形Fig.9 Waveforms of bus voltage during switching between working modes 1 and 2

图10 工作模式1 与工作模式3 切换时母线电压波形Fig.10 Waveforms of bus voltage during switching between working modes 1 and 3
5 结语
本文采用了基于数字控制的通用功率转换模块实现了分布式星载分布式电源系统,该模块具有统一的硬件设计,通过软件的调整可实现不同的功率变换功能。通过此架构提高了星载电源系统的冗余度、可靠性和灵活性。本文还给出此分布式电源供电系统的工作模式和控制策略,并通过实验验证了该控制策略的有效性。系统可在4 种工作模式之间可以平滑稳定地切换,并使母线电压达到较好的稳态和瞬态性能。
猜你喜欢
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
电子制作(2019年22期)2020-01-14
阅读(快乐英语高年级)(2019年2期)2019-09-10
课程教育研究·学法教法研究(2018年20期)2018-08-11
制导与引信(2017年3期)2017-11-02
中小学实验与装备(2016年6期)2017-01-19
风能(2016年12期)2016-02-25
燕山大学学报(2015年4期)2015-12-25
汽车电器(2014年5期)2014-02-28