低轨卫星电源系统锂离子电池组主被动混合均衡拓扑
2022-10-13 03:12李卿鹏刘子祎靳晓光
电源学报 2022年5期
李卿鹏,杨 琴,段 鑫,刘子祎,靳晓光
(1.国网南昌供电公司,南昌 330000;2.浙江大学电气工程学院,杭州 310027)
由于单节锂离子电池的电压较低、容量较小,用于卫星系统的储能器件时必须将多节单体电池进行串并联组合,以提高其开路电压和放电功率[1-2]。电池单体在制造过程中,由于工艺原因其本身会存在一些电气特性差异,这些差异在使用过程中会被逐渐放大。即使锂离子电池组中电池单体之间在出厂之前都经过了精细挑选,使其各项性能(如容量、内阻等)尽量保持一致,但在使用过程中,也会由于工作温度和电路参数的微小差别,随着电池单体老化而使差异逐渐扩大,比如对高电压、大电流的承受能力、内阻和自放电率等[3]。如果不进行有效均衡管理,锂离子电池间的一致性在循环使用过程中会呈发散趋势,使个别性能较差电池单体衰减加速甚至失效,从而使电池组整体特性变坏,影响整个锂离子电池组的性能和寿命[4]。
在储能系统中,锂电池均衡器占有很重要的地位,肩负着提高电池组可靠性和延长电池组寿命的重要职责。从本质上讲,电池的均衡过程就是电池单体电量“削峰填谷”的过程,可以通过能量耗散实现,也可以通过能量转移实现。目前研究过的锂离子电池均衡器种类繁多[5-11],按照不同拓扑结构[12]、不同的载能器件[4]或不同的能量转移路径[1,13]有很多分类方法。
被动均衡技术由于结构简单、控制容易等优点[14-15],在直流母线卫星电源系统中占绝对主要地位[16-17]。但是,被动均衡有热设计复杂的缺点,而且往往仅在电池充电时均衡,会导致电池单体放电深度不能得到一致控制,从而影响电池组寿命。
主动均衡技术具有较高的效率和均衡速度,而且可以采用智能化的控制方法,是锂离子电池均衡技术的主流发展方向[1,3,4,18,19]。但是主动均衡技术往往需要大量的开关和储能器件,控制算法复杂,存在体积大以及可靠性低的缺点[20-21]。现有的大多数主动均衡技术还不能直接应用于直流母线卫星电源系统[22-23]。
根据卫星电源储能蓄电池的工作特性,提出卫星用锂电池均衡系统的需求原则,筛选与评价现有均衡技术,挑选可行性拓扑进行改进,与现有卫星电源电池管理系统BMS(battery management system)融合,并最大程度地保障和提高锂电池的可靠性,不仅具有理论意义也具有应用价值。
本文提出一种基于开关矩阵的主被动混合均衡拓扑,具有结构简单、控制容易、可靠性高的优点,适用于低轨卫星储能系统应用。
1 拓扑构建思路及结构
基于开关矩阵的主被动混合均衡拓扑是根据低轨卫星储能系统的储能特点,将充电均衡和放电均衡分离开来,对子集里拓扑做组合而成。构建思路如下。
(1)低轨卫星轨道周期短[16]。低轨卫星轨道周期为100 min 左右,光照时期也短,在1 h 左右。锂电池组可充电时间短,需要在短时间内保持大电流充电,迅速存储电能。在大电流情况下采用旁路电阻均衡更简单高效。如果用主动均衡,必须要大功率隔离变换器,反而低效,而且影响可靠性。另外,在光照阶段,卫星上太阳能电池设计功率要大于系统需求功率,母线调节器会将多出的太阳能电池短路,使电能转化为热能辐射到太空中。所以充电均衡不需要考虑效率问题,被动均衡足以满足要求。
(2)锂电池充放电循环周次多[23]。低轨卫星每年有5 000 多次地影期,充放电循环对蓄电池寿命影响非常大,锂电池单体循环寿命只有1 000 次左右。被动均衡只能做到充电均衡,虽然低轨卫星很少有完全放空电池的情况,但是在放电时加入主动均衡能有效控制锂电池的放电深度,保持各电池单体衰减一致,优化锂电池组的寿命。特别是在卫星设计寿命末期,太阳能电池和锂电池组都衰减到一定程度时,放电均衡可以最大限度挖掘电池组内存储的能量,维持卫星系统正常运行。主动均衡可以采用小功率设计,均衡电流采用C/5 左右即可达到很好效果。
基于开关矩阵的主/被动混合均衡拓扑结构如图1 所示,其中被动均衡采用并联分流电阻拓扑,主动均衡部分选择基于开关矩阵的反激拓扑。在充电时,被动均衡起作用,在待机或者放电时主动均衡起作用。

图1 基于开关矩阵的主被动均衡拓扑Fig.1 Switch-matrix based active-passive equalization topology
2 工作原理
图1 的左侧为反激均衡变换器,变换器输入为电池组电压,输出连接开关矩阵均衡端口;右侧为开关矩阵和被动均衡,R4~R9为旁路电阻。由于被动均衡也包含开关结构,本文把图1 中虚框内结构统称为开关矩阵。
2.1 开关矩阵的驱动
每个电池单体连接一个开关矩阵基础单元,如图2 所示。每个基础单元由5 个金属氧化物半导体场效应晶体管MOSFET(metal-oxide-semiconductor field-effect transistor)组成。图2(a)所示为N 沟道基础单元,其中背靠背MOSFET(Qn_a~Qn_d)构成双向开关,每个电池单体对应的两个双向开关共用驱动,在电路中同时导通,使电池单体接入均衡通路,接下来可以采样该电池电压,或者对该电池单体进行均衡,这种均衡只发生在电池组待机或者放电时。电池右侧开关管Qn_e导通则使旁路分流电阻RN并入电池回路,对该电池单体进行充电均衡。由于电池组由电池单体串联而成,开关矩阵中开关管相对电位不一致,最少需要n 路隔离驱动电源。如果采用辅助电源方案,则变压器绕制工艺较为复杂,可靠性不高。采用电池自驱动技术,用高位的电池来驱动低位MOSFET 开关,这样最高位开关矩阵单元没有电池可以驱动。最高位开关则需要用低位电池驱动,所以开关矩阵中引入P 沟道基础单元,如图2(b)所示,P 沟道单元的5 个开关管均为P-MOSFET,可以采用低位的电池电压驱动。图中BN和BP分别指N 沟道单元和P 沟道单元对应的锂电池单体。虽然两种基础单元等效电路和功能一样,但由于P 沟道MOSFET 的物理结构导致其导通电阻(RDSon)相对同等级N 沟道MOSFET 高一些,而且P-MOSFET 型号较少,选择余地小,所以实际应用时开关矩阵中P 沟道基础单元越少越好。以16个电池单体串联电池组为例,只在最高两位使用了P 沟道基础单元,即B16和B15对应矩阵单元用PMOSFET。下文详述2 种单元的驱动方式。
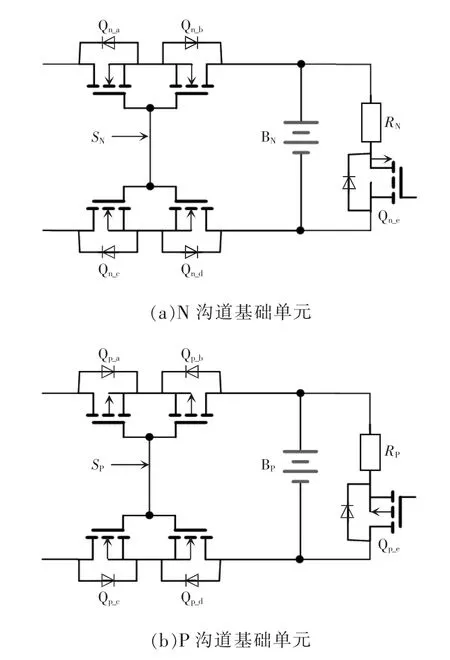
图2 开关矩阵基础单元Fig.2 Basic units of switch-matrix
图3 给出了旁路电阻开关的驱动,低位N 沟道MOSFET 由比它高两位的电池电压驱动,高位P 沟道MOSFET 是由比它低两位的电池电压驱动,驱动信号均由光耦隔离。驱动电流通路如图中虚线所示。
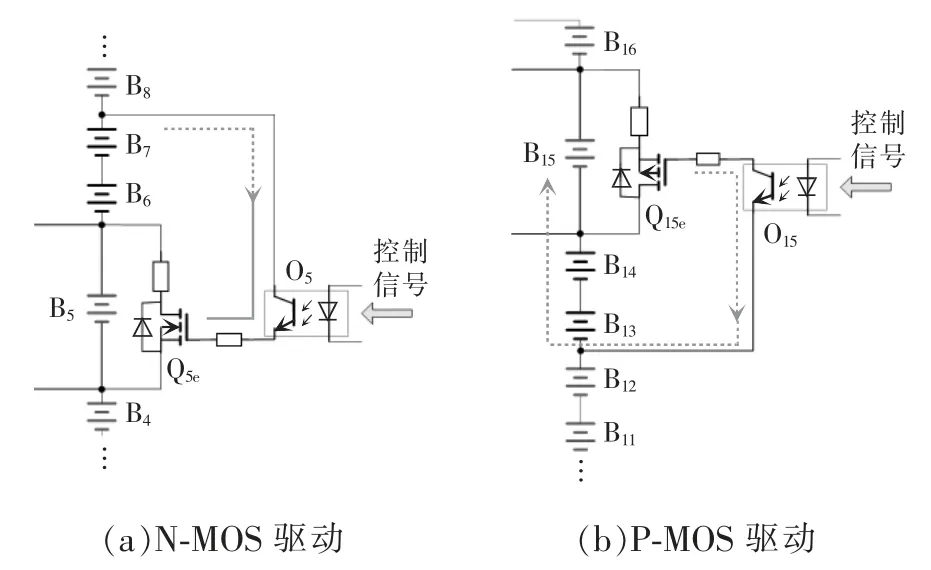
图3 旁路电阻开关驱动形式Fig.3 Bypass resistor switch driver
图4 给出了开关矩阵中双向开关的驱动电路,同一个电池单体上两个双向开关共用一个驱动信号,同时导通关闭。驱动方式与旁路电阻开关相同,N 沟道MOSFET S5通过光耦O5由它上面第三个电池B8电压来驱动,P 沟道MOSFET 双向开关S14则通过光耦O14由它下面第三个电池单元B11提供下拉驱动。驱动电流通路如图中虚线所示。
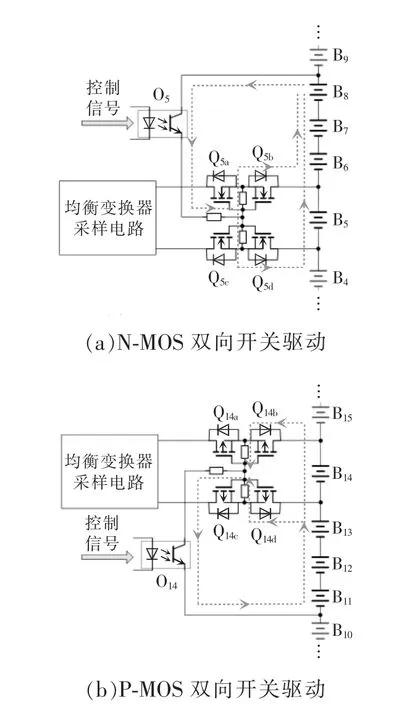
图4 双向开关驱动形式Fig.4 Bidirectional switch driver
2.2 均衡变换器设计
均衡变换器采用反激拓扑。变换器的输入为电池组电压,以16 串电池组为例,则输入范围为54~65 V,输出被电池组最低单体电压箝位。通常变换器充电电流越大均衡所用时间越短,但考虑到元器件应力裕量以及系统体积,变换器的设计功率需与所能接受的均衡时间之间做一个平衡。并且,功率过大会影响电路散热设计,功率太小则无法反映均衡效果。假如电池组放电时间为120 min,则设计均衡变换器能在120 min 内将电池发散度降为原来的一半为宜。均衡反激变换器的结构如图5 所示。
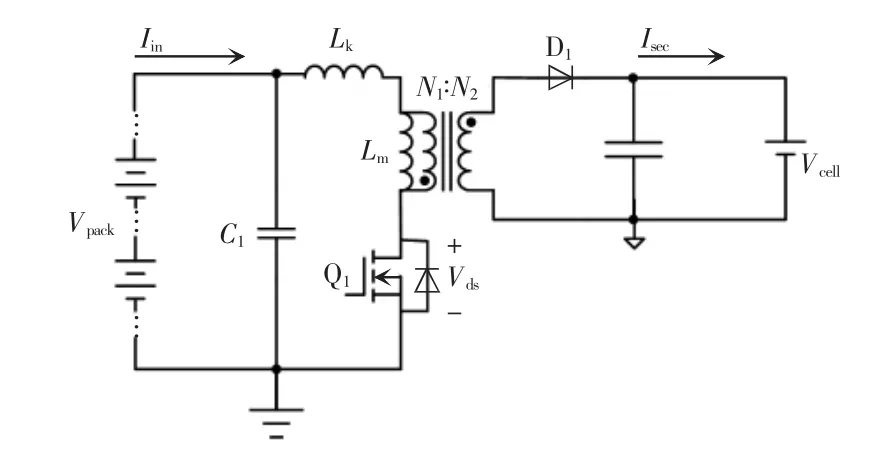
图5 均衡反激变换器Fig.5 Flyback converter for equalization
反激变换器的变压器主要起3 个作用:①实现电气隔离;②通过调节变比实现电压匹配;③作为电感存储能量。因为涉及到系统的稳定性,在设计时电磁干扰问题要比系统效率具有更高优先级。考虑到反激变换器在电流断续模式DCM(discontinuous conduction mode)时输出二极管D1的反向恢复电流在再一次开通之前已经变成0,从而抑制振铃现象所造成的电磁干扰EMI(electromagnetic interference)问题,所以在系统中,所设计变换器工作在电流断续模式。工作波形如图6 所示,其中,Vg为原边开关管驱动、V2为变压器二次侧电压、Iin为一次侧开关管电流、Isec为变压器二次侧电流。

图6 电流断续模式波形Fig.6 Key waveforms in DCM mode
在设计中,首先从给定数据如输入电压Vpack、输出电压Vcell、输出功率Po和变换器效率η 等,确定相应的器件开关容量、电路电感量及变压器磁芯尺寸和匝数比。
输入电流平均值Iin为

当电路工作在DCM 时,输入电流峰值为

开关管Q1的电流峰值等于输入电流峰值,即

开关管Q1的正向阻断电压Vdsm为

二极管D1的反向阻断电压VDm为

变压器二次侧电流峰值为

若希望电路在整个工作范围均以DCM 状态工作时,应满足

式中,fs为所设定开关频率。
所以,如果设计变换器输出最大功率为10 W,额定输出电流为1.5 A,可以根据式(1)~式(7)选定器件参数,初级MOSFET 选用250 V/5 A 型号,电压裕量为30%。变压器选用EI20 结构铁氧体磁芯,可以满足设计要求。
2.3 均衡时间估算及性能评估
开关矩阵均衡器在电池组待机或放电状态下作用,通过吸收电池组电量,补充SOC 最低电池单体电量。首先假设均衡控制器的运算时间、A/D 采样延时和电压采样误差均忽略不计。显而易见,锂电池的均衡时间和均衡电流成正比,均衡电流越大均衡时间越短。另外,均衡时间还和电池之间的不平衡度相关,电池之间的压差(或SOC 差)越大所需要的均衡时间越长。以SOC 最大差(ΔSOC)和均衡电流Ieq为参照量分析锂电池均衡时间Δteq。
因为锂离子电池SOC 和开路电压线性相关,ΔSOC 可以由电池间最大压差ΔV 近似代替,则

式中:C 为电池单体的剩余容量;Qtotal为锂电池单体的最大荷电量。由电池的充电特性得

由开关矩阵均衡器特性得

式中:Iout为均衡式流出锂电池组电流;Iin为流出锂电池单体电流;η 为均衡变换器的效率,Vcell和Vpack分别为电池单体和电池组的电压。
以16 个电池单体串联组成的电池组为例,式(10)可以写成

联立式(9)~式(11)并做简单化简,可得

分析上述结果,可以得出以下结论:
(1)均衡控制系统可以通过式(12)预测均衡时间,实时调整优化均衡算法,改善均衡速度;
(2)通过提高均衡转换器的功率,可以减少均衡时间;
(3)开关电源的效率对均衡时间影响随着电池单体数量增多而变小。
2.4 与现有典型均衡拓扑比较
表1 给出了3 种比较有代表性的均衡拓扑与本文所提出主/被动拓扑比较的结果,其中S 代表实际MOSFET 的使用数量,NC代表电容的数量,ND代表二极管数量,M 代表磁性器件数量,NR代表电阻的数量。均衡模式中C2C(cell to cell)表示电池单体对电池单体均衡,C2R(cell to resistor)表示电池单体对电子耗能均衡,P2C(pack to cell)表示电池组对电池单体均衡。均衡器的性能包括精度、效率和速度,可靠性由电路结构和控制复杂度等决定。需要指出的是,此比较结果只反映低轨卫星电源系统的特殊应用场景。
从表1 可以看出,器件数量上,对称多绕组变压器均衡拓扑和非对称多绕组变压器均衡拓扑最具优势,开关矩阵主被动混合需要的器件数量最多,但由于开关矩阵是慢速开关,而且损耗不大,开关可以选用多个MOSFET 封装在一起的贴片器件,且不需要考虑散热器;开关电容均衡拓扑由于电容的体积比较大,虽然器件数量上属于中等,实际电路体积最大,而在卫星电源应用中,成本主要由器件体积和重量决定,其中重量成本最大,所以开关电容均衡拓扑的隐性重量成本最高。

表1 均衡拓扑比较Tab.1 Comparison among equalization topologies
在均衡模式上开关电容是相邻C2C 模式;对称多绕组是任意C2C 模式;非对称多绕组是P2C模式;开关矩阵主被动混合在充电均衡时是C2R模式,在放电时是P2C 模式。充放电状态对均衡速度并没有绝对影响,除了开关电容由于“击鼓传花”式均衡方式限制住均衡速度外,其他3 种拓扑都有比较良好的表现。由前文分析,低轨卫星蓄电池系统在充电时需要快速均衡,放电时对均衡速度没有要求,依此特点,开关矩阵主被动混合均衡拓扑契合度最佳。
在效率方面,开关矩阵主被动混合均衡拓扑加入了被动均衡,是效率拉低到“中”,根据前面分析充电均衡时系统不需要考虑效率问题,其他3 种典型拓扑效率方面没有太大差异。
由于前3 种拓扑都是借助电量从高到低流动自动均衡,会因为器件参数的差异而影响精度表现。开关矩阵主被动混合均衡拓扑有精确采样均衡通路控制,在均衡精度上最优。
可靠性方面,只有开关电容均衡同时高频开关太多会有EMI 干扰,其他3 种拓扑在可靠性上都比较理想。虽然本文所提出的开关矩阵主被动混合均衡拓扑开关器件较多,但是均为慢速开关,EMI干扰问题很小,而且低速度可使开关管开关电压尖峰很小,散热也容易设计,只要选取合适的电压电流裕量,这种拓扑开关器件失效率可以控制在极低的水平。
综合来说,在低轨卫星电源系统中应用时,前3种拓扑虽然结构简单、控制容易,响应速度快,但在重量成本、充电均衡速度或可靠性上还是或多或少存在问题。本文所提出的基于开关矩阵的主/被动混合均衡拓扑安全可靠、控制精度高、均衡电流可调节,最适合应用于低轨卫星直流母线电源系统上。
2.5 主要开关器件故障对系统可靠性影响
当反激变换器的MOSFET 短路故障时,设置在变换器输入端的快速保险丝会熔断,使变换器失能,此时主被动混合均衡拓扑变为单纯被动均衡拓扑,仍具有充电均衡功能,与现有大多数低轨卫星只采用的被动均衡功能一致,不影响电源系统的可靠性。MOSFET 断路故障与此类似。
每个开关矩阵单元的两个端口均设置快速熔断保险丝,当某个矩阵单元中MOSFET 短路时,保险丝会熔断,使这个单元被旁路。因为每个矩阵单元是相互独立的,其他电池单体仍具备均衡能力。这种状态只对一个电池单体的均衡性能有所影响,但仍比现有大多数低轨卫星电源只采用被动均衡性能要好得多。同样,开关矩阵单元中MOSFET 断路引起的状态类似,此处不再赘述。
综上,反激变换器和开关矩阵中的MOSFET 出现故障时对整个电源系统的可靠性影响不大。
3 实验结果与讨论
3.1 实验平台介绍
锂离子电池管理器实验平台如图7 所示,由充放电器、电池组、BMS 控制板和监控平台4 部分组成。充放电器主要实现锂离子电池组的充放电功能,充电器由可编程直流电源模拟星上工况,放电器则由可编程电子负载模拟。测试电池组由16 个额定容量为2.8 A·h 锂离子电池单体串联组成。电池组的充放电参数为:充电截止电压4.2 V,放电截止电压3.6 V。
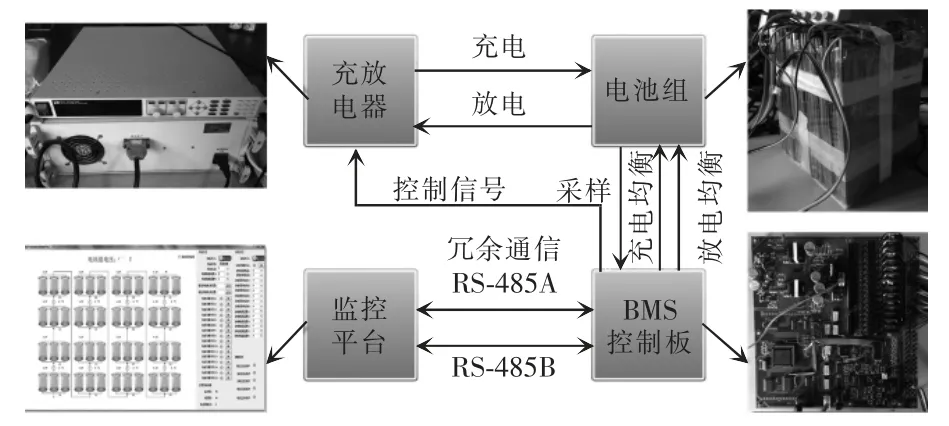
图7 实验平台Fig.7 Experimental platform
均衡部分主要器件选型和参数如表2 所示。系统主要电气参数如下:均衡电路输入电压范围为55~64 V;均衡电流为1.5 A;变换器开关管为250 V/5 A MOSFET;开关矩阵P-MOS 为-150 V/-10 A;开关矩阵N-MOS 为150 V/10 A。需要注意的是,实际开关矩阵电压应力并不需要150 V,实验中选用此型号是受市场条件限制做的平衡。

表2 均衡电路参数Tab.2 Parameters of equalization circuit
3.2 性能验证
3.2.1 变换器性能
图8 所示为均衡变换器工作时的波形,变换器工作在电流断续模式下。其中图8(a)为开关管的驱动波形,设计开关占空比为30%;图8(b)为开关管漏极和源极之间的电压vds,最大为180 V,设计留有75%裕量;图8(c)为整流二极管的输出波形;图8(d)为初级开关管电流波形,电流峰值Ip为1.2 A;图8(e)和图8(f)是输出电压波形,输出电压由电池钳位,电压纹波为10 mV,不会对电池寿命造成影响。测量得到变换器功率为86%,开关矩阵导通时每组损耗为0.77 W。实验证明所选用器件满足变换器应力要求,变换器性能满足设计需求。


图8 均衡变换器主要工作波形Fig.8 Key waveforms of equalization converter
3.2.2 均衡器性能
1)无均衡系统测试
在充电均衡和放电均衡不使能的情况下分别测试的电池组充电曲线和放电曲线如图9 和图10所示。
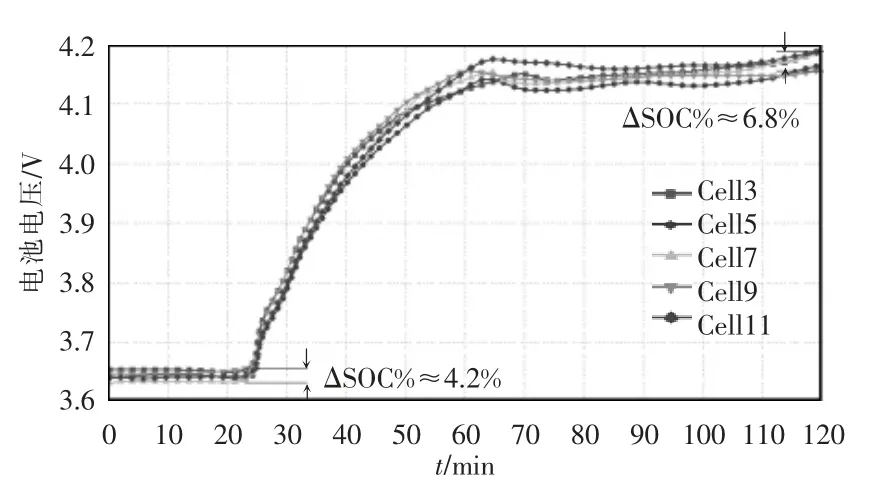
图9 无均衡充电Fig.9 Charging without equalization
为了保证图片清晰可读,在绘图时减少了电池数量。锂电池充电电流2 A,放电电流1.5 A,采样周期为每2 min 一次。测试前使各电池单体初始电压维持在比较接近的电压值,充电初始电压为3.65 V左右,放电初始电压4.15 V 左右,充电和放电动作都是在电路稳定运行25 min 后开始。由图10 和图11 可知,所测试电池组充电和放电都呈现不一致性。充电初始不均衡度为4.2%,到充电结束发散到6.8%。放电时电压的不均衡度更严重一些,从初始的4.0%变为最终的13.6%。电池电压的不均衡会导致电池组充放电不完全,造成容量浪费。

图10 无均衡放电Fig.10 Discharging without equalization
2)充电均衡
在启用充电均衡电路的情况下对电池组充电,测得数据如图11 所示。与图9 相比较,在充电均衡电路动作的情况下,电池电压在恒压充电阶段收敛性得到良好改善,SOC 差异从最初的4.0%缩小到1.9%。
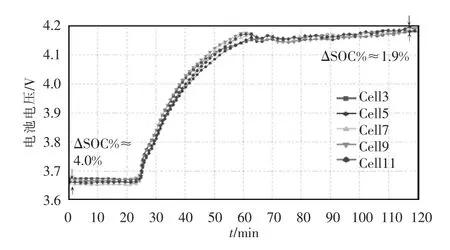
图11 充电均衡Fig.11 Charging with equalization
3)放电均衡
电池组处于待机状态。电池组电压为53.23 V,锂离子电池单体平均电压为3.802 V,人为将编号为Cell7 点电池单体放电到3.696 V,其他电池单体之间电压接近。定时对各单体电压进行采样,测量频率为每2 min 一次。在第40 min 时启动放电均衡电路,对Cell7 进行均衡,直到程序判断Cell7 满足均衡条件为止。均衡电压和时间关系如图12 所示。

图12 电池单体均衡测试Fig.12 Equalization test of one battery cell
由图12 可知,初始时间点Cell7 与平均电压相差110 mV,估算SOC 差值为17%。电压差超过程序设定阈值,均衡电路启动。在大约60 min 后最大压差小于设定值,均衡电路关闭。最终压差为25 mV 左右,估算SOC 差值为6%。经过反复测试,调节误差和均衡时间在可接受范围内。
电池组去除均衡电路,反复充放电3 个回合,使电池单体之间不平衡度随机分配。然后连接锂离子电池管理系统,在40 min 时开始对电池单体间进行电压调整。每2 min 抓取一次5 个典型电池单体的电压数据,其中编号Cell5 和Cell3 为电池组中最高电压的2 个电池单体,Cell7 为中间电压电池单体,Cell4 和Cell9 为最低电压单体。记录200 min 数据,绘制V-t 曲线如图13 所示。

图13 多电池均衡测试Fig.13 Equalization test of multiple battery cells
由图13 可见,5 个采样电池单体初始状态时最大压差为130 mV,换算为SOC 差异为22.2%。当锂离子电池管理器开始工作时首先向电压最低的Cell9 进行能量转移。由于星上CPU 的运算能力限制,当需要进行多任务处理时均衡器是不能动作的,所以程序中设置均衡器每个工作阶段为30 s,然后以2 min 为一个周期重新扫描,再确定是否需要均衡。在第90 min 时,Cell4 和Cell9 电压相等,均衡电流交替流入。直到第110 min 时Cell4 变成最小电压电池单体,均衡器开始只对Cell4 动作。进一步观察可得,电压越接近平均电压的单体,变化率越小,而电压初值最高的Cell5 下降斜率最大,整个过程中能量不断向外转移。随着时间推进,电池组的电压差成收敛趋势,到测量结束时最大压差为70 mV,SOC 差异缩小为6.2%。需要指出的是,如果测量不停止,电池压差会继续变小。另外Cell3 和Cell7 曲线中有几个测量突起,是因为测量过程中下位机通信中断,使采样时间点延后,由锂电池的松弛电压引起,而且突起电压小于5 mV,在允许误差电压范围之内。
测试表明放电均衡电路的加入能很好地改善电池组的一致性。对电池单体中能量重新分配不会增加系统耗能。通过对低电压单体补偿,能够增加整个电池组的工作时间,减少充电次数,从而延长电池组寿命,进而提高整个系统的可靠性。
人为制造电池极端不均衡状态,电池组中Cell9 电压最高,电压为4.15 V,接近于满电状态;电池Cell12 电压最低,电压为3.66 V,接近于所允许电压最低值。电池最大压差为0.49 V。电路初始状态为待机均衡。在第25 min 时接入负载对电池放电,放电电流为1 A。
选取电池组中4 个典型电池单体电压采样数据,绘制V-t 曲线如图14 所示。
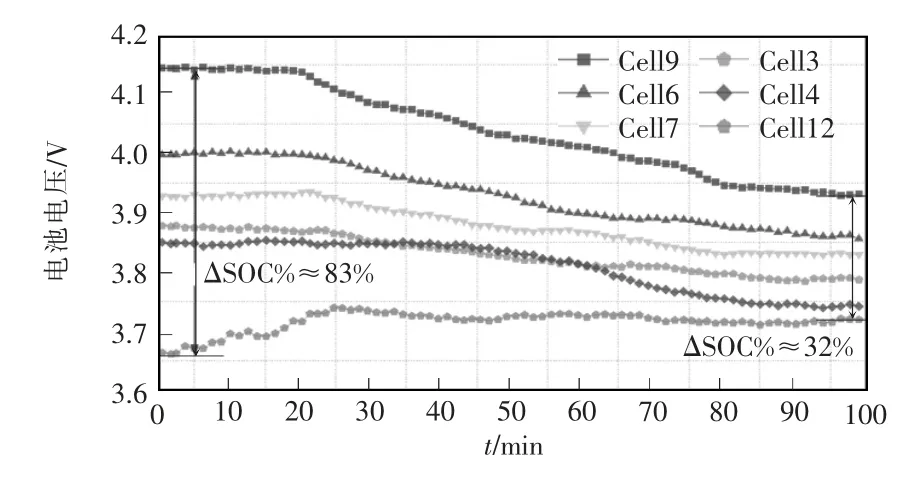
图14 放电状态下电池均衡Fig.14 Battery equalization performance in discharging state
整个测试过程中,由于Cell12 电压最低,主动均衡电路始终对其进行补电,相当于放电回路中Cell12 被旁路掉。由实验结果可见Cell12 电压在其他电池放电时电压基本维持稳定,不会出现过放情况。如果没有主动均衡电路,则Cell12 电压会迅速降低,放电到所允许最小单体电压3.6 V 时,关闭整个蓄电池组,会导致其他电池中存储能量的浪费。实验验证了放电均衡的有效性和必要性。
由于卫星电源系统太阳能发电功率设计要远大于负载需求功率,多余能量会转化为热能排放到太空中,充电时均衡器效率并不是关注重点,所以只测试放电均衡变换器效率曲线如图15 所示。在性能最差的电池单体电压与平均电压差比较大时,变换器采用1.5 A 电流恒流控制,此时设置负载在变换器60%负载处,忽略电池内能量损耗,均衡效率为89%。当性能最差电池单体电压与平均电压差值不大时,均衡变换器采用恒压控制,此时效率略低,为73%~89%之间,但此时均衡功率很小,损耗在可控范围之内。
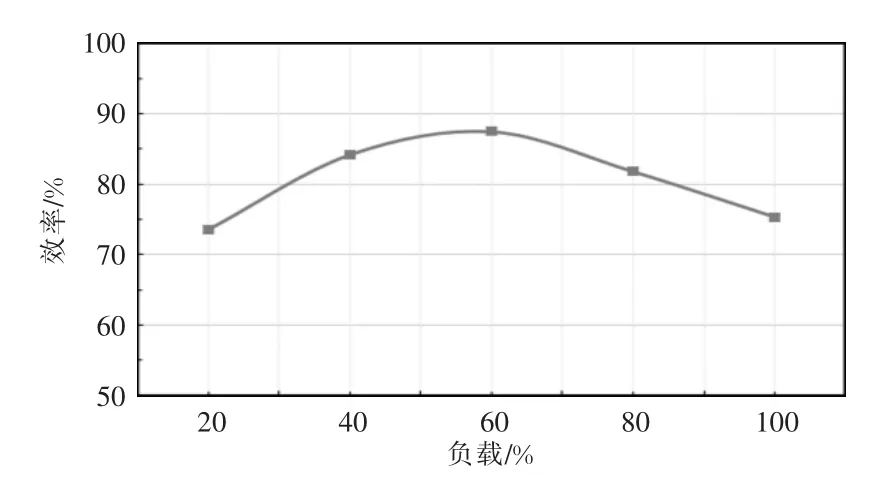
图15 均衡变换器效率曲线Fig.15 Efficiency curve of equalization converter
4 结语
传统低轨卫星电源储能系统大多只具备被动均衡功能,均能性能不佳,影响电源系统可靠性。低轨卫星电源具有轨道周期短和循环周次多的工作特性,且在设计时太阳能面板功率远大于负载所需功率,结合锂电池被动均衡可靠性高和主动均衡性能好的优点,本文提出基于开关矩阵的主被动均衡拓扑。该拓扑能在光照期储能系统需要迅速充电时,采用简单可靠的被动均衡,迅速存储能量;在地影期锂电池处于待机或放电状态时,采用主动均衡,延长电池寿命。该拓扑结构简单,控制容易,且可靠性高。本文详述了该拓扑工作原理和设计方法,并搭建实验平台测试性能,实验结果证明了其有效性和实用性。
猜你喜欢
储能科学与技术(2022年2期)2022-02-19
煤(2022年2期)2022-02-17
天津外国语大学学报(2021年1期)2021-03-29
矿产勘查(2020年3期)2020-12-19
VOGUE服饰与美容(2020年5期)2020-09-03
汽车维修与保养(2020年11期)2020-06-09
汽车文摘(2017年5期)2017-12-05
三联生活周刊(2017年48期)2017-11-25
汽车电器(2014年5期)2014-02-28