
纯电动汽车制动能量回收策略优化研究
2022-10-10 07:39王永鼎裴开雅
机械科学与技术 2022年9期
王永鼎,裴开雅
(上海海洋大学 工程学院,上海 201306)
纯电动汽车跟燃油汽车最主要的区别在于在制动过程中,纯电动汽车可以将电动机转换为发电机对部分动能进行回收。发电机将部分动能转化为电能,既可以消耗动能起到制动作用,又可以回收部分能量,对提高电动车辆电能的利用率有重要意义。
近年来,国内外专家学者都在研究纯电动汽车制动能量的回收并取得显著成果。郭金刚等[1]等通过遗传算法解决了电机制动等多种影响因素在制动力分配过程中的约束问题。谢文科[2]将制动力沿ECE法规线和f线分配,分配曲线分别向上和向左平移,保证了制动可靠性,但忽略了车速对制动的限制。王茹洁等[3]依据I曲线通过对电机再生力矩优化,在牺牲制动舒适性后使有效发电功率达到最值,回收更多制动能量。陈赞等[4]基于I曲线,将机械制动力和再生制动力按模糊控制算法合理分配,将电机再生制动特性发挥至最佳,可是忽略了电池充电功率限制,易损害电池。
针对以上问题,本文以某款前驱纯电动汽车为研究对象,设计了以车辆行驶速度、电池荷电状态以及制动强度为输入,再生制动力占总制动比例系数为输出的模糊控制器,同时针对电机和电池的限制修正电机转矩后对前后轴制动力进行分配,最后与建立的整车模型联合仿真,分析该策略的经济性。
1 基于模糊控制的再生制动控制策略
选取车型的相关参数见表1。
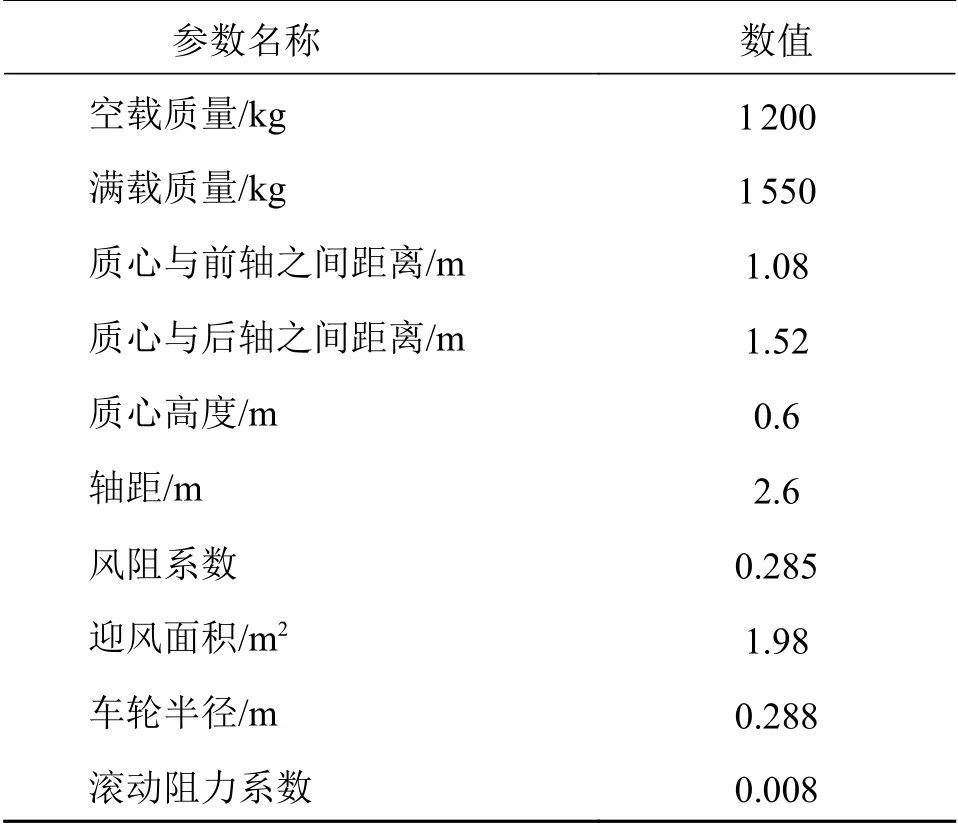
表1 整车技术参数
1.1 能量回收策略
本文设计以车辆行驶速度v、制动强度z、电池SOC值为输入变量,再生制动在总制动中的占比系数a为输出量的一种模糊控制器,首先对再生制动力借助模糊控制算法进行初次分配,然后考虑到电池和电机的最大充放电限制,进行二次制动力分配,使得各制动力分配更贴合实况。又因在该控制策略中制动力分配安全区间以及电池安全性得到了充分的考虑,所以不仅保证了车辆制动稳定性,且提高了能量回收率。能量回收策略如图1所示。
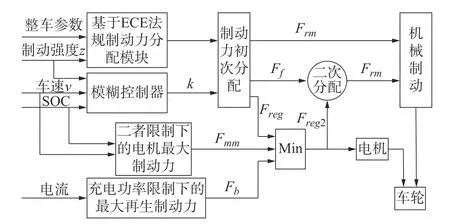
图1 能量回收策略原理图
图1 中:Freg为 再生制动力;Freg2为二次修正后的再生制动力;Ffm为 前轴机械制动力;Frm为后轴机械制动力;Fmm:电机最大制动力;Fb为电池充电功率限制下的最大制动力
1.2 前后轴制动力分配
在确保汽车制动安全性同时又要最大限度回收能量,因此汽车的前后轴制动力分配应在由ECE法规曲线(欧洲经济委员会安全法规线)、I曲线(理想制动力分配曲线)、f线组(前轮抱死后轮未抱死状态下制动力分配曲线)及横坐标轴所围成的区域[5-7],如图2所示。
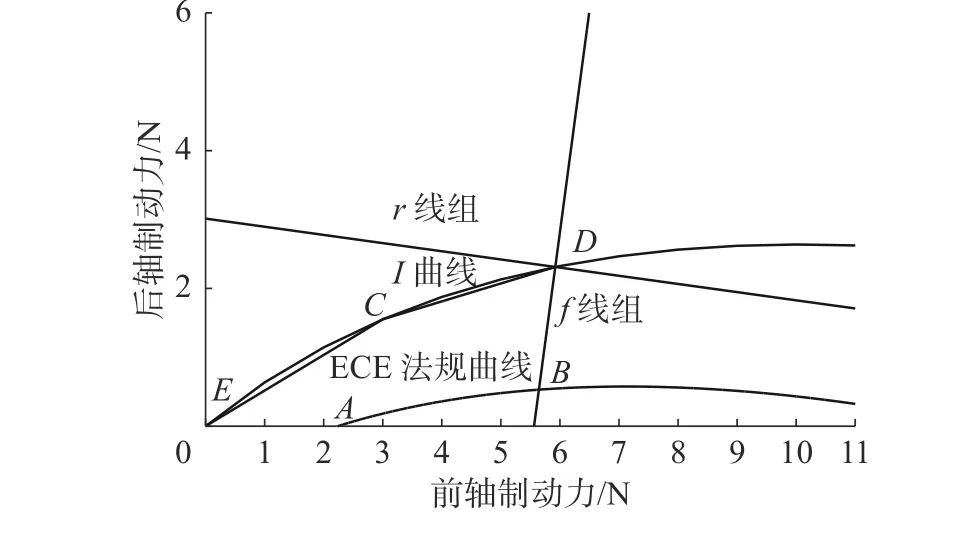
图2 制动力分配图
因为I曲线是非线性的[8],计算繁琐,所以通过引入变比例阀分配线取代理想制动力分配曲线以简化计算量。在I曲线上选取恰当的转折点C点,使变比例阀分配线无限接近I曲线,即在满足制动力分配要求下,OC、CD和I曲线围成的面积S最小。

式中:XC,YC,XD,YD分别为C点和D点的横纵坐标;x为前轴制动力函数变量。
制动力分配由ABCDE所包围区域确定,A、B、D点将其制动强度划分为4个部分:
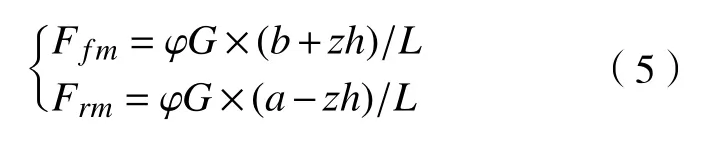
1)轻度制动(0<z<0.22),此时制动需求较低,仅靠前轮按照EA段进行制动力分配以获取更多能量。当处于此制动强度工况下,前后轮制动力为

2)中等强度制动(0.22<z<0.53),为了提高前轮制动比例,AB段制动力按照ECE法规曲线分配。此时制动力分配为

3)中高强度制动(0.53<z<0.7),此时汽车处于紧急制动,为了保证制动稳定性并提高能量回收效率,制动力按照BD线段分配,前后轴制动力为

4)高强度制动(z>0.7),当处于高强度制动状态时,为了确保安全制动距离,只有机械制动完全参与工作,电机制动不参与。此时按照I曲线进行制动力分配,前后轴制动力分配为:
1.3 再生制动制约条件分析
蓄电池作为再生制动系统中的储能元件,电机作为能量转换部件,二者是制约再生制动以及能量回收的最主要因素[9]。为了避免发电功率超出限制损害电池,需要限制电机的输出转矩。
电机的发电功率

式中:w为电机角速度;ηg为 电机发电效率;ηt为机械传动效率。
电池的充电功率

式中:Eb为电池电压;Rb为 电池内阻;Ic为充电电流。
由式(6)和式(7)可得出修正后的电机转矩式

式中ηc为充电效率。
同时再生制动过程中充电电流和功率若超过蓄电池的最大限制,也会对电池造成不利影响。根据文献[10-12]限制再生制动最大值,即

式中v为车速。
1.4 再生制动比例系数a的确定
再生制动比例系数a由速度v、制动强度z、电池SOC这3个参数共同识别,其隶属函数图见图3。其中,v代表车辆当下行驶状态,定义其模糊子集{L(低),M(中),H(高)},论域取[0, 100];z代表车辆制动时紧急程度反应制动意图,其模糊子集定义为{VL(低),M(中等),VH(很高)},论域为[0,1];电池SOC反映了电池剩余电量可用状态,定义其模糊子集为{S(低),M(中),L(高)},论域为[0,1]。a的模糊子集定义为{VL(很低),L(低),M(中等),H(高),VH(很高)},取值范围为[0, 1]。a越接近0,制动更加稳定;a越接近1,能量回收率更高。由仿真实验和理论数据[13]制定a模糊控制规则见表2。

图3 各变量隶属度函数图

表2 模糊控制规则表
2 仿真结果与分析
结合提出的制动力分配策略,本次选择在路面附着系数为0.85的路面对轻度、中度、高强度这3种不同制动工况进行联合仿真分析。通过制动过程中前后轴摩擦力矩和电机输出转矩记录,得到制动工况下制动力特性[14-16]。
2.1 前后轴制动力分析
2.1.1 轻度制动
设定初始速度为41 km/h,制动强度为1.2 s-2,制动时间为12 s,初始SOC为75%。
由图4可知,轻度制动工况下强度小于0.22,此时制动力完全由前轴提供,包括机械制动以及再生制动,后轴不参与制动过程,符合EA段的制动力分配规则。
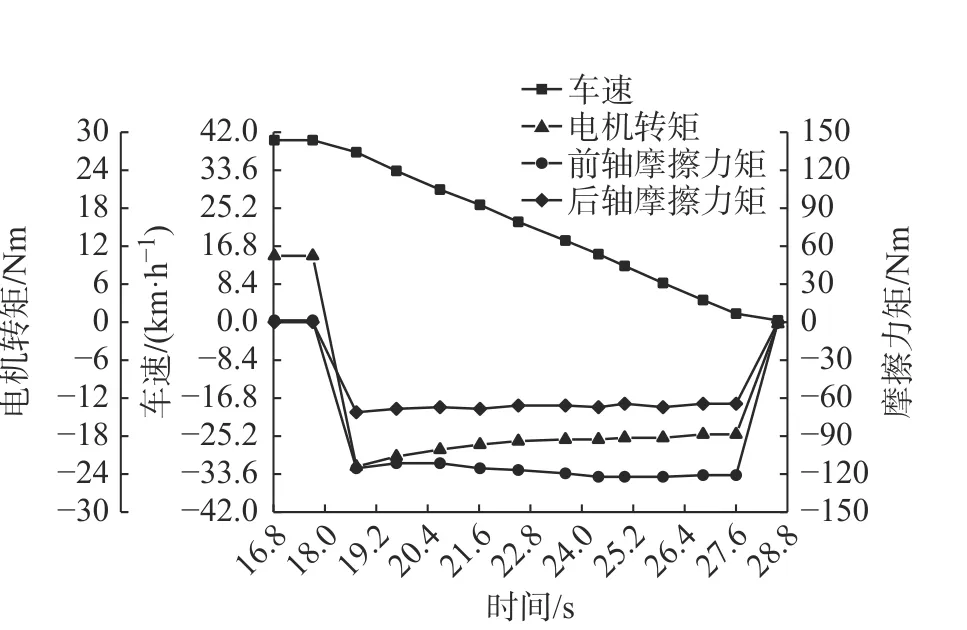
图4 轻度制动工况制动力特性
2.1.2 中等强度制动
设定初始速度61 km/h,制动强度为4.0 m/s2,制动时间为5 s,初始SOC为74.58%。
由图5可知,制动强度很大部分都处于0.22 ~0.53,前轴制动参与比例较大。前后轴制动力分配和AB段拟合如图6所示,证明了在该工况下制动力分配符合本文制定的策略,且根据模糊控制规则再生制动参与制动比例更大。
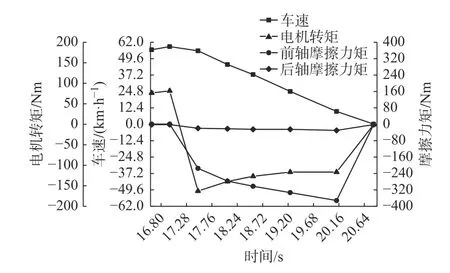
图5 中等强度制动工况制动力特性

图6 中度制动前后轴制动力分配
2.1.3 中高强度制动
设定初始速度为90 km/h,制动强度为6.5 s-2,制动时间为5 s,初始SOC为74.86%。
由图7可知,当制动强度处在0.53 ~ 0.7时,属于高速行驶下的制动。此时主要依靠机械制动,再生制动参与比例减小,确保了制动稳定。且电机转矩因为受到电池充电功率限制,增幅趋于平缓。前后轴制动力分配与BD段拟合见图8,可知制动力符合分配规则。
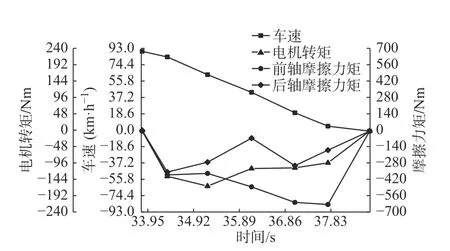
图7 中高强度工况制动力特性

图8 中高强度制动前后轴制动力分配
当制动强度大于0.7时,为了防止汽车车胎抱死,保证制动安全,此时电机完全退出工作,没有能量回收。
不同制动强度下能量回收如表3所示。

表3 能量回收情况
2.2 NEDC路况仿真分析
本文在NEDC(新欧洲驾驶循环工况)路况[17]下通过对比软件自带控制策略下SOC的变化值对本文提出的制动能量回收效果进行评估。设电池初始SOC值设为0.95,仿真步长为1s。图9是NEDC工况下两种控制策略的电池SOC变化图。由图9和表4可知,仿真停止时,Cruise自带控制策略和本文设计的控制策略SOC值分别为52.40%和54.64%,SOC值分别下降了42.6%和40.36%,SOC消耗比系统自带策略减少了2.24%且车辆制动能量回收率提高了4.38%,总能量回收率提高了1.97%。

图9 电池SOC对比图

表4 NEDC工况下能量分析
3 结论
本文以某款前轴驱动纯电动汽车为研究对象,提出一种改进型再生控制策略,并运用相关仿真软件对其进行分析,所完成的主要研究如下:
1)在满足汽车制动安全要求,考虑了电机和电池最大充电功率约束下,提出基于ECE法规线、I曲线和f曲线的前后轴制动力分配策略,利用MATLAB/Simulink和Cruise建立联合仿真模型,验证了本策略正确性。
2)设计模糊控制器通过模糊控制的方法,根据不同强度确定机械制动力和再生制动比例,制定能量回收控制策略。满足不同工况下对再生制动力的需求,更合理安排电机再生制动占比,提高能量回收利用率。
3)在轻度、中度、中高强度这3种制动工况和NEDC工况下对本文策略进行仿真实验,数据结果表明车辆制动能量回收率提高了4.38%,总能量回收率提高了1.97%。
猜你喜欢
汽车工程学报(2022年5期)2022-10-12
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
内燃机与配件(2022年2期)2022-01-17
科学与财富(2021年33期)2021-05-10
舰船科学技术(2021年12期)2021-03-29
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
电机与控制学报(2018年9期)2018-05-14
