捷联惯组空间八点减振IMU组合设计
2022-10-09 01:27:16杨研蒙闫红松
导航定位与授时 2022年5期
李 茜,吕 琛,李 欣,杨研蒙,闫红松
(1.北京自动化控制设备研究所,北京 100074;2.中国人民解放军96963部队, 北京 100000)
0 引言
捷联惯组作为惯性坐标基准和惯性测量装置,其工作精度与可靠性直接影响飞行器的飞行精度。在一般情况下,捷联惯组减振系统可以沿着3个坐标轴的方向平移振动,也可以绕3个坐标轴作旋转振动,系统的每一种平动或者转动都有它的固有频率,因此一共有6个自由度。从导航性能分析,力学环境特别是振动会使惯组输出含有高频成分,而相对于载体的刚体运动,高频成分是虚假的运动,有可能引起圆锥运动等效应,致使惯导及其相关应用系统性能下降。因此,需要抑制振动(包括线振动和角振动)、冲击等各种因素引起的误差。
陀螺仪和加速度计安装于台体上构成的惯性测量单元(Inertial Measurement Unit,IMU)组合,是捷联惯组中最为重要的核心部件。利用减振器将IMU组合弹性连接到系统结构上,可以减小剧烈的随机振动对陀螺仪和加速度计的不良影响,有效提升捷联惯组的环境适应性。但当减振组件的弹性中心与质心不重合时,其在作线振动的同时还会伴随有角振动,作角振动的同时也夹杂着线振动,即减振组件不同自由度上的振动之间会发生耦合,而线角振动频率差距大,质量分布尽量集中于中心可在一定程度上抑制线角耦合。线角耦合给减振组件引入伪角运动信号,不仅由于尺寸效应影响线加速度的测量精度,而且还影响角速度测量的传递特性,从而影响减振组件的测量精度和动态性能。采用内减振的IMU组合体积小、质量小,相对于外部减振的捷联惯组而言更易引发线角耦合问题,这成为制约工程应用的重要因素。
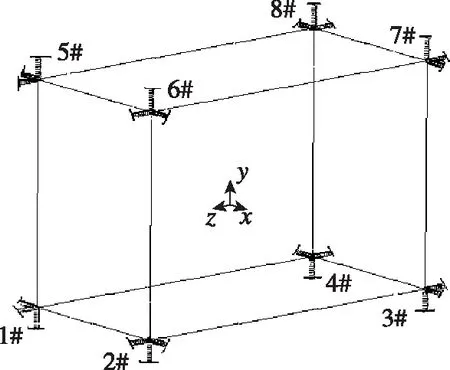
(a) 空间八点减振
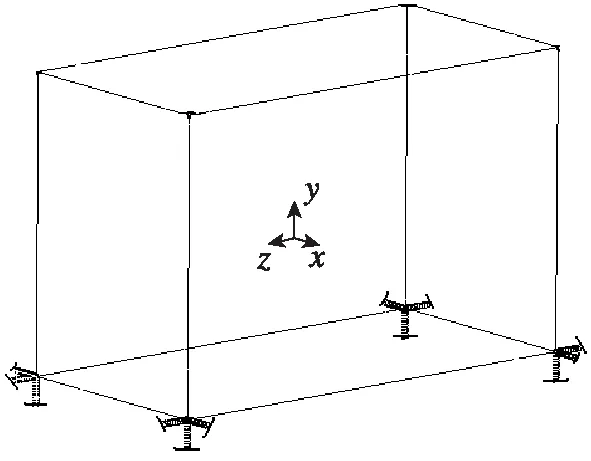
(b) 底部四点减振
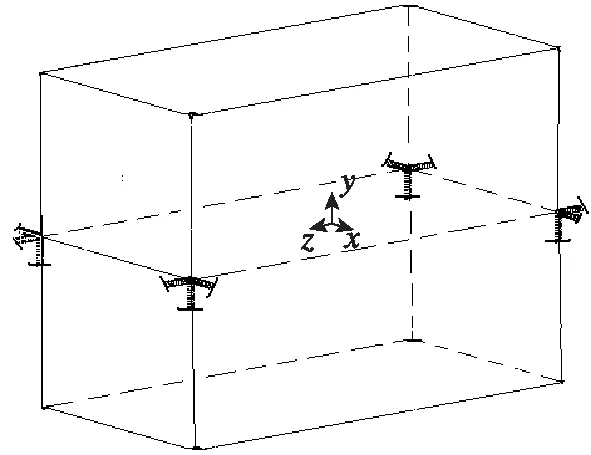
(c) 平面四点减振
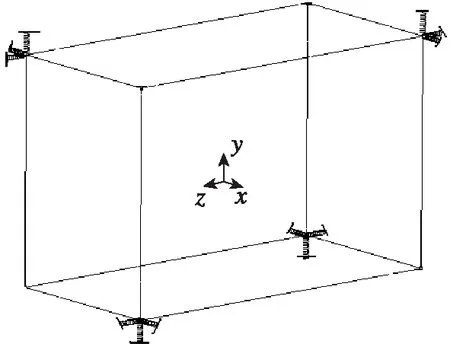
(d) 吊脚四点减振图1 常见的减振布局形式Fig.1 Common vibration reduction layouts
常见的减振布局形式有四种,分别为底部四点减振、平面四点减振、吊脚四点减振及空间八点减振等,如图1所示。工程上为了满足线振动频率尽可能小、角振动频率尽可能大的要求,除直接调整减振器外,通常采用改变减振器布局实现,使得支承所得的回转半径增大,例如用空间四点或八点支撑取代平面四点支撑。空间八点减振由于增大了2个旋转自由度上的减振器跨距,并同时增大了这2个旋转自由度上的角共振频率,所以理论上线角耦合能够得到一定程度的抑制。
本文将结合IMU组合研制过程的相关经验,从空间八点减振IMU设计过程、力学性能仿真及线角耦合抑制等多角度进行详细的阐述,对今后空间八点减振的IMU组合设计提供支撑。
1 IMU组合的设计与分析
1.1 IMU组合的台体设计
IMU组合由3个光纤陀螺表头、1个光线陀螺电路盒、3个挠性加速度计、连接器及结构件组成。台体需保证具备足够的力学环境适应性、温度环境适应性及安装精度,具体来说分别是:
1)零部件安装工艺性,各零部件安装完成后,方便拆装返修维护,相互之间不得遮挡;
2)三轴光纤陀螺表头相互正交、三轴挠性加速度计相互正交,控制安装面垂直度;
3)台体具备较高的刚强度,一阶模态高于或接近一般飞行器随机振动频谱最高频率;
4)台体应有合理的热传导路径,尽可能减少电路板以控制热源数量,并将热源尽可能远离光纤陀螺表头与挠性加速度计;
5)IMU组合应将质心布置于弹性中心;
6)台体应尽量满足轻质化设计需求;
7)保障台体具有良好的机加、铸造工艺性,具备大批量生产的条件。
经过多轮修正后,IMU组合及台体结构如图2所示。模型上IMU组合的质心与弹性中心的偏差低于1mm。
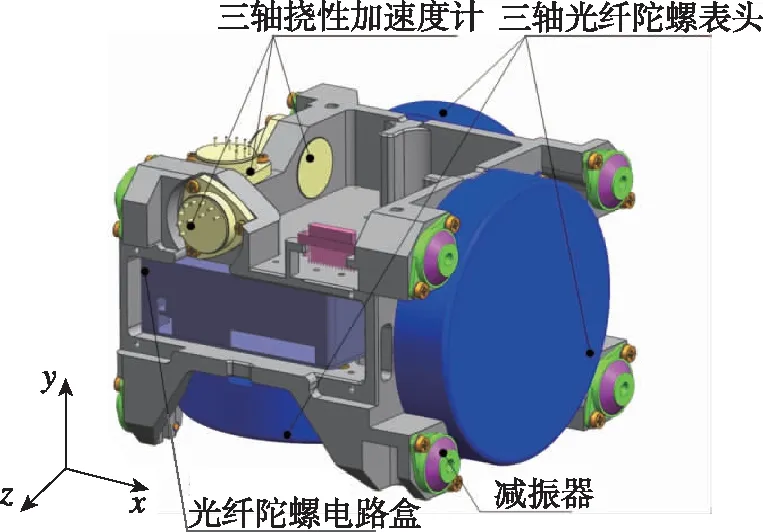
(a) IMU组合示意图
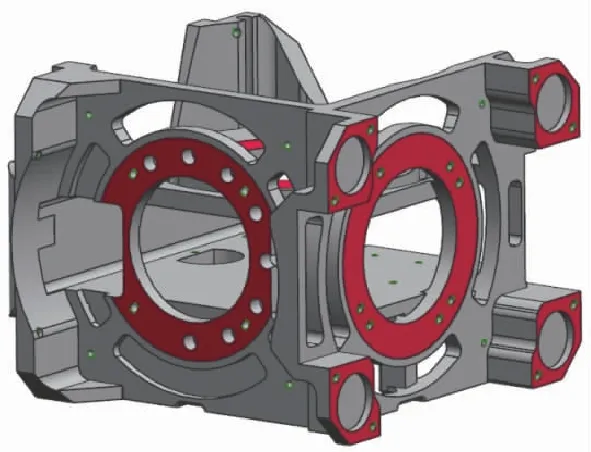
(b) 台体模型图2 IMU组合及台体Fig.2 IMU and platform
1.2 减振设计
IMU组合减振器的主要功能是提升其抗过载、抗振动能力,避免达到破坏应力的状态。一般来说, 除了要求减振器具有必要的物理机械性能外, 还需对减振器的谐振频率、静态刚度、动态刚度、阻尼系数等提出要求。
减振器传递率公式为
(1)

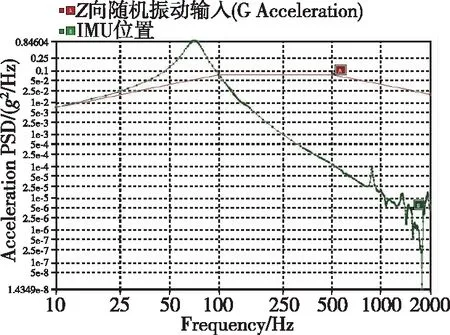
图3所示为IMU组合随机振动输入条件,如减振器谐振频率过低则带宽过低,谐振频率过高则无法对高频充分衰减,一般处于40~100Hz之间,本文选择中值70Hz。减振器的阻尼比越大则动态放大倍数越小,目前一般将共振放大倍数控制在2~5倍,本文选择阻尼比0.125即放大4倍。此外,振动条件要求减振器在3个方向等刚度、等阻尼,故后续分析三向的参数均一致。
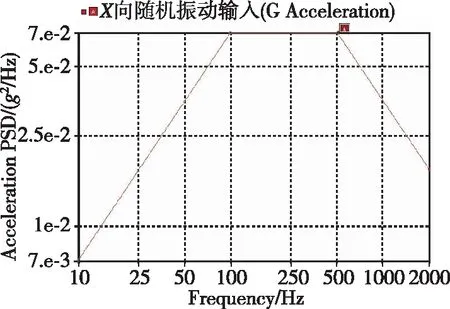
图3 随机振动输入条件Fig.3 Random vibration input condition
1.3 IMU组合模态计算
模态是对结构固有特性的一种表述,通过模态分析可以客观地描述结构可靠性与力学环境适应性。本次研制的IMU组合将在船载、车载、机载等诸多负载环境下工作,其整体模态应尽可能高。对台体结构进行合理简化处理后,建立IMU组合的有限元模型如图4所示,模型共包含176433个高阶单元和310032个节点。文中描述坐标系与图4坐标系一致。文中涉及的所有计算均在有限元软件ANSYS Workbench环境下完成。
台体结构采用材料为硬铝2A12, 其密度约为2800kg/m, 弹性模量为72Gpa, 泊松比为0.3。通过模态分析得到IMU组合的前7阶模态如表1所示。

表1 IMU组合前7阶模态
表1中,第1阶固有模态为沿方向线运动频率、第2阶固有模态为沿方向线运动频率、第3阶固有模态为沿方向线运动频率、第4阶固有模态为沿轴角运动频率、第5阶固有模态为沿轴角运动频率、第6阶固有模态为沿轴角运动频率。可见,IMU组合满足工程应用上线运动频率尽可能小、角运动频率尽可能大的要求,线角耦合的现象在一定程度上可以被结构布局形式抑制。第7阶模态为875.7Hz,IMU组合具备足够的刚度。
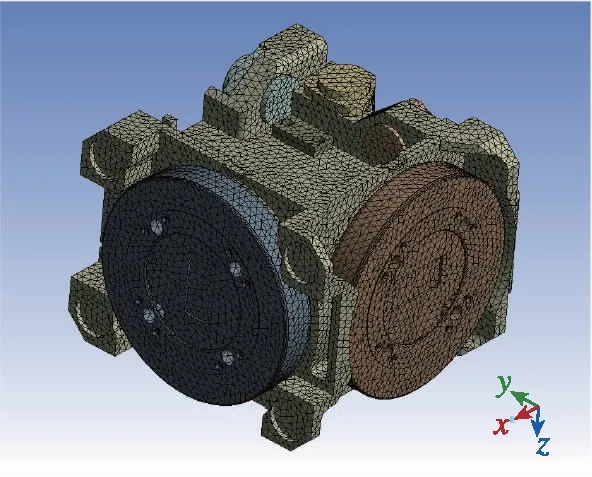
图4 IMU组合的有限元模型Fig.4 Finite element model of the IMU
1.4 IMU组合随机振动仿真
按图3随机振动输入条件仿真,可以得到光纤陀螺表头安装位置的测点加速度响应功率谱密度曲线,如图5所示。可以看到,陀螺表头安装位置除了在减振器的谐振频率处有明显放大外,高频部分都得到了有效衰减,曲线上无线角耦合的二次谐振峰,说明空间八点减振的IMU组合在抑制线角耦合上具有一定作用。
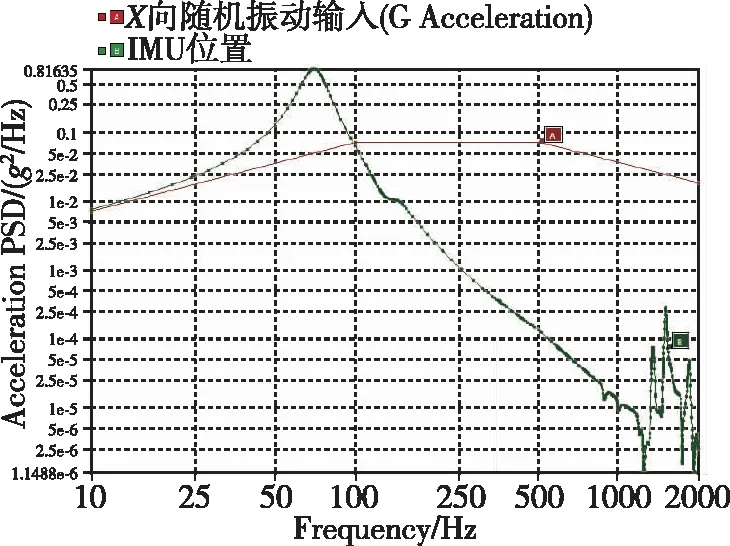
(a) X向随机振动陀螺表头安装位置响应曲线
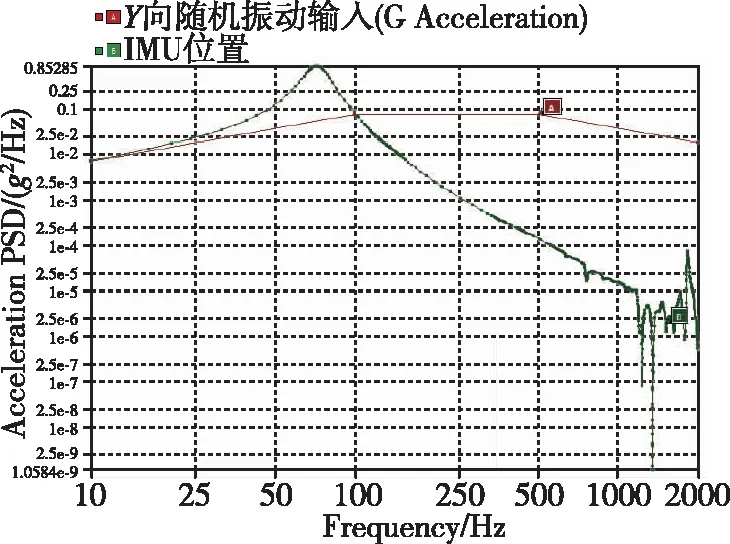
(b) Y向随机振动陀螺表头安装位置响应曲线
(c) Z向随机振动陀螺表头安装位置响应曲线图5 陀螺表头安装位置响应曲线图Fig.5 Gyroscope response curves
2 IMU组合质心调整
减振组件的弹性中心与系统的质心不重合,会导致系统在不同自由度上的振动之间发生耦合。通过精确测量质心并予以调整的方法是降低线角耦合程度常见的解决方案。尽管空间八点减振布局形式在一定程度上可以抑制线角耦合现象,但受限于内减振IMU组合相对较小的跨距,弹性中心与质心不重合带来的影响相对于外减振系统更为敏感。工程上一般采用天平式平衡机,通过定点添加配重的方式实现受试系统的静平衡,再根据配重的质量作用于三维模型上反求系统的质心。
2.1 天平式平衡机配平机理
天平式平衡机对不平衡量的放大系数高、测量精度高,具有成本低、维护简单的优点。受试IMU组合通过平衡工装转接到大梁上,工装与大梁靠面紧贴保证其安装精度,如图6所示。
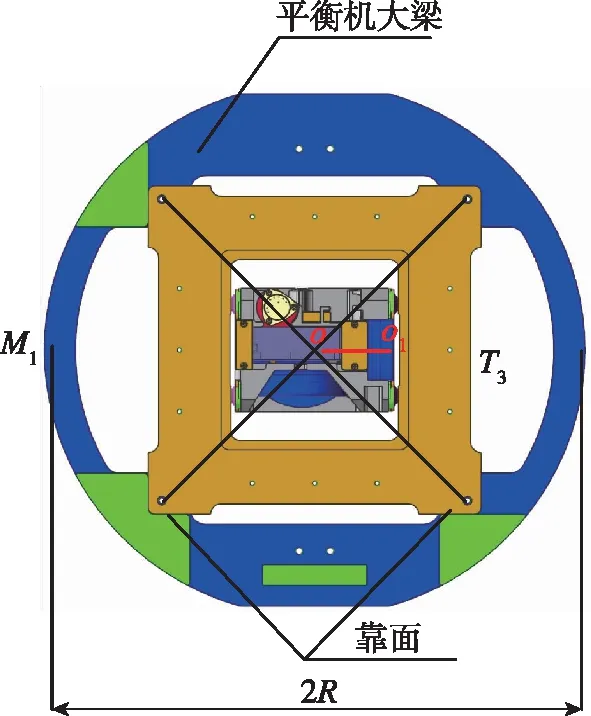
图6 IMU组合安装示意图Fig.6 IMU installation diagram
假设平衡机的旋转中心为点,惯导系统的质心为点,二者距离为;再设平衡工装存在恒定的偏心,导致不平衡力矩为,那么大梁、平衡工装及IMU组合组成的平衡系统会向一侧倾斜,通过在大梁另一侧添加质量为的配重,平衡系统会恢复平衡直至水平仪气泡归于零位,如式(2)
=+
(2)
式中,=,为IMU组合的质量;=,为配重到旋转中心的距离。
保持配重在大梁的位置不变,将IMU组合翻转180°安装,此时大梁失衡向一侧倾斜,通过添加质量为的配重或移动砝码,平衡系统会恢复平衡,如式(3)
++=+
(3)
式中,=,为配重到旋转中心的距离;=,为砝码质量,为砝码移动的距离。
将式(2)代入式(3),可得
(4)
则可以求解IMU组合的质心与平衡机的旋转中心的偏移量。
2.2 IMU组合的调整过程
制作平衡工装如图7所示。经测量,系统向在大梁增加配重3.9g,代入式(3)可得向质心为-0.1mm;系统向在大梁增加配重58.3g,代入式(3)可得向质心为1.49mm;系统向在大梁增加配重26.4g,代入式(3)可得向质心为0.67mm。可见,模型与实物间存在一定的偏差。
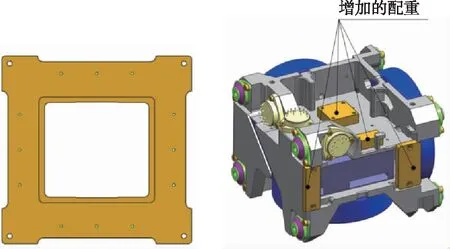
图7 平衡工装及调整后的IMU组合Fig.7 Balance tooling and adjusted IMU
将实测坐标输入模型坐标系后进行调整,在、两个方向增加配重如图7所示。经过平衡机再次测量,IMU组合的质心与弹性坐标系重合度在0.1mm以上,如表2所示。
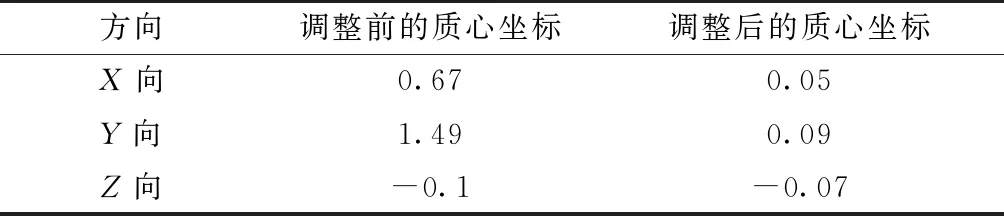
表2 调整前后的质心对比
3 试验验证
随机振动试验前,将IMU组合安装到壳体中组成完整的捷联惯组,如图8所示。在安装过程中,由于减振器拧紧力矩的不同会导致IMU组合角速度输出幅度的大幅变化,因此必须采用等力矩方式紧固减振器。

图8 捷联惯组系统Fig.8 Strapdown inertial navigation system (SINS)
在垂台和滑台按图3进行振动试验,光纤陀螺1ms采样、1ms导航、5ms记录。减振器谐振频率、放大倍数、减振效率、角速度输出最大值等如表3所示。三向振动时三轴陀螺角速度输出如图9所示。可以看出,IMU组合在具备良好的力学环境适应性时,减振效率均不低于42%,角速度不大于11(°)/s,对比工程经验四点减振IMU组合角速度一般为20(°)/s,具备较佳的角速度输出特性,能够有效抑制圆锥运动。通过调平质心IMU组合仍有11(°)/s的角速度,除IMU组合自身具有线角耦合的缺点外,与8只减振器未匹配刚度、未调整压缩量也存在一定关系。

表3 随机振动试验结果
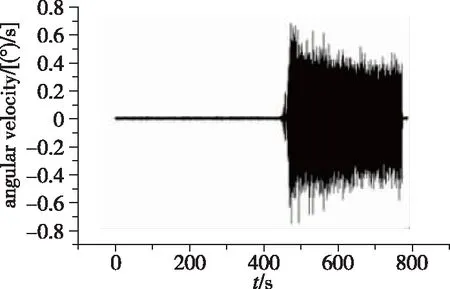
(a) X向振动X陀螺输出
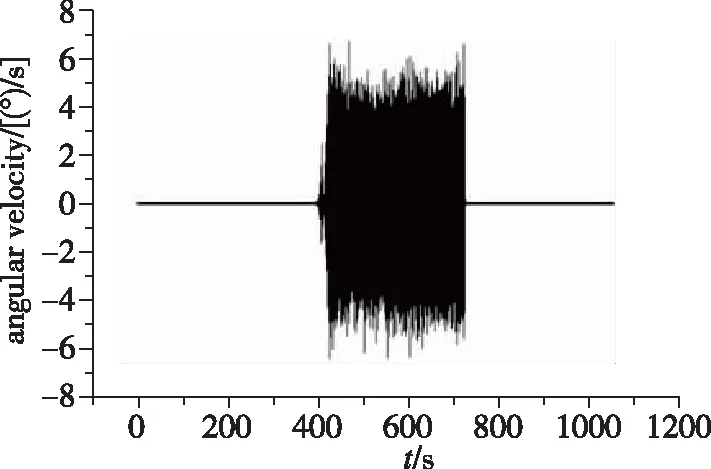
(b) X向振动Y陀螺输出
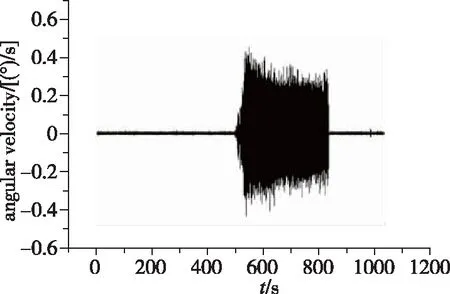
(c) X向振动Z陀螺输出
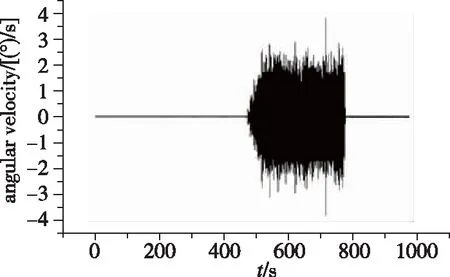
(d) Y向振动X陀螺输出
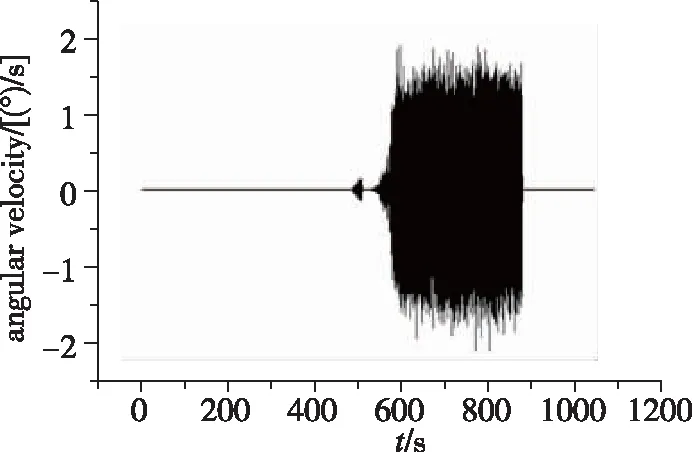
(e) Y向振动Y陀螺输出
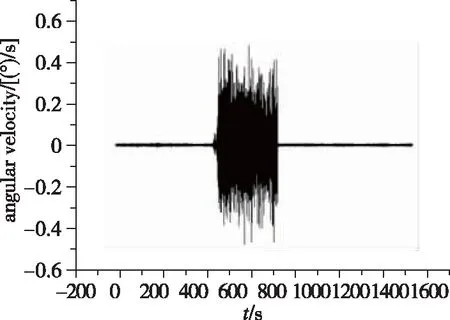
(f) Y向振动Z陀螺输出
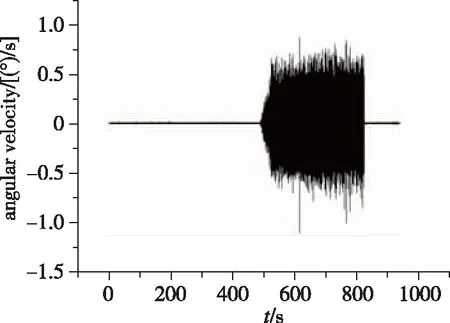
(g) Z向振动X陀螺输出
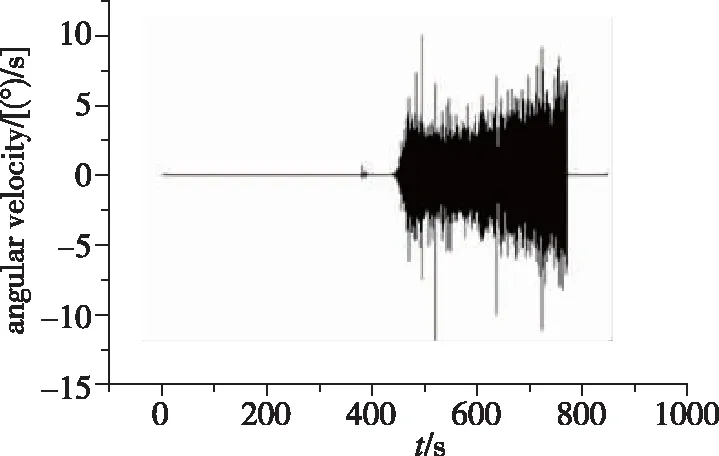
(h) Z向振动Y陀螺输出
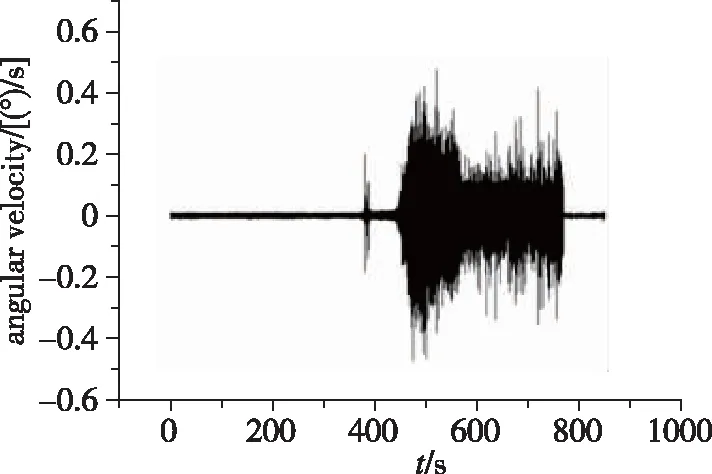
(i) Z向振动Z陀螺输出图9 三向振动时三轴陀螺角速度输出Fig.9 Gyroscope outputs in vibration of three directions
4 结论
本文阐述了捷联惯组IMU结构设计要点,讨论了抑制线角耦合的措施,给出了调整质心的方法,并以实例演示验证了设计方法的正确性和有效性,主要结论如下:
1)增大减振器跨距同时调整质心与减振中心的重合度是提升捷联惯组IMU性能的有效措施;
2)在减振组件尺寸受限的情况下,可通过调整减振器布局的方式来增大减振器的跨距,从而降低随机振动条件下的耦合角速度;
3)八点减振布局既能够满足线振动频率尽可能小、角振动频率尽可能大的要求,又可以在空间尺寸不增加的情况下有效增大减振器的跨距,与其他减振布局相比具有明显的优越性;
4)天平式平衡机配平方法不仅简单经济,而且可以实现较高的配平精度,能够满足捷联惯组IMU研制的要求。
猜你喜欢
广东教育·高中(2023年9期)2023-09-28 11:41:28
机械管理开发(2022年7期)2022-08-08 02:29:10
山西建筑(2020年10期)2020-05-19 07:11:02
测控技术(2018年2期)2018-12-09 09:01:02
导航定位与授时(2016年6期)2016-03-16 09:33:28
导航定位与授时(2016年4期)2016-03-16 06:36:51
中国惯性技术学报(2015年1期)2015-12-19 13:11:44
九江学院学报(自然科学版)(2015年2期)2015-11-12 03:35:09
导航定位与授时(2015年5期)2015-03-10 06:09:27
汽车科技(2014年6期)2014-03-11 17:45:36