面向艺术陶瓷异形外曲面设计的三维重构技术应用研究
2022-10-08 08:12马鑫
轻工学报 2022年5期
马鑫
郑州轻工业大学 艺术与设计学院,河南 郑州 450002
0 引言
近年来,随着我国人口红利的逐步消失,制造业必然要向自动化、智能化方向发展,陶瓷行业亦然[1]。可以明确的是,受诸多因素影响,中国陶瓷生产模式的发展方向类似于西班牙、意大利的生产模式,即保留一些特色的、高附加值的、自动化水平高的产品开发和生产,而一些低附加值的、自动化水平低的产品生产则会慢慢转移到其他落后地区和国家。因此对具有高附加值产品特性的艺术化陶瓷制品的开发,已然形成重点发展之势。
目前,消费者对传统简单的艺术陶瓷器具外形已逐渐产生审美疲劳,陶瓷市场开始涌现出越来越多形态各异的艺术化陶瓷品,它们通过多变的艺术造型可以更好地满足受众的审美消费需求。由于我国的艺术化陶瓷生产模式在过去较长时间内都以手工制作为主,这些曲面设计复杂的陶瓷器具在制造过程中往往存在周期长、工作量大、偏差大、成本高等问题。如何从设计源头介入,改进设计方法、缩短设计周期、降低设计成本是艺术陶瓷产业面临的重大挑战[2]。
人工智能推进着创新设计的发展,其中三维重构技术作为计算机视觉技术中的热门研究方向,发展迅猛,并已应用到工业自动化、医疗诊断、自动驾驶等多个领域。在工业设计生产中,利用逆向设计将重构生成的三维模型形态进行优化重塑,即可快速达成设计目的。张越等[3]采用结构光三维扫描仪获取目标物体的三维点云数据,并基于点云距离提取特征信息,将其作为曲面重建的基础,结合泊松曲面重建算法,得到植物叶片的三维重构结果,但重构结构精度较低;苗绘翠等[4]提出了一种基于光度立体技术的改进算法来估算物体表面的反照率和三维形状,但是该方法不适用于图像阴影面积较大的物体;郭伟青等[5]结合单目全景成像机理和二次双曲面镜,提出了一种单目全景立体感知三维重构方法,但该方法重构效率较低,难以推广应用;王理想等[6]采用虚拟现实技术改进三维重构算法,通过三维图像数据解析和处理,构建图像三维数据场,提升图像统计信息表达能力,图像重构精度高于97%。
艺术陶瓷异形外曲面的曲度、痕迹等细节丰富,对于三维重构结果的表达准确性要求较高,而国内对于三维重构在艺术陶瓷设计领域的实践研究几近空白。鉴于此,本文以艺术陶瓷异形外曲面为研究对象,基于王理想等[6]的研究方法,提出一种基于虚拟现实技术的三维重构方案,探讨艺术陶瓷品异形外曲面三维重构设计方案的可行性,探索艺术陶瓷模型设计的新方法,促进艺术陶瓷的产业智能化发展。
1 三维重构方案设计
本文以Visual C++可视化软件和VTK三维图像处理软件作为三维图像重构实现平台,利用具有自带标定功能的相机采集目标物体三维信息,通过面结构光投影技术计算空间物体表面点的空间坐标[7],在全卷积网络输入层、卷积层、激活层等多个网络层的共同作用下,完成艺术陶瓷异形外曲面图像的自动分割,应用包围盒法三维重构出虚拟现实的艺术陶瓷异形外曲面。艺术陶瓷异形外曲面三维重构方案流程图如图1所示。

图1 艺术陶瓷异形外曲面三维重构方案流程图Fig.1 3D reconstruction flow chart of special-shaped outer surface of artistic ceramics
1.1 外曲面图像采集
采集目标物体三维信息的相机布置方式一般有两种,即平行光轴布置和立体视觉汇聚布置(见图2)。针对艺术陶瓷品异形外曲面的复杂情况,本文采用立体视觉汇聚布置方式,用三脚架固定自带标定功能的相机,调整合适的相机高度和焦距,可以在接近汇聚点位置获得更好的深度分辨率,获取的陶瓷照片即为本研究的基础样本;利用面结构光投影技术得出空间物体表面点的空间坐标,搭建三维空间坐标系和二维观测坐标系,测量几何原理示意图如图3所示。

图2 两种相机布置方式Fig.2 Two kinds of camera arrangement
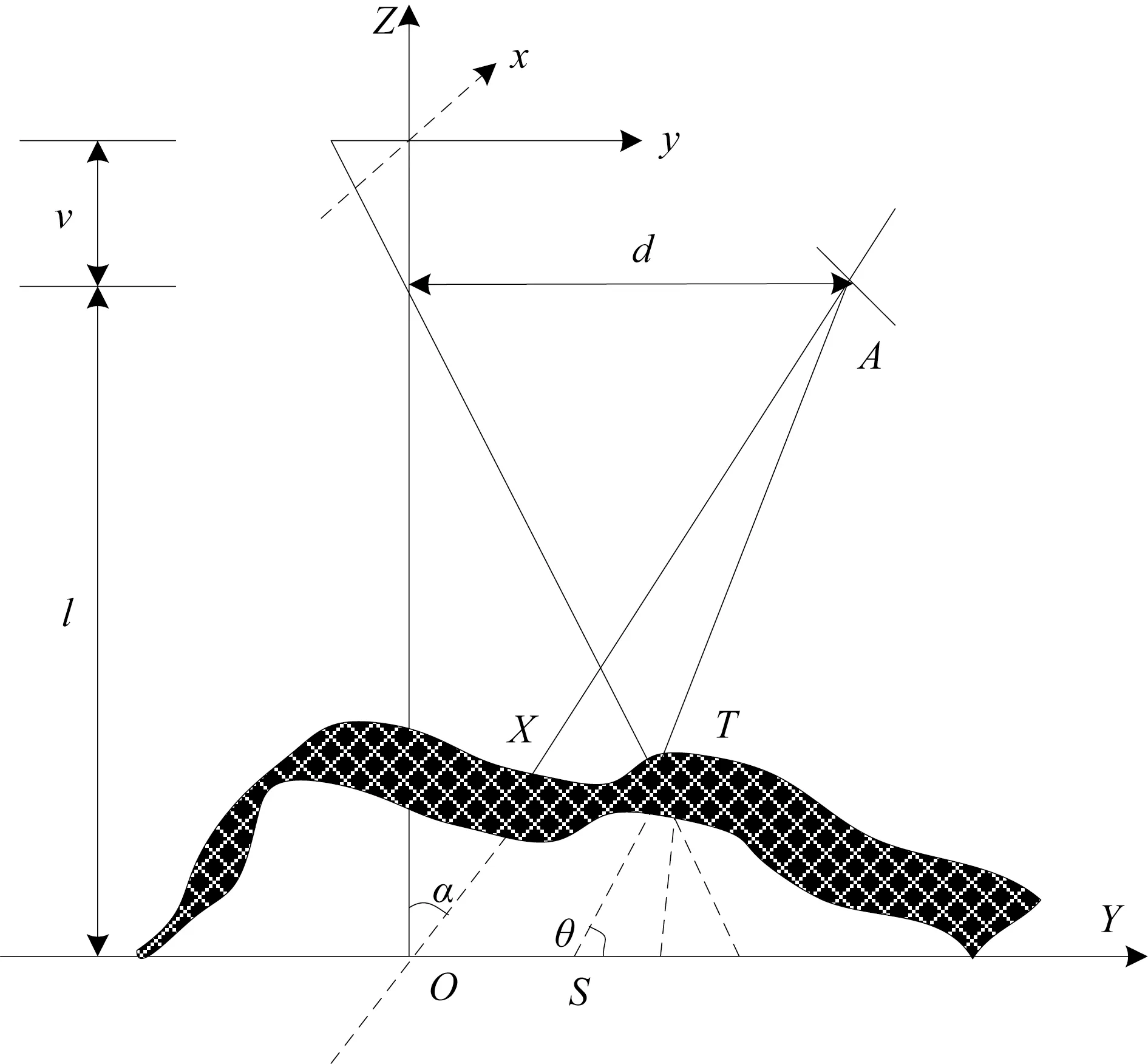
图3 测量几何原理示意图Fig.3 Measuring geometric principle diagram
对于艺术陶瓷品异形外曲面上的任意一点T,根据空间坐标与观测坐标之间的函数关系(见式①),可得出该点对应的空间物体表面点的空间坐标,继而可获得艺术陶瓷品异形外曲面三维参数测量结果。

①
其中,(XT,YT,ZT)表示点T在空间坐标系内位置;t表示成像平面上的观测点;(xt,yt)表示观测坐标系内点T位置;a、b、c表示关系函数;l表示投影仪光心与Y轴之间的距离;d表示投影仪光心与Z轴之间的距离;v表示成像平面与摄像头光心之间的距离;θ表示投影平面与参考平面之间的夹角;S表示投影平面在Y轴上的截距。
1.2 外曲面图像预处理与分割
考虑到艺术陶瓷品外曲面形状不规则,在进行三维重构之前需要进行图像预处理和图像分割。为增强图像特征边缘的清晰度,本文基于中值滤波原理[6]进行图像预处理:首先,定义大小合理的滤波窗口,设置可滑动的窗口模板;然后,按照从大到小的顺序排列整个图像所有的像素值;最后,将滤波窗口置于图像内进行滑动,实现图像滤波处理。
全卷积网络可实现任意大小图片输入的像素级图像分割,卷积层数为4层的全卷积网络结构见图4。本文采用全卷积网络对艺术陶瓷异形外曲面图像进行自动分割,在输入层、卷积层、激活层等多个网络层的共同作用下,可完成艺术陶瓷品异形外曲面图像的有效分割[8]。在图像自动分割网络中,输入给定的目标图像像素,并设置图像分割类别(目标前景和目标背景)。在实际操作过程中,输出值为1时,表明该像素属于目标前景,输出值为0时,表明该像素属于目标背景。以通道j的像素为例,其对应输出概率p表示为
其中,ηj表示通道所对应的图像像素,φj表示像素分割结果,k表示正则化项。

图4 全卷积网络结构Fig.4 Full convolution network structure
基于输出概率计算结果,得出图像像素的预测分割结果为

艺术陶瓷异形外曲面图像预处理与分割的具体流程如图5所示。
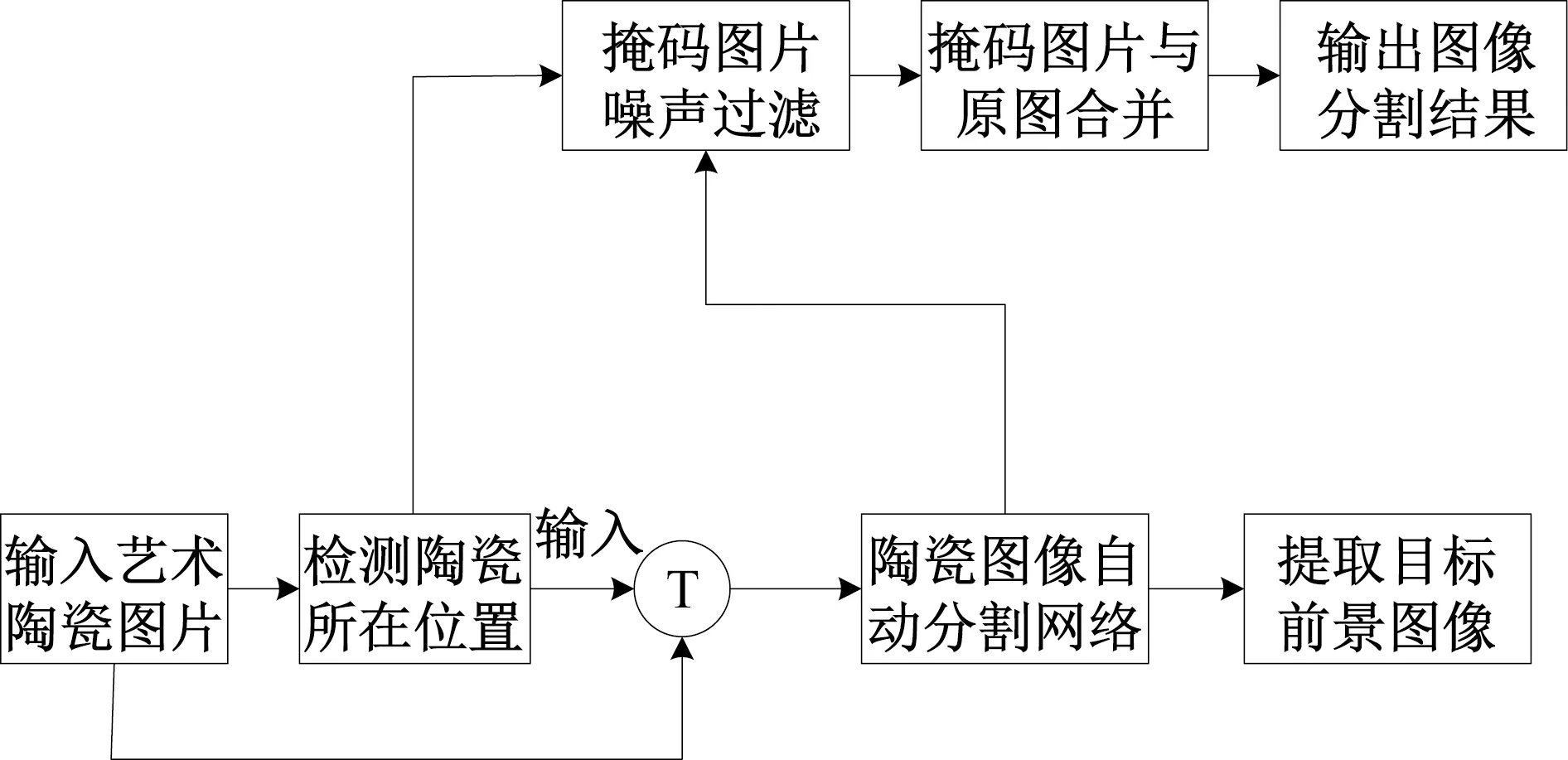
图5 艺术陶瓷异形外曲面图像预处理与分割流程Fig.5 Image preprocessing and segmentation flow chart of special-shaped surface of art ceramics
1.3 基于虚拟现实的三维重构
本方案从分割后的图像中提取特征信息,通过虚拟现实技术进行曲面虚拟空间定位[9],再应用包围盒法实现虚拟现实艺术陶瓷异形外曲面的三维重构。在虚拟现实场景中,应用局部图像梯度信息提取图像数据体的三维坐标。将重构轮廓长度(E)表示为
E=λw1+(1-λ)w2+τL+σr
其中,λ表示灰度权重系数,L表示约束项,r表示稀疏度正则项,w1表示局部灰度信息,w2表示局部梯度能量项,τ、σ表示两个大于0的常数。
针对目标区域、背景区域分别进行平滑处理,并展开平滑度演化博弈,得到如下所示盒子模型:
L=δ×|F|×W
其中,δ表示图像目标区域像素稀疏度正则项,F表示背景区域像素稀疏度正则项,W表示原始图像某一目标点的横坐标。
采用包围盒法求解图像边缘像素点的局部高斯概率[10],从而得出稀疏度正则项r,具体计算公式为
②
基于式②可以得到图像数据体三维坐标:
在上述基础上,利用虚拟现实技术得到可视化重构结果[11],建立三维重构数据场:

其中,∂表示三维重构数据场;ι表示Dirac函数,用以描述图像映射的动态点。
1.4 外曲面重构输出
在三维重构数据场内,结合艺术陶瓷异形外曲面数据参数信息,得出目标图像的三维虚拟直接体,并得到虚拟纹理贴图和虚拟阵列坐标[12-13]。在实际重构过程中,选取部分像素制作匹配模板,进行匹配分析:
其中,ε表示射线方向角,Q表示3D纹理贴图重构结果,P表示3D阵列坐标参量重构全角度。
根据射线方向,分别对艺术陶瓷品原始异形外曲面梯度模、重构表面梯度模进行极小化运算[14],得出如下所示三维重构输出公式:
2 验证实验与结果分析
2.1 实验环境
实验选用2台佳能PowerShot SX740 HS相机、1台投影仪、1台计算机(ThinkPad T450 Intel(R) Core(TM) i5-5200U CPU @ 2.20 GHz,8 G RAM),以及夹持固定装置,搭建双目结构光视觉识别采集平台,作为艺术陶瓷异形外曲面图像采集工具,平台示意图如图6所示。采用Matlab 2020b平台进行实验仿真。

图6 双目结构光视觉识别采集平台Fig.6 Binocular structured light visual recognition acquisition platform
2.2 结果与分析
1)按照本文方案,首先对艺术陶瓷异形外曲面图像进行3个环节的分割,分别是标准分割结果掩码处理、添加全局颜色空间模型、提取目标前景图。经过上述处理流程,得到三维重构所需的基础图像(见图7)。其次将分割处理后的图像通过虚拟现实技术进行三维重构处理,最终形成图8所示的重构结果。

图7 图像分割示意图Fig.7 Schematic diagram of image segmentation
由图8可以看出,采用本文提出的三维重构方案得出的艺术陶瓷异形外曲面重构结果具有良好的视觉表现力,保留了原始陶瓷图像的绝大部分图像信息,该方案重构性能良好。为了更清晰地判断该方案的优越性,以图7a)为样本,分别采用本文方案、基于点云数据的三维重构方案[3]、基于光度立体技术的三维重构方案[4]进行外曲面三维重构,重构数据相对偏差结果如表1所示。由表1可知,本文方案的三维重构精度最高,对细节还原更有效。

图8 三维重构结果模型示意图Fig.8 Schematic diagram of the 3D reconstruction results of the model

表1 不同方案三维重构数据的相对偏差Table 1 The relative deviation of different scheme of 3D reconstruction data contrast %
2)为进一步验证本文方案在多元化设计应用中的有效性和适用性,对多种具有不同外观形态特点的异形陶瓷曲面图像进行三维重构,并进行粗略渲染以增强视觉效果,结果如图9—11所示。图9a)是一件雪豹陶瓷品摆件,此类动物题材作品往往造型生动,外观、动态细节信息丰富,对三维重构精度要求很高。由图9b)可以看出,这只雪豹重构三维模型经过粗略渲染后,较好地体现出雪豹的匍匐姿态,对动势、身型、肢体动作等诸多异形不规则曲面形态有着准确、完整的还原处理。粗略渲染后的模型清晰度完全可以配合设计师使用其他软件对形态进行设计再处理。

图9 雪豹陶瓷摆件三维重构模型Fig.9 3D reconstruction model of snow leopard ceramic ornaments
图10a)是一件明显保留手工痕迹的陶瓷花插,整体看来器型曲面并不复杂,但器身遍布节奏变化的制作过程的痕迹,口沿也有不规则的丰富变化,这样的陶瓷器能传递出质朴、稚拙的美感特性,是现代人们追求的审美体验。由图10b)可以看出,重构模型显示出外曲面痕迹微曲的丰富变化,表明本文方案在处理类似不平整形态外曲面时具有良好的适用广度。

图10 陶瓷花插三维重构模型Fig.10 3D reconstruction model of ceramic flower inserts
图11a)是一件艺术风格强烈的陶瓷艺术作品,以茶壶的造型为蓝本,壶身和壶盖造型夸张,加之壶身双层镂空,空间形态变化巨大,异形外曲面细节异常丰富,对于测试本文提出的设计方案,具有一定的挑战性。从图11b)可以看出,重构模型外观还原准确,虽然在双层镂空等细节信息还原能力略显不足,但重构模型结果仍然具有良好的视觉表现力,保留了原始陶瓷图像的绝大部分图像信息,重构性能令人满意。

图11 艺术陶瓷壶三维模型Fig.11 3D reconstruction model of art ceramic pot
3 结语
针对艺术陶瓷品具有复杂异形外曲面的特点,本文利用Visual C++和VTK软件,采用虚拟现实技术,提出一种对艺术陶瓷品异形外曲面有效的三维重构方案:利用立体视觉原理和面结构光投影技术采集艺术陶瓷异形外曲面图像;采用均值滤波方法对采集图像进行预处理,并采用全卷积网络进行艺术陶瓷异形外曲面图像自动分割;设计虚拟三维数据场,在数据场内制作三维直接体,生成陶瓷异形外曲面重构结果。验证实验结果表明,采用该方案能够有效提取艺术陶瓷丰富的外曲面二维图像信息,获取的异形外曲面立体图像分割结果清晰、特征完整,得到的艺术陶瓷品异形外曲面重构模型视觉效果好,保留了原始陶瓷图像的绝大部分图像信息。与其他方法相比,本方案重构的三维模型精度更高,细节还原效果更好。本文设计方案可为缩短艺术陶瓷品设计生产周期、控制成本提供技术支持,并使智能化交互设计成为可能,具有巨大的应用前景和市场潜力。它在促进设计思维模式革新的同时,也拓展了三维重构的应用范围,为产品自动化设计生产打下基础,探索了陶瓷产业模式创新和发展的新思路。
猜你喜欢
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
中国生殖健康(2020年7期)2020-12-10
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
数学大世界(2018年16期)2018-07-30
卷宗(2017年16期)2017-08-30
商周刊(2017年6期)2017-08-22
汽车与安全(2017年7期)2017-08-03
汽车与安全(2017年6期)2017-07-25