基于新型双环控制的LC型逆变器研究
2022-10-08 07:08施建强
上海交通大学学报 2022年9期
大力发展清洁能源,用风电、光伏发电等可再生能源代替煤炭为主的火力发电,是我国能源领域落实“碳达峰、碳中和”目标的重要途径.作为可再生能源并网以及交直流电网互联的接口,LC型逆变器的优化控制尤为关键.为提高LC逆变器的性能,实现对指令电压的精确跟踪,同时快速响应负载变化,国内外学者进行了大量研究.基于状态空间理论,王念春等设计带负载电流前馈的电压电流双环比例积分(PI)控制,保证了系统的快速性和高稳定性.张雪妍等通过引入虚拟阻抗,将逆变器等效为理想电压源,从而抑制负载扰动时的暂态电压波动.尹球洋等在电容电压外环、电感电流内环双环控制基础上采用负载电流直接前馈,有效抑制了负载扰动对输出电压的影响.曹文远等则将负载电流视为扰动,通过扰动观测器观测后、前馈至电压环控制器的输出端,进而提高系统的抗扰性能.结合扰动观测器和重复控制的优点,Wu等设计基于内模原理的扰动观测器,有效提高了逆变器的跟踪性能和输出电能质量.Kim等利用负载电流观测器补偿负载的不确定性以实现最优电压控制.为抑制逆变器带非线性负载时的电压谐波,提高输出电能质量,苗德根等提出了基于多谐振控制器的前馈策略.袁义生等提出一种二自由度PI控制方案,通过两组PI参数分别调节系统的跟踪和抗扰性能.区别于传统控制策略,李冬辉等基于混杂自动机模型设计了控制器,有效降低并网电流的畸变率,提高逆变器的抗干扰能力.
临床上面对“镜面人”这类罕见病例,外科医生手术治疗应站在内脏器官反位的角度去思考和操作,并精细分辨除脏器反位以外的解剖结构变异,积累经验,提高诊治能力。
针对传统双环PI控制时LC型逆变器电压跟踪和抗负载扰动性能不足的问题,本文设计了一种新型电压电流双环控制策略,其主要改进有3点:① 通过引入虚拟阻抗以及特定的参数设计将电压环整定为无超调的一阶惯性环节,从而改善传统双环控制电压跟踪性能不足的缺陷;② 负载投切时,为抑制双环控制下的电压突变,采用次速电流环控制提升电流环的响应速度;③ 定性分析了负载突变时系统电压电流的变化情况以及电压恢复期出现超调的原因,然后运用误差传递函数进行定量分析,并据此提出了基于自适应积分器初值的电压恢复期超调消除策略.最后通过MATLAB/Simulink平台仿真,对所提方法的可行性和有效性进行验证.
1 传统电压电流双环控制
1.1 LC型逆变器的主电路结构及数学模型
图1为三相LC型逆变器的主电路结构,是采用三相全桥拓扑、逆变器的3个桥臂中点接LC滤波器.在图1中,为滤波电感;为的寄生电阻;为滤波电容;为直流母线电压;、和为逆变器输出电压;、和为滤波电感的三相电流;o、o和o为滤波电容的三相电压;o、o和o为逆变器三相负载电流;为负载.

对于图1所示的逆变器主电路,同步旋转参考坐标系下的电压电流方程为

(1)

(2)
式中:和分别为电感电流的和轴分量;和分别为输出电压的和轴分量;o和o分别为电容电压的和轴分量;为角频率;o和o分别为逆变器负载电流的和轴分量.
1.2 传统电流环控制策略


经过前馈项补偿后的电流环等效控制框图如图3所示(解耦后的和轴控制结构相同,仅以轴为例).

由图3可得电流环的开环传递函数为

(3)
观察到开环传递函数的固有极点=-接近原点,这将导致系统的瞬态响应速度较慢,为了改善电流环的开环频率特性,通过设置零点=-/消去该极点,令

(4)
此时,电流环闭环传递函数为

(5)
式中:为电流环闭环带宽,=/,越大,电流跟踪速度越快,但一般要远小于开关角频率.
由式(4)和式(5)可得电流环PI控制器参数为

(6)
1.3 传统电压环控制策略
将电流环等效为一个增益为()的控制环节,为消除式(2)中的耦合电流o和o及负载电流o和o对电容电压的影响,同样加入前馈补偿,电压环的解耦控制如图4所示.



此时电压环的开环和闭环传递函数分别为

(7)

(8)
社会化媒体不断丰富,新闻传播速度不断加快,新闻传播内容逐渐丰富。借助手机摄影,可以实现新闻快速传播,但其中也存在一定的问题。本文结合多方资料展开调查研究,首先对手机摄影打破传统新闻传播的格局进行阐述,并分析了手机摄影给新闻传播带来的负效应,针对手机摄影应用提出相应策略建议,希望对手机摄影应用起到相关指导作用。

(9)
式中:为阻尼比;为无阻尼自然频率.
将式(9)代入式(7)可得

(10)
孟导把这个小疑问暂时抛在脑后,急忙发问:“既然是乾隆年间的古钱,再怎么也有几百年了吧,怎么就不值钱?”

(11)


(12)
由式(12)可得

(13)
由相位裕度的定义和式(10)可得

(14)
式中:为电压环相位裕度.根据带宽的定义和式(11)可得

(15)
式中:为电压环带宽.由式(13)~(15)可得

(16)
增大可以减少超调,但不能完全消除超调,增大可以加快系统的响应速度,而由式(16)可知,和受电压环带宽制约此外,还受相位裕度约束,根据控制理论,为了保证系统的稳定性,应取30°~60°兼顾电压环跟踪性能和稳定性要求,取=45°,代入式(16)可得此时=042
2 引入虚拟电阻的电压环
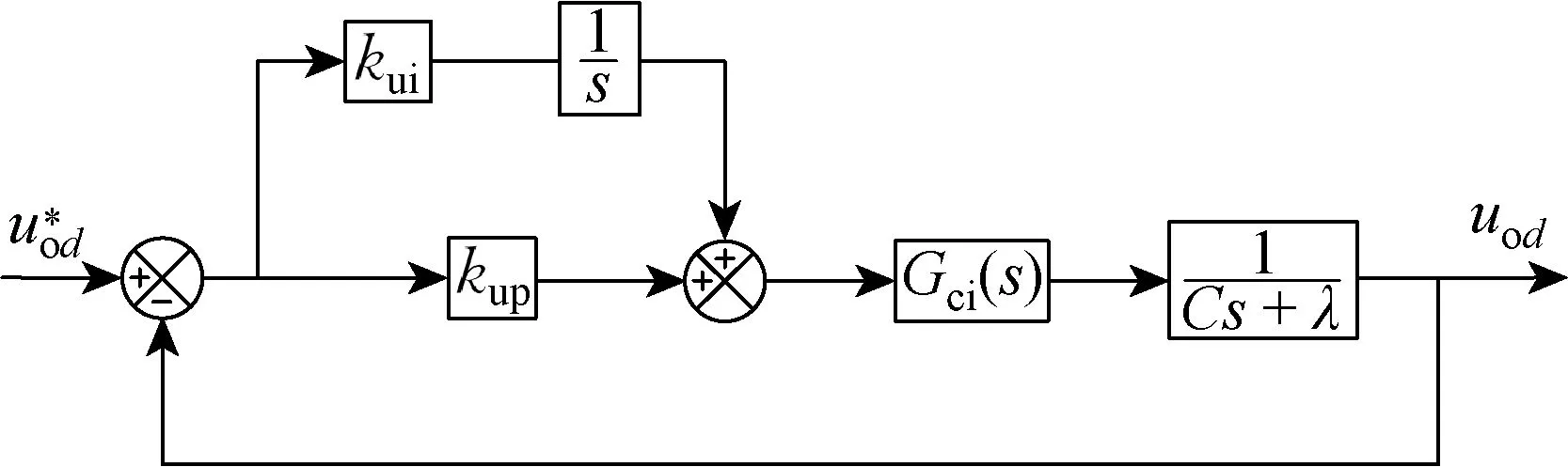
为进一步提高系统的指令跟踪性能,在电压环PI控制器的输出端加入虚拟电阻项,得到图6所示的改进电压环控制框图.图中,为虚拟电阻的倒数,引入变量是为了与电流环传递函数形式统一而便于分析.

同样假设()=1,由图5和图6可得改进电压环等效控制框图如图7所示(以轴为例).可知,加入虚拟电阻相当于在电容两端并联阻值为的电阻.
计算可得,当光源中心波长分别为325 nm、488 nm和632 nm时,半周期内的线性斜率分别为0.123 0、0.008 2、0.006 3.可知中心波长越长,系统的工作范围越大,但会降低线性斜率导致系统分辨力下降.在选择光源的时候,一方面要求系统的工作范围适中,另一方面又要求有足够高的斜率来保证系统的分辨力.因而,本文系统中选用中心波长为488 nm的激光器作为光源.
电压环的开环传递函数为

(17)
其形式与电流环开环传递函数相同,同样采取零极点相消的方式,令
本文使用LDC1000 金属探测传感器快速跟踪直径为0.8 毫米的铁丝形成的跑道,对几个模块的选择进行了比较,分析了各模块的工作原理及优缺点,并对跟踪算法进行了详细设计和分析,保证了跟踪的可靠性,并且还提高了小车的跟踪速度。最终结果表明,所设计的跟踪车能够快速稳定地跟踪,在检测到硬币时可以发出警报,并且智能小车可以在行驶时实时显示时间和里程。但是自动循迹过程中偶尔会存在冲出赛道以及蜂鸣器误报现象,其中有可能存在元器件性能不稳定、接触不良、接线不稳等情况,也存在程序不够优化,未能找到最佳参数,使时间不是最优。
由式(8)可知,当电流完全跟踪时,电压环在给定作用下表现为一个二阶系统, 令

(18)
此时,电压环闭环传递函数为

(19)
由式(19)可知,此时电压环等效为一阶惯性环节,因此可消除跟踪阶跃信号时产生的超调现象.由式(18)和式(19)可得电压环PI控制器参数为

(20)
为分析和验证改进电压环的性能,采用与传统电压环PI控制器相同的和.由式(9)和式(20)可得改进电压环的控制器参数设计式为
上林苑作为汉代京都著名皇家苑囿,其方幅广狭、周遭界限在当时显然周知、并无疑义。扬雄《羽猎赋》、张衡《西京赋》等作品均已言之凿凿,记载关中地理的《三辅黄图》关于这一点也记载明晰。司马相如的《上林赋》为什么要把上林苑的四界范围写得不可捉摸。我们发现,其根本原因在于司马相如《上林赋》彰显帝王声威的创作目的与上林苑地理范围格局相对有限之间的矛盾。
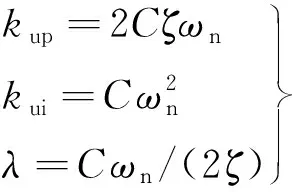
(21)
3 双环抗负载扰动策略
3.1 阶跃负载扰动下的系统暂态响应分析


由图2可得

(22)



(23)
设为截止频率,根据式(10)和截止频率定义,则有

(24)
阶跃负载扰动作用下,系统存在单方向偏差,电压环控制器积分状态值不断累加,只有出现反向偏差后,电压环控制器积分状态值才会减小.结合式(24)可知,当电容电压上升至指令电压值时,此时由于积分状态值大于0,do/d>0,电压仍继续上升,所以,在受负载扰动后的恢复过程中,必然存在电压超调现象.
3.2 提高电流环响应能力的次速电流环
综上可知,投入大容量负载时,电压跌落值取决于电流环动态响应能力,电流跟踪速度越快,电压跌落值越小,系统暂态响应性能越好.而电流环性能受逆变器直流侧电压制约,为了使电流环在指定直流电压约束条件下达到最快的调节速度,改善系统在负载扰动下的电压突变情况,根据文献[15],引入次速电流环控制器,以轴为例,其控制电压为
二维基本流动的三维线性稳定性分析也称为BiGlobal型线性整体稳定性分析[8]. 假设q(x,y,z,t)=(v,p)T为三维不可压流场的速度场和压力场, 则三维流场可以分解为二维基本稳态流场,和三维正则模扰动之和, 形式如下

(25)
式中:为电流误差带,太小会导致控制量频繁切换影响稳态性能,太大则达不到最速控制的效果,因此,需根据系统的扰动情况选择合适的值.假设完全解耦,次速电流环等效控制框图如图8所示.
或等式

由式(25)可知,突加负载扰动时,次速电流环控制的策略下,=i=/2;突减负载时,=i=-/2,代入式(1)可知,突减负载时电感电流的变化率高于突加负载时,这意味着采用次速电流环控制策略时,突增负载扰动时的电压突变情况同样比突减负载时严重.
3.3 基于自适应积分器初值的电压恢复期超调消除
由阶跃负载扰动下的系统暂态响应分析可知,在阶跃负载扰动下,电压恢复期存在超调现象,为抑制扰动时的电压畸变,改善系统的暂态响应,需要设法消除超调.因此,在引入虚拟电阻的电压环以及次速电流环控制策略的基础上,以轴为例,进一步研究扰动后电压恢复期超调消除策略.
将式(9)代入式(8)可得
在电压恢复期时可认为电流完全跟踪,由图7可知,采用引入虚拟电阻的电压环控制策略时有

(26)
式中:为电压环积分器状态值,且
=u
(27)


(28)
当系统稳定时,u近似为0,由式(28)可得

(29)
式中:为系统稳定时的积分状态值.将式(29)代入式(28)整理得误差动态方程为
图7为不同能量的激光作用下,熔融物喷溅速率。从15 J开始,材料出现明显的喷溅,随着激光能量的增加喷溅速率增大,并且在激光能量超过20 J之后,喷溅速率增加得更快。蒸发反冲压力所带来的物质喷溅的速度在10 m/s范围。与实验结果相比,计算得到的喷溅速率在量级上一致,但大能量激光作用下趋势略有不同,这是由于实验误差与理想的计算模型共同带来的。

(30)
对式(27)和式(30)进行Laplace变换,经过整理得误差传递函数为

(31)

将式(18)代入式(31)整理可得

(32)
如果能使误差按指数收敛,可消除电压恢复期的超调现象,观察式(32), 若等式

(33)
1407 Association between type 2 diabetes mellitus and hepatitis B virus-related hepatocellular carcinoma: a prospective cohort study

(34)
成立,均可使误差按指数收敛.将式(29)分别代入式(33)和式(34)可得对应的解分别为


(35)

(36)
系统开机运行即零状态起动时,o(0)为0,显然(0)也应为0.由式(35)和(36)可知,当o(0)=0时,式(35)不恒为0,式(36)才是满足条件的解,此时可得

(37)
将式(37)进行Laplace逆变换可得

(38)


(1) 初始化.系统开机运行,此时积分器重置触发信号RST为0,持续检测当前电压误差,当|u()|<时,判断系统进入稳定状态.
(2) 稳定状态.系统稳定运行,此时如果检测到当前电压误差|u()|>,则判断系统受到扰动,进入电压突变期.
Bin 707:名字源于波音707,而非酒窖编号,多产区混酿的单一品种赤霞珠葡萄酒,首个年份1964。
(3) 电压突变期.此时电压快速下降(突增负载)或上升(突减负载),比较当前电压误差和前一时刻电压误差,如果|u()|<|u(-1)|,则系统到达电压最低或最高点,此时积分器重置信号跳变为高电平,系统检测到RST的上升沿,将状态值按式(36)重置,进入电压恢复期.
(4) 电压恢复期.此时电压误差按指数收敛,因此不存在超调,直到|u()|<,系统重新回到稳定状态,循环执行程序.
4 仿真验证
在MATLAB/Simulink平台中搭建LC型逆变器的仿真模型,对两种控制策略下系统的电压跟踪性能以及负载突变时的抗扰性能进行对比分析,三相LC型逆变器的系统参数如表1所示,其中,为开关频率,为额定频率,为额定功率,为额定电压.传统双环控制和新型双环控制策略采用相同的PI控制器参数,并按式(6)和式(21)整理得出.
选用压强速度耦合SIMPLE算法求解,控制残差收敛精度10-5,预设迭代步数为10000步,进行稳态流场计算。求解过程中监测并绘制均衡室进口压力和溢流室压力变化曲线,压力稳定时计算结果收敛。

4.1 满载启动仿真结果
由图10(a)和10(b)可知,满载起动时,传统双环控制下轴电压的超调为39.9%,需要 0.019 s 达到稳定状态,而新型双环控制下超调仅为1.9%,调节时间也仅需0.005 s.
由图10(c)和图10(d)可知,采用传统双环控制时,起动过程中的A相电压峰值为417.1 V,电压冲击较高,不利于设备的安全运行.而新型双环控制下,起动过程中A相电压波形接近期望的正弦波.因此,采用新型双环控制可以有效减小起动过程中的电压超调,从而抑制起动过程中的电压冲击,改善带载起动性能并且提高系统的动态响应速度.

4.2 突减负载仿真结果
初始时,逆变器满载运行,0.105 s时切除负载.图11为该工况下两种控制策略的仿真结果.由图11(a)和11(b)可知,突减负载时,采用传统双环控制策略时轴电压突增45.9%,达到453.77 V.在轴电压从最高点开始恢复至稳定值的过程中存在超调现象,约0.01 s后系统恢复至稳定状态,这一过程中,A相电压峰值为451.12 V.

由图11(c)和图11(d)可知,若采用新型双环控制策略,突减负载时轴电压仅升至358.98 V,A相电压峰值为358.46 V,在轴电压由最高值恢复至稳定值的过程中不存在超调现象,并且仅需0.004 s系统即可恢复稳定状态.因此采用新型双环控制,突减负载时A相电压波形畸变程度小.
4.3 突加负载仿真结果
初始时,逆变器空载运行,0.205 s时投入10 kW负载.图12为突加负载时传统双环及新型双环控制策略的仿真波形.由图12(a)和12(b)可知,采用传统双环控制策略,在0.205 s时投入负载时,轴电压降至190.62 V,A相电压峰值降至189.14 V,系统恢复至稳态所需的时间为0.017 s,同时在电压恢复期存在超调现象.
美国人鲁道夫·阿恩海姆在《艺术与视知觉》中写道:“中国风景画的空间建立是运用重叠的技巧。在中国画中建立起山峰与山峰,白云与白云间,纵深的相对位置,也是通过折叠的方式建立。那些山峰的形体一般都被描绘成阶梯组成的构架或者犬牙交错的峭壁。这样就通过使不同平面的重叠构成了一个整体。这个整体看上去是一个弯曲的复杂的固物体。”[10]332西方油画与中国传统绘画有别,西方油画中由主景和许多小景点组成,这种焦点透视并不能解释郭熙《早春图》移动空间构建的实质。因为,《早春图》的创作源自中国画的散点透视,其移动空间构建的核心即为“步步移,面面观”的移动视点所构成。
在图12(c)和图12(d)中,采用本文所提新型双环控制策略,在投入负载的过程中轴电压仅下降至197.82 V,A相电压峰值下降至197.83 V,电压恢复期无超调,系统恢复至稳定状态所需的时间也仅为0.004 s.此外,通过对比图11和图12中突减负荷和突加负载时的电压突变情况,也验证了前文中突加负载扰动下的电压突变比突减负载时严重的结论.

5 结论
针对采用传统电压电流双环控制的LC型逆变器,本文首先结合时域数学模型和复频域传递函数对系统进行定性和定量分析,在此基础上改进了电压环和电流环,并据此提出了新型双环控制策略.最后,在MATLAB/Simulink平台中搭建模型,对比不同工况下采用新型双环和传统双环控制时逆变器的性能表现,仿真结果表明:
(1) 所提新型双环控制策略有效地减小了阶跃指令作用下的电压超调,提高了系统的动态响应速度,改善了系统的跟踪性能.
采集层负责收集物理环境下人体各类活动数据。采集层包括多个传感器节点,每个传感器节点由传感器、MCU、电源管理和网络组成;在本系统中主要采用心率传感器、心电电极贴、血氧采集传感器、血压传感器和红外体温传感器等,用来实时获取在押人员心率、心电、血氧和血压等重要生命体征参数。采集层节点通过各传感器感应被测人体参数和指标,并将数据上传至数据传输层。
(2) 在大负载投切时,新型双环控制策略能有效抑制扰动下的电压突变,缩短恢复时间,提高系统的暂态响应能力和抗扰性能.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
上海师范大学学报·自然科学版(2022年3期)2022-07-11
中国自行车(2022年3期)2022-06-30
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
内燃机与配件(2022年2期)2022-01-17
当代化工(2020年4期)2020-08-24
网络空间安全(2019年8期)2019-03-18
电机与控制学报(2018年9期)2018-05-14
河北渔业(2014年11期)2014-11-17