RobotStudio软件在ABB工业机器人课程教学中的应用
2022-10-07 14:05朱巍峰
黑龙江科学 2022年17期
朱 勤,朱巍峰
(苏州工业职业技术学院,江苏 苏州 215104)
随着我国智能制造业的发展,工业机器人作为其中的重要组成部分已经被广泛应用到了各种领域。我国已成为工业机器人的应用大国,但工业机器人技术人员存在大量缺口。为了满足社会对工业机器人人才的需求,各大院校都开设了工业机器人技术专业,主要培养学生对工业机器人的操作、编程调试、系统集成、维护维修等能力。工业机器人应用是工业机器人技术专业的核心课程,其中工业机器人手动操作能力是最重要的基础技能。苏州工业职业技术学院开设了工业机器人专业,并在众多工业机器人品牌中选择了ABB机器人作为教学载体。在课程设置的能力目标中,将熟练操作机器人列为最基本技能,要求学生能够将智能操作机器人移动到准确的位置,调整好正确的姿态,进而完成各项任务。如果学生的手动操作没有掌握好,则会给后续的编程调试学习带来很大难度。在教学过程中,由于学生手动操作掌握不足带来的问题主要包括设备碰撞、定位不准确、轴配置错误等。在教学过程中,教师发现使用仿真软件进行辅助教学能够有效提高学生的手动操作能力,减少以上问题的发生。
1 手动操作机器人技能的学情分析
ABB机器人手动操作共包括单轴、线性和重定位三种模式,如图1所示。
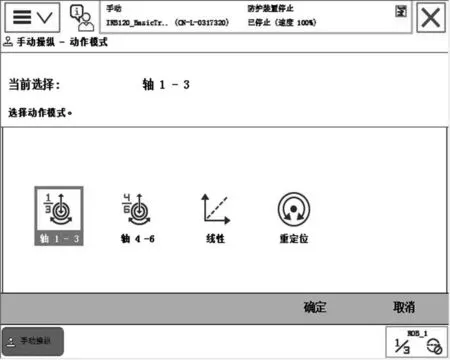
图1 ABB机器人三种操作模式Fig.1 Three operation modes of ABB robot
第一,单轴模式最为直观,使用摇杆控制机器人每个轴的转动。例如,摇杆左右控制机器人1轴旋转,摇杆上下控制机器人2轴旋转。学生只要明确摇杆方向和机器人轴旋转方向的对应关系,就可以正常进行机器人的操作控制。这种模式是学生最容易掌握的,但是由于单轴模式的运动方式是每个转轴的旋转,所以无法使机器人以直线运动。
第二,线性模式能够使机器人在空间中做直线运动,运动方向也很直观,是以三坐标的XYZ方向进行运动,它的难点在于坐标系的选择。在使用线性模式之前,必须要先确定使用哪种坐标系。ABB机器人共包含4大坐标系,分别是大地坐标、基坐标、工具坐标和工件坐标。其中,大地坐标和基坐标都是不变的,学生在学习时比较容易理解和接受。但工具坐标和工件坐标是可变的,要根据实际工作情况自行设定。由此可见,线性模式是非常灵活的,但也代表其使用起来更为复杂,学生在学习过程中需要通过大量练习和实践来加深对线性模式的理解和掌握。
第三,重定位模式的运动方式是围绕一个固定点进行旋转,使用时一般会选择工具坐标作为旋转的基准,也可以选择其他三种坐标系作为基准。在此种模式下,机器人的运动范围和幅度是最小的,但是旋转方向的判断是三种动作模式中最难的。当工具更换后,工具坐标发生变化,旋转的方向也会随之发生变化,对于学生来说掌握难度又会有所提高。
三种运动模式都具有各自的特点和作用,在实际的工作任务中,学生应能够综合运用这三种动作模式。例如,使用夹爪搬运工件,学生需要将机器人的夹爪移动到抓取工件的位置,先使用单轴模式调整夹爪的姿态,然后使用线性模式将夹爪移动到工件附近,最后用重定位模式对姿态进行微调。在此过程中,学生需要熟练掌握三种模式的使用,如果运动方向判断错误,就有可能造成夹爪和工件的碰撞;如果轴的旋转角度使用错误,就可能造成关节限位,无法到达夹取位置;如果学生操作不熟练,导致操作时间过长,就可能造成任务无法按时完成,教学效率下降等问题。
2 工业机器人课程教学存在的问题
2.1 课堂教学时间不足
由于工业机器人手动操作的实践性较强,仅靠课堂教学时间是远远不够的,因此必须安排大量练习时间,才能使学生达到一定的熟练度。苏州工业职业技术学院的工业机器人实训室共有9套工业机器人实训台,能够保证4人共享一台设备。一个课时平均分配,每人只有11 min的操作时间,如果再减去教师讲解演示的时间,则留给学生的操作时间更少。如果增加课时来训练学生的手动操作能力,则不利于后续编程调试等难度更高课程的进一步开展。如果手动操作的课时安排太少,学生的手动操作能力不足,也会对后续的编程调试任务产生影响。
2.2 学生学习能力存在差异
在实际教学中由于不同学生的学习能力和动手能力都存在较大差异,部分基础较弱的学生无法在规定的操作时间内掌握操作技能,就必须把设备让给其他同学。当有学生在操作中遇到困难的时候,就需要教师能够即使进行现场指导,帮助解决问题。如果同时有多位学生需要求助教师的时候,教师则很难兼顾到每个学生,导致课堂效率和教学效果不佳。
2.3 机器人类型不够多样
ABB机器人的型号多种多样,其手动操作方式也不尽相同。受场地和经费等问题的限制,学校实训室无法配备所有类型的机器人。高校通常都使用小型的六轴工业机器人,如IRB20型机器人,大型工业机器人配备不足,这样会导致手动操作的内容不够完整。
3 RobotStudio仿真软件在工业机器人课程中的应用策略
3.1 改善教学组织方式
本校在工业机器人课程教学中引入了RobotStudio仿真软件,这是ABB公司的工业机器人仿真软件,这个软件的机器人库中包含了ABB所有型号的工业机器人。将实际实训台通过建模导入到软件中,通过创建机器人系统,开发了仿真实训台。在仿真实训台中能够完成与实际实训台中相同的操作,便于学生在课下进行手动操作练习,如图2所示。

图2 仿真工作站Fig.2 Simulation workstation
在仿真实训台的基础上重新组织教学过程。采用课前、课中、课后相结合的混合式教学模式。将手动操作三种模式的操作过程制作成视频,学生在课前自学视频内容,然后在仿真实训台上进行操作练习,这样可以使学生在课前完成对一些流程性的知识点和技能点的学习。在仿真软件中进行操作练习的过程中,学生可以通过网络向教师请教操作中遇到的问题,教师能够及时答疑解惑。在课堂环节中,教师可以减少对理论知识的讲解,重点组织学生讨论操作中发现的问题,安排学生在实际实训台上进行操作验证和考核,使教师可以在有限的课堂时间内,对学生的操作规范和熟练程度进行评价,并提出整改意见。在课后,学生可以根据课堂中发现的问题,进一步锻炼并提高自身操作能力。
3.2 完善教学内容
高校应配备大型的四轴工业机器人、平面关节型机器人、并联型机器人、双臂协作型机器人等各类型机器人,使学生能够掌握更多类型机器人的手动操作技术。将RobotStudio仿真软件应用于不同类型的工业机器人操作中,加强对不同类型工业机器人的手动操作练习,如图3所示。
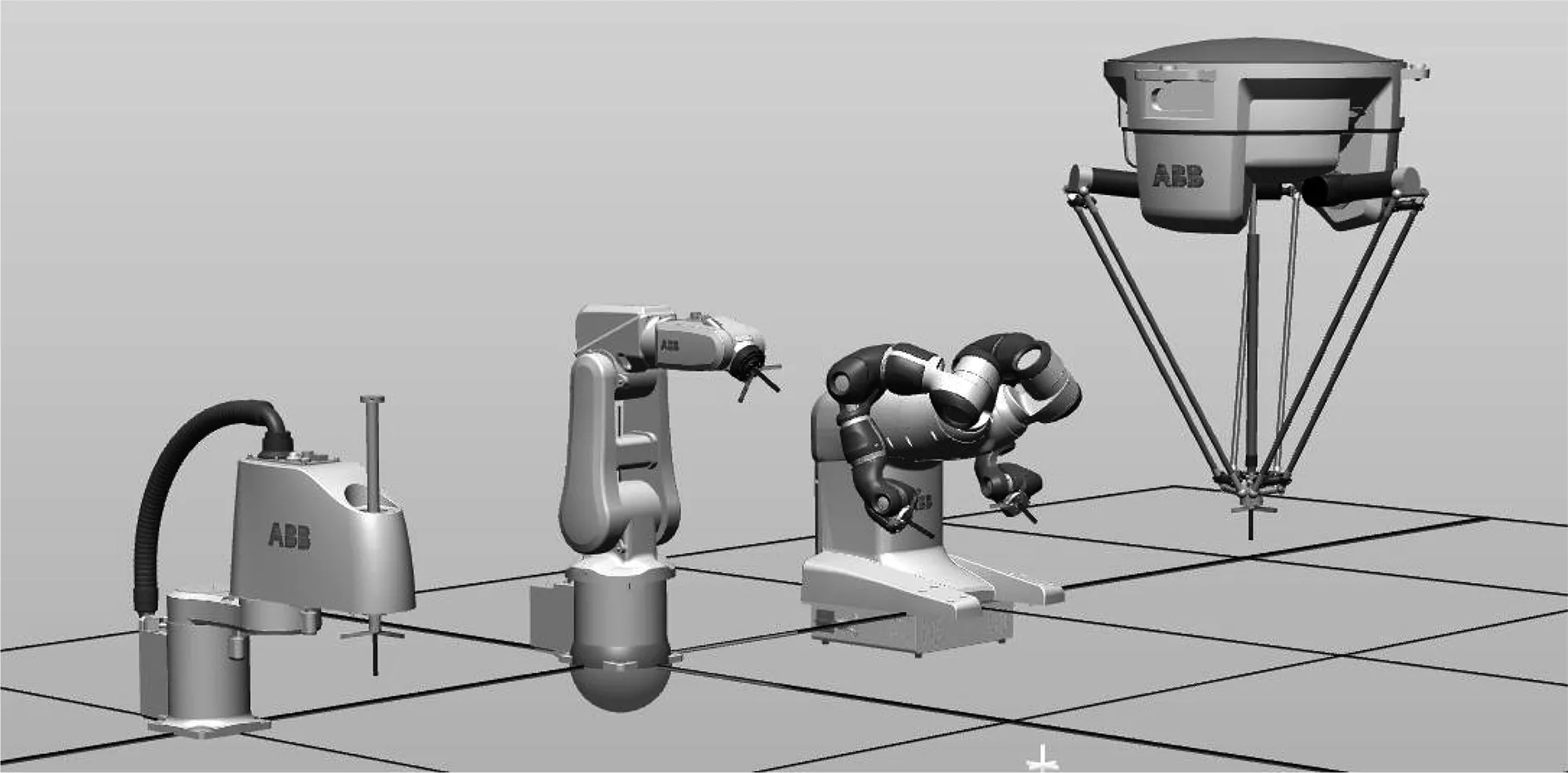
图3 多种类型的工业机器人Fig.3 Many kinds of industrial robots
3.3 更加贴近生产实践
手动操作的目的是将机器人的工具移动到具体的工作位置。实训室中,基本使用的是小型机器人,其工具和工件的结构比较简单,一般不需要考虑工具及工件的形态,工具和工件之间的干涉较少,操作难度较低。学生认为此类手动操作比较简单,不愿意投入过多时间进行练习以提高操作水平。在实际的工业领域中,工业机器人在汽车生产线中的应用十分广泛。在车门安装工序中,由于车门较大且形状不规则,因此用到的工具也较大且结构比较复杂,如图4所示。在这种情况下工具和工件的干涉,以及在搬运过程中和周边设备的干涉就非常复杂,对于手动操作的要求也非常高。利用RobotStudio软件将车门安装这一实际生产环节制作成仿真工作站,可以让学生直观地感受不同的生产实践对手动操作的要求。

图4 车门安装Fig.4 Door installation
3.4 激发学生的创造能力
应用RobotStudio软件进行辅助教学还能激发学生的创造能力,学生可以在仿真软件中改变工作站的各项参数,体验在不同参数下机器人操作的不同之处。学生也可以利用仿真软件还原工业机器人的各种实际应用场景,还可以按照自己的想法自行设计不同功能的仿真工作站。
4 结语
对RobotStudio软件在工业机器人手动操作教学中的应用展开研究,通过教学实践验证后,发现使用RobotStudio软件进行辅助教学起到了良好的教学效果,学生对手动操作的认知更加深入完善,更加重视对手动操作技能的掌握。在课外通过软件进行练习,为学生提供了更多操作时间和机会,提升了教学效率和教学质量。教师从以往的讲授演示转变为引导学生自主学习,从而取得了更好的教学效果。可见,进一步开发RobotStudio软件在工业机器人课程教学中的应用具有重要意义。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
智能制造(2021年4期)2021-11-04
计算机与数字工程(2021年7期)2021-08-08
小太阳画报(2020年11期)2020-12-10
小太阳画报(2020年10期)2020-10-30
作文·初中版(2020年9期)2020-10-12
红领巾·成长(2018年10期)2018-11-19
读者(2017年18期)2017-08-29
世界汽车(2016年8期)2016-09-28