基于重叠网格的大型船舶纵向航态与阻力数值预报
2022-10-02 08:29王家宏王伟军艾万政
科技创新与应用 2022年27期
王家宏,王伟军,艾万政
(浙江海洋大学,浙江 舟山 316022)
随着船舶大型化和快速化的发展,对船舶的各项性能提出了更高的要求,船舶阻力是船舶的主要性能,是船舶水动力性能研究的重点和难点之一,船舶阻力的准确预报对船舶性能评价、船型设计与优化有着重要意义。随着计算机技术的发展,数值模拟法成为船舶阻力预报的重要手段。数值模拟法包括势流理论流体力学(Computational Fluid Dynamics,CFD)方法。由于势流理论不考虑流体黏性,在计算复杂流场时存在偏差,因此CFD方法应用的越来越广。Choi[1]、郑小龙[2]和胡俊明[3]等通过数值计算与试验数据的对比,表明CFD方法可以满足工程精度。虽然计算精度较高,但是没有考虑船舶航行时的船舶姿态。随着船舶大型化和快速化的发展,固定状态下的数值模拟方法已经不能满足大型船舶在高弗汝德数(Fn)范围内的阻力预报。
本文采用雷诺平均方程(Reynolds Averaged Navier-Stokes,RANS),结合重叠网格(Overset Mesh)技术和动态流体-物体相互作用(Dynamic Fluid Body Interaction,DFBI)方法,对KCS(KRISO Container Ship)集装箱船进行了纵向航态与阻力预报研究。所得数值模拟结论与物理模型试验结果吻合度较高,表明该方法预报船模阻力及姿态具有良好的精度,并且简单高效,具有重要的工程实用价值。
1 模拟对象
本文的研究对象为KCS标准集装箱船,是国际拖曳水池协会(International Towing Tank Conference,ITTC)推荐的数值计算船型之一。此船型具有大量公开的试验数据可供检验和验证,本文所用试验数据来源于Tokyo CFD研究会和SIMMAN研究会。为与试验数据进行对比,本文采用缩尺比为λ=31.6的模型,模型附带舵。模型如图1所示,具体参数见表1。
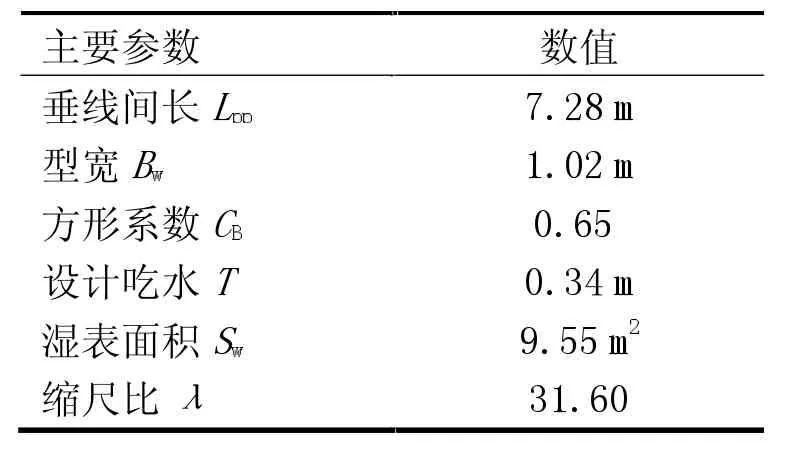
表1 船舶参数

图1 船体几何模型
2 数值模型及网格安排
2.1 计算模型
RANS模型的控制方程组,包括质量守恒方程(即连续性方程)、动量守恒方程。RANS模型的不可压缩控制方程组无量纲张量形式如下

式中:ui为雷诺平均速度分量;P为压强;t为时间;ui’为脉动速度;Re为雷诺数;xi和xj分别为二维空间中的距离变量。
自由液面采用流体体积法VOF(Volume of Fluids)方法进行捕捉。
船舶在水中航行时,船体的升沉和纵倾会发生变化,对阻力的准确预报有重要影响,因此本文放开船体升沉和纵倾2个自由度。
在计算过程中,船舶的航行姿态根据其垂直方向受力变化和y轴方向力矩变化进行实时调整。重叠域中的网格在背景域中进行平移和旋转,主要依据是船体升沉、纵倾。背景域网格不动的好处是,可以有效避免网格变形及重构问题,相对而言,计算量减小,有利于数值模拟收敛。
2.2 边界条件和计算域设置
本文计算采用半个KCS模型,计算时采用对称边界条件,以船模中纵剖面为对称面。为避免计算域边界对计算的影响,本文根据以往研究者的经验[4],计算域入口在船首上游1.5Lpp,出口在船尾下游2.5Lpp,侧面距离船侧2Lpp,顶部距离自由液面1.5Lpp,底部距离船底表面2Lpp处,计算域设置如图2所示。

图2 计算域设置
2.3 网格划分
计算域的网格划分对船舶CFD计算有重要影响,船体在水中的总阻力主要包括摩擦阻力、剩余阻力。船体表面网格的设计会影响到摩擦阻力的计算;而船体周围网格、水线面网格及近壁面网格设置会影响到剩余阻力的计算。本文设计的网格技术是运用重叠网格。计算区域包括2部分,即背景区域及重叠区域。关于体网格,采用切割体网格。为了能捕捉到自由液面和船舶周围的流场信息,在自由液面区域和网格重叠区域采用了网格局部加密技术。关于船体周围的边界层,采用了棱柱层网格来划分,在流场较复杂的区域,如船首、船尾等区域,也进行局部网格加密,以捕获较详细的流动细节。
Realizablek-ε湍流模型对近壁面流场的处理采用壁面函数法,需要检查第一层网格节点布置,y+是第一层网格质心到壁面的无量纲距离,对于Realizablek-ε湍流模型,一般认为30~60为合理。经过对近壁面边界层网格的多次调整,y+值处于30~60,网格如图3所示,总体网格量约75万。边界条件设置见表2。

表2 边界条件情况
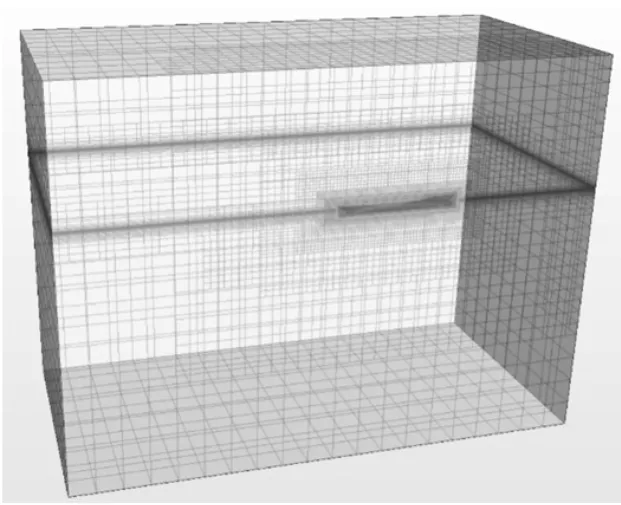
图3 计算域网格
重叠域与背景域之间网格尺寸越接近差值求解精度越高,因此在背景域与重叠域耦合区域,进行网格加密,使该区域网格与重叠域网格尺寸接近。
3 计算结果分析
航行姿态对大型船舶阻力有重要影响。为了研究这一问题,本文分别对KCS船约束模型和自由模型在不同航行速度下的阻力进行了数值模拟计算,其中约束模型没考虑船舶的航行状态,而自由模型却考虑了船舶的航行状态。将数值模拟结果和物理模型试验结果进行对比。试验值为2015年Tokyo研讨会[5]上提供的试验结果,弗汝德数选取0.108、0.152、0.195、0.227、0.260、0.282,结果如图4所示。

图4 总阻力系数对比
船舶总阻力系数Ct表达式为

式中:Rt为船舶总阻力;U为船模速度;ρ为水密度;Sw为船模的湿表面积。
通过图中数据对比可以看出,与约束模型的阻力计算结果相比,自由模型的阻力计算结果与试验结果更加接近,在较高雷诺数时,精度更高。选取Fn=0.260时的2种模型的沿船身浪高曲线与试验值进行对比,如图5所示。
从图5中可以看出,航行于水面的船舶由于航行时产生兴波,沿船体会产生波高差。在约束模型和自由模型下数值模拟得到的沿船身浪高曲线与试验值相差不大,但自由模型得到的结果与试验值更为接近,说明自由模型模拟的航态能更接近试验中船模的航态。

图5 沿船身浪高曲线(Fn=0.260)
通过自由模型和约束模型数值结果的对比,可以看出航态对于船舶阻力的准确预报有很大影响,在预报船舶阻力时,船舶航态不可忽略。
采用自由模型,在船舶初始平吃水状态时,对不同航速下的纵倾和下沉量进行了模拟,采用非定常计算,并将模拟得到的纵倾和下沉量的计算值与试验值进行对比,结果如图6和图7所示。

图6 下沉量对比

图7 纵倾对比
通过图中数据可以看出,船舶的下沉量随着航速的增加而增加,而纵倾变化先随着船速增加而增加,但弗汝德数足够大,即高速时,纵倾值略有减小。模拟得到的下沉量和纵倾与试验值较为接近,说明本文采用的数值方法可以准确地对船舶航态进行模拟。
4 结论
本文基于重叠网格技术,采用RANS方法对KCS集装箱船的纵向航行状态及阻力进行了数值模拟,将数值模拟结果与物理模型试验结果进行了对比,并探讨了船舶航行状态、船舶阻力的预报方法。并形成了如下主要结论。
(1)采用RANS方法和Realizablek-ε湍流模型的数值方法,能够快速准确地预报大型船舶阻力,结果可靠度高。
(2)基于重叠网格技术,可以很好地模拟大型船舶在不同航速下的航行姿态。
(3)通过对自有模型和约束模型模拟计算结果的对比,大型船舶的阻力数值计算应当计及航行姿态,特别是在高航速时,自由状态下模型的计算结果与试验值更为接近。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国舰船研究(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
上海船舶运输科学研究所学报(2021年2期)2021-10-12
疯狂英语·读写版(2021年8期)2021-09-17
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
作文周刊·小学一年级版(2020年8期)2020-05-11
中学科技(2018年6期)2018-09-21