基于WBooster制动系统的试验研究
2022-10-02 05:00马果刘一平吴世林孙智威
装备制造技术 2022年6期
马果,刘一平,吴世林,孙智威
(1.柳州五菱汽车工业有限公司,广西 柳州 545007)
(2.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070)
(3.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
0 引言
目前,线控制动技术主要有电子机械制动系统和电子液压制动系统两种[13]。电子机械制动系统因受限于成本和技术可靠性,较难实现量产规模化使用。电子液压制动系统由于其结构简单、可靠、成本较低,受到诸多公司、科研院所的关注。根据动力源的不同,电子液压制动系统可分为泵式和电机式两种[14]。泵式电子液压制动系统其是通过控制高压蓄能器、电磁阀和泵产生相应的液压力[15]。电机式电子液压制动系统工作时,控制电机直接驱动运动机构推动主缸建压[16]。与泵式电子液压制动系统相比,由于没有高压蓄能器、电磁控制阀等,具有避免泄漏的优势,其安全性和可靠性更好。同时,由于电机式电子液压制动系统电机与传动机构的刚性联接且可控,其建压速度及精度也优于泵式电子液压制动系统。因此,国外零部件巨头针对电机式电液制动系统都推出了相应的成熟产品,如博士iBooster[17]、大陆MK C1[18],其中博士的电液制动系统垄断了90%的市场份额。
由于电机式电子液压制动系统,作为一种高度紧凑的机电液复合产品,其受明显的非线性和不确定性因素影响[19],如摩擦、建模误差、参数扰动等,给液压力的精准控制带来困难。因此电子液压制动系统要实现快速、精准、稳定的建压能力与安全可靠的运行性能,对相应的软硬件技术提出了较高门槛。为打破垄断,国内众多零部件厂商和高校科研机构对电机式电液制动系统开展了研究。如同济大学的余卓平[20]团队设计了一种以蜗轮蜗杆为传动机构的电液制动系统,并针对系统开发了具有鲁棒性的滑模变结构液压力控制算法,结果表明能够有效的实现精准的液压力控制。吉林大学[21]开发了一种机电一体的新型电液制动系统,针对硬件提出了基本助力辅助控制模块、速度补偿模块、惯性补偿模块、摩擦补偿模块相结合的压力控制算法,台架试验表明在控制算法的作用下系统可实现精准的液压力控制。国内的零部件厂商,如芜湖伯特利、拿森、格陆博等也都分别推出了WCBS、NBooster、GIBS产品。为实现关键零部件的自主可控及拓展现有产品线,我司也布局研发了具有自主知识产权的电液制动系统产品WBooster。该产品结构紧凑、压力控制精准、压力响应速度快,且容易通过模块集成技术与其他功能产品融合。为验证WBooster搭载在实车上的制动性能,以自主研发的电子液压制动系统WBooster为研究对象,通过搭建基于WBooster制动系统的实车试验平台测试其静态和行车情况下的工作性能。
1 试验方案设计
试验是检验产品设计可行性及功能有效性的最直接方法,在保证试验安全的前提下,应尽可能对所测试的产品的功能特性展开较详细的试验[22,23],试验平台由硬件系统和软件系统构成。硬件系统是通过改装原有的纯电动汽车底盘进行搭建的,拆除试验样车上原有的基于电子真泵助力的制动系统,将WBooster系统安装到保留原有制动管路的试验车上。通过加装踏板力传感器、踏板位移传感器、制动主缸液压力传感器和车速传感器来测量试验过程中产生的对应物理量。软件系统是采用基于快速原型开发工具链进行WBooster系统控制程序的编译、刷写,并进行试验过程中的测试标定与数据采集。所制定的试验方案如图1所示,并且试验平台在进行实车道路行车制动试验时还必须满足以下试验条件[24,25]:
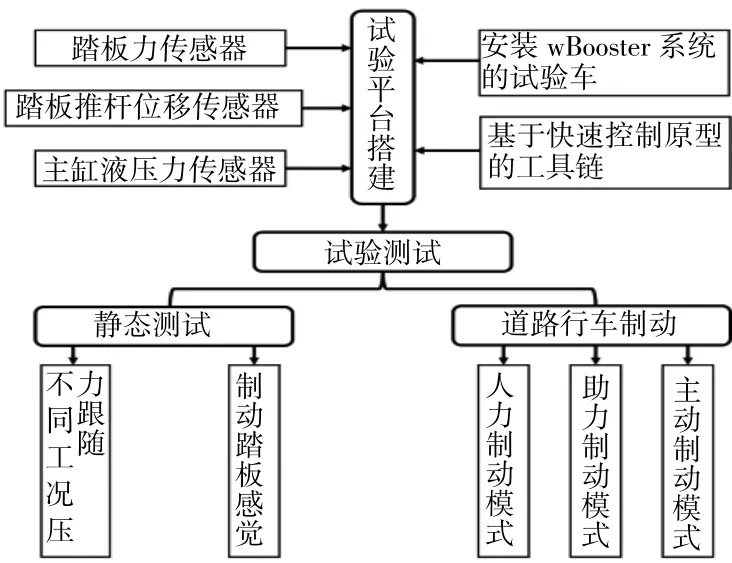
图1 试验方案
(1)试验在高附着(附着系数为0.8)路面进行,且道路应该平坦干燥。
(2)试验环境应该符合试验需求,即在行车过程中驾驶员视野范围的能见度高要使驾驶员能够清晰的掌握试验环境周围情况,并且天气环境应该晴朗无风。
(3)试验前要对实验车辆状况进行全面检查,确认是否具备试验条件。
经过改装后的试验车如图2所示,依据试验方案所开展的道路行车制动试验如情况图3所示。
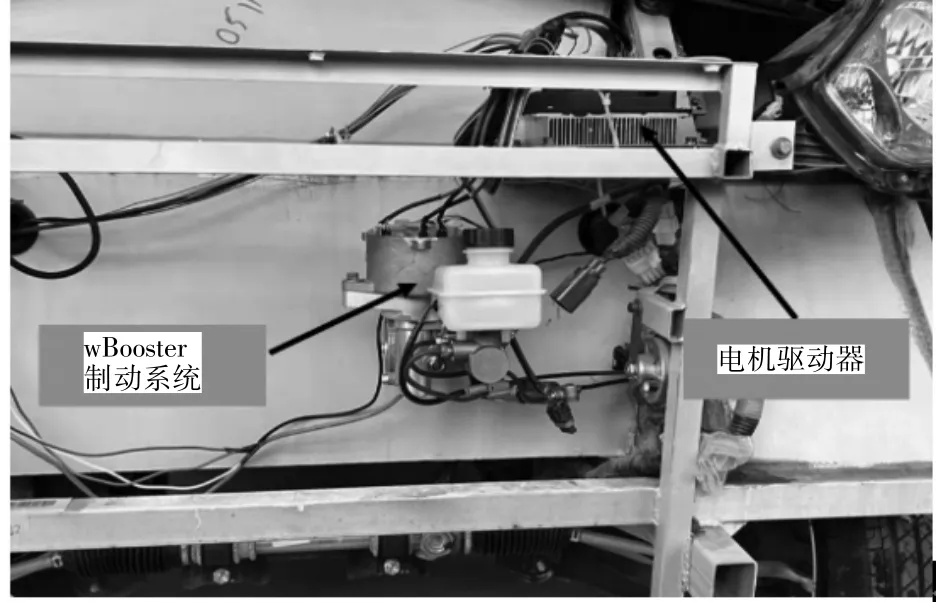
图2 试验车改装
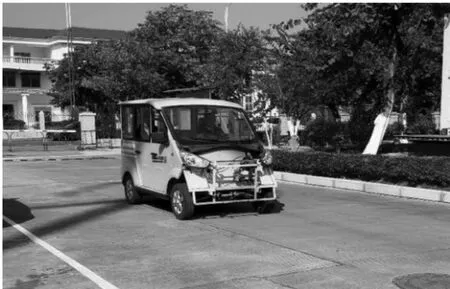
图3 行车制动
2 试验测试
2.1 静态测试
实车静态测试类似于台架测试,但区别与台架测试的地方在于在实车应用环境中对WBooster制动系统的压力响应情况进行试验研究,从而了解系统增压、保压、卸压情况是否适合道路行车试验,从而保障道路行车试验的安全。同时,通过测试制动力、制动踏板位移与制动液压力的关系,研究制动踏板感觉的变化情况。
社团文化是高职院校校园文化的重要组成部分,积极的社团文化有利于更好的为学校学风建设创造良好的环境。如以专业为主题的社团,使学生在专业方面的学习不在局限于课堂,而是通过活动的形式来展现,特别是一些动手要求高的技能型专业,形式多样的教学方式能提高学生学习的热情,从而使学生掀起学习热潮,引领积极良好的学习环境。这些社团都有独特的社团目标,各个目标穿插在平时社团生活中,指引着每个成员完成相应任务,达到既定目标,这样的过程在潜移默化中影响着他们的价值观与人生观。
阶跃变化的液压力对于制动系统来说是一种比较严苛的工况,对于系统压力跟随性能要求较高,在变阶跃工况下的wBooster系统对目标液压力的跟随情况如图4所示。
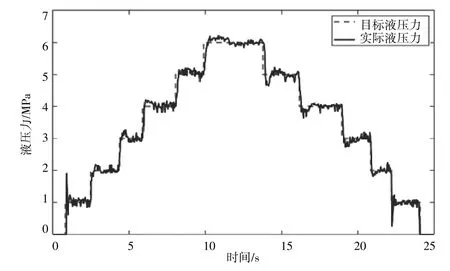
图4 变阶跃压力跟随
如图4所示,变阶跃压力跟随能够准确的跟随目标液压力的变化趋势。在建压过程中,低压力时的超调较为明显,随着压力的增加超调量逐渐减小。在卸压行程中,随着压力的逐渐减小,压力的回冲量逐渐加大。在逐渐增压过程中的响应情况见表1。

表1 变阶跃增压过程中压力变化情况
在幅值为6 MPa周期为3 s梯形压力变化工况以及幅值为6 MPa周期为2 s的弦波工况下,其压力跟随的情况如图5所示。

图5 幅值6MPa周期为3s梯形工况压力跟随
从图5、图6可以看出WBooster系统对不空工况的适应能力比较强,在不同工况下都能够准确的跟随目标液压力的变化趋势。从图6可看出,初始建压时刻系统的压力响应有一定的响应延迟,在建压行程结束后实际也压力并不会直接跟随目标液压力而归零,出现这种现象的原因是制动系统的液压迟滞现象引起的。梯形工况和弦波工况的压力跟随误差均方根值见表2。
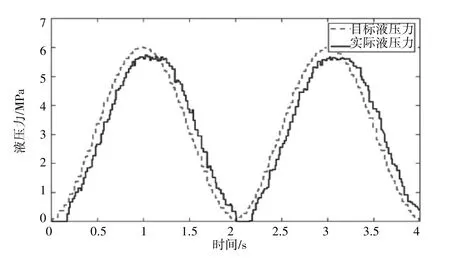
图6 幅值6MPa周期为2s弦波工况压力跟随

表2 不同工况压力误差均方根值
在WBooster系统所产生液压力的方式是根据驾驶员的制动意图进行建压,驾驶员踩制动踏板时产生制动踏板位移,根据制动踏板位移信息判断驾驶员所需目标液压力大小,系统在控制指令下产生相应大小的液压力。经过测试,WBooster能够准确的识别出驾驶员的制动意图,并能够快速的跟随制动意图下的目标制动液压力的变化趋势。根据驾驶员制动意图的压力跟随如图7所示。
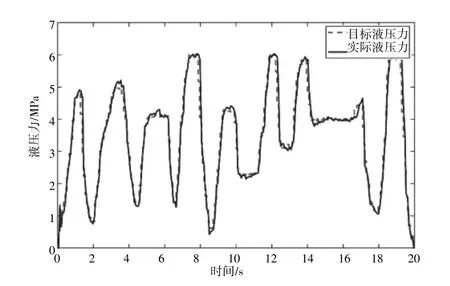
图7 驾驶员制动意图液压力跟随
WBooster制动系统在结构形式上采用全解耦式,即在助力电机正常提供制动助力时制动踏板推杆上的力不会作用与制动主缸推杆,也不会与传动机构上的力耦合。因此,在车辆制动时驾驶员踩制动踏板时的脚感完全由制动踏板模拟器提供。制动时的踏板感觉可以通过两种途径进行调整,其一是通过改变电机助力的空行程进而再改变控制层的查表规则来实现踏板感觉调整,另一途径是通过改变踏板模拟器弹性元件的刚度及阻尼实现。通过调整电机助力空行程的方式改变踏板脚感见表3。
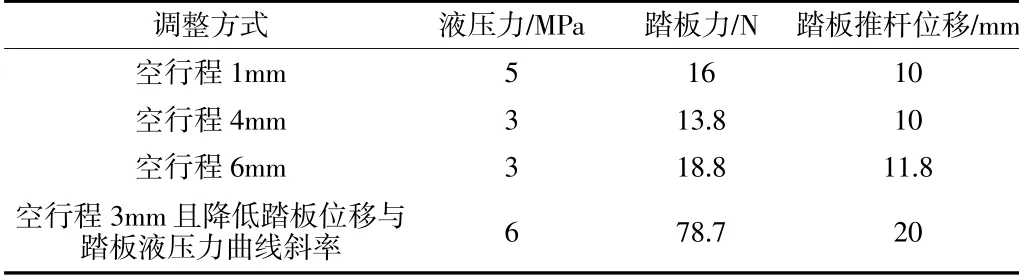
表3 制动踏板感觉调整情况
通过表3可以看出,调整电机助力的空行程可以改变踏板力与主缸液压力之间的对应关系进而改变制动踏板感觉,并不能改变踏板模拟器弹性元件的刚度及阻尼特性,因此无法改变踏板力与踏板位移的关系。所以,对踏板感觉的调整还是应该从根本上改变踏板模拟器弹性元件的刚度与阻尼。
2.2 道路行车制动测试
道路行车制动测试是对WBooster制动系统应用在实车后的性能所做的动态测试。作为电子液压助力制动系统,WBooster系统同样具备助力制动和人力备份制动两种基本功能,同时也可以与感知功能集成具备主动制动功能。再试验过程中,主动制动模式是以直接给WBooster系统下达制动液压力命令实现的。
助力制动是指根据驾驶员踩制动踏板时所产生的制动意图确定驾驶员制动意图对应目标液压力,然后助力电机在控制系统控制下提供制动主缸产生目标液压力所需转矩,在这个过程中主缸产生液压力的动力源只有助力电机。助力制动模式下制动初速度为30 km/h的车辆制动情况如图8所示。
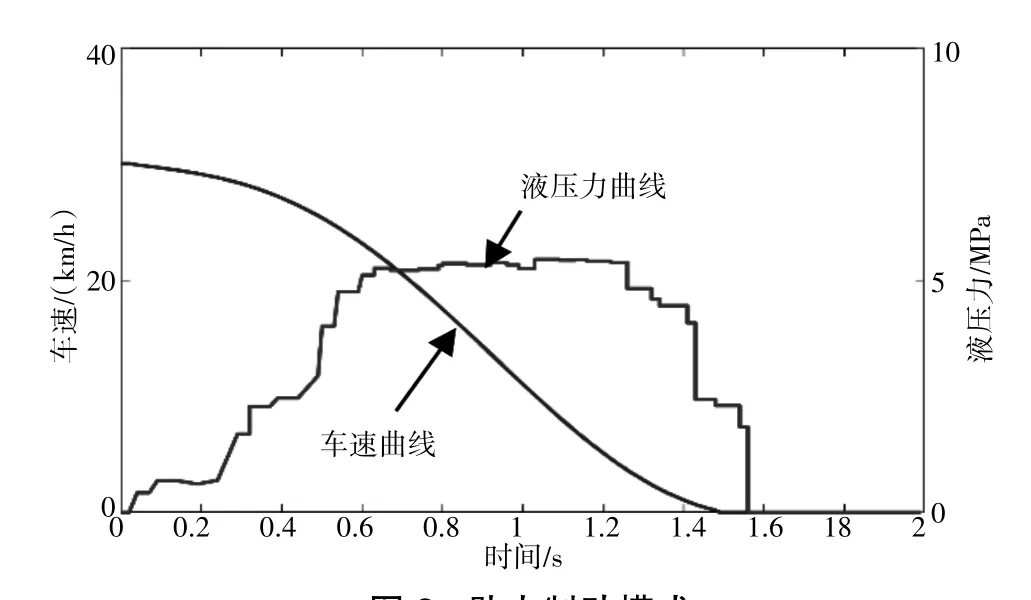
图8 助力制动模式
人力制动是指在WBooster系统因为故障而助力电机无法提供制动动力源时由驾驶员直接通过踩制动踏板提供制动时所需的制动力。因此,这种模式也称为备份制动模式,属于WBooster的冗余安全功能。这种模式下的制动动力源只有驾驶员通过制动踏板推杆作用在主缸推杆上制动踏板力。人力制动模式下车初速度为20 km/h的辆制动情况如图9所示。
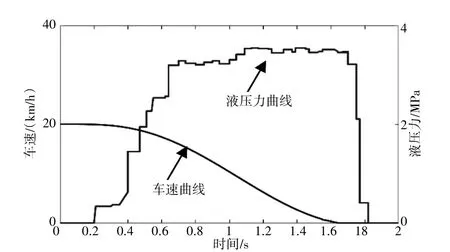
图9 人力制动模式
本研究指的主动制动是指驾驶员没有在制动踏板上施加任何制动力wBooster系统根据试验人员直接下达液压力指令进行建立主缸液压力的制动过程。初速度为28 km/h,制动液压力为3 MPa时的制动情况如图10所示,初速度为33 km/h,制动液压力为5 MPa时的制动情况如图11所示。
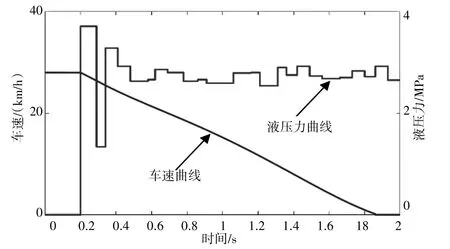
图10 初速度28km/h-液压力3MPa
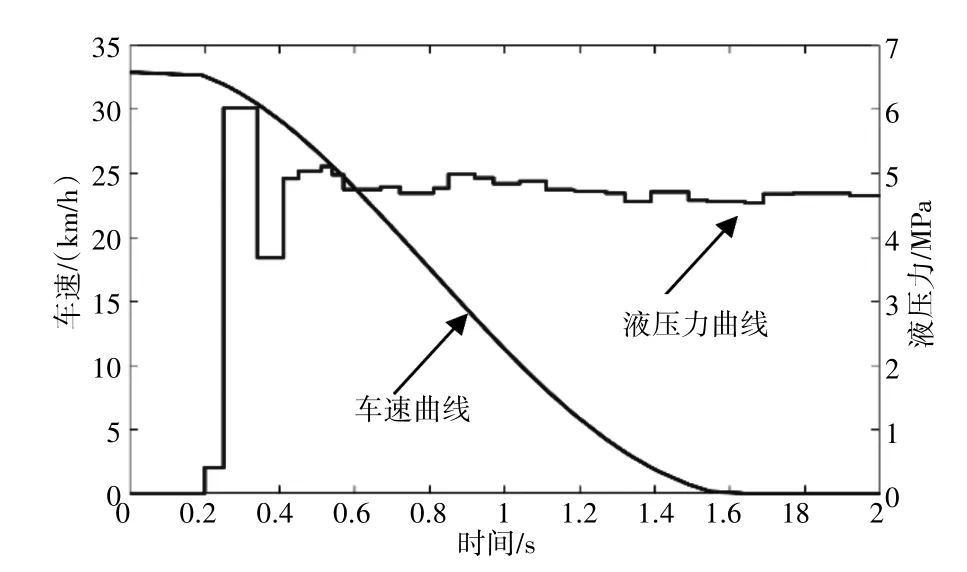
图11 初速度33km/h-液压力5MPa
不同模式下行车制动的具体情况不同,在对应模式下行车制动的制动距离以及车速从初始速度降为0时的制动时间见表4。
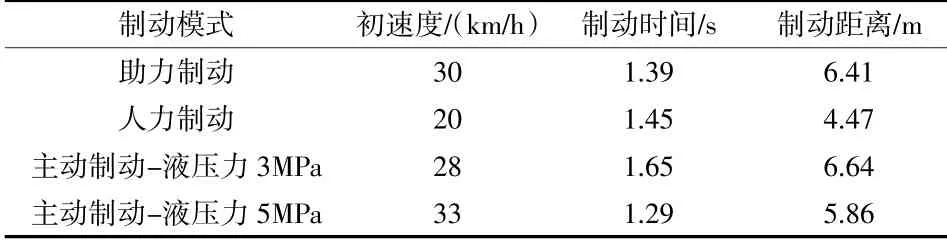
表4 不同模式下行车制动测试结果
3 结语
通过改装现有某款纯电动车底盘,搭建了WBooster制动系统的实车试验平台,并进行了静态下不同工况液压力跟随研究和制动踏板感觉研究,同时进行了不同制动模式下的道路行车制动试验测试,结果发现:
(1)WBooster制动系统能够准确跟随目标液压力的变化,对液压力变化的响应速度较快,且在液压力跟随过程中的误差均方根值较小。
(2)通过调整电机助力的空行程,可以改变制动踏板力与主缸液压力之间的对应关系从而改变制动踏板感觉,但是这种调整并不能改变踏板力与踏板位移的关系,因此通过调整电机助力空行程来改变制动踏感觉的作用是有限的。
(3)在行车制动过程中,WBooster制动系统能够为车辆提供满足制动要求的液压力。在初速度为30Km/h的制动测试中,制动距离远小于国家标准规定的制动距离。通过本文主动制动模式的测试表明,WBooster制动系统可以实现建立在感知模块基础上的主动制动功能。
猜你喜欢
汽车工程学报(2022年5期)2022-10-12
煤气与热力(2022年4期)2022-05-23
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
江苏广播电视报·少儿文学(2019年10期)2019-09-10
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19