一种基于抽取LMS的距离旁瓣抑制方法*
2022-09-28 07:25鲁振兴管吉兴唐程远洪永彬
电讯技术 2022年9期
鲁振兴,管吉兴,唐程远,张 焱,洪永彬,尹 伟
(1.中国电子科技集团公司第五十四研究所,石家庄 050081; 2.中国人民解放军32380部队,北京 100072)
0 引 言
噪声雷达作为现代雷达中一个新的研究领域,由于具有优异的低截获概率特性、抗干扰特性[1-2],以及在目标参数测量方面的良好性能(如无距离、速度模糊),近十几年来得到了快速的发展[3-4]。
在噪声雷达的相关处理中,旁瓣的抑制性能受限于处理时长与信号带宽之积,在积累增益有限的情况下会产生弱目标被发射信号泄漏、杂波以及强目标的旁瓣所淹没的现象。降低信号旁瓣最直接的方法是增大相关处理的时间,此时积累时间内目标的距离走动必须要考虑。然而,受波束驻留时间以及目标雷达散射截面(Radar Cross Section,RCS)起伏等因素的影响,相关处理时间不可能任意增大。为了在有限的处理时间之内尽量降低信号旁瓣,需要考虑一些非传统的处理方式,如CLEAN方法[5]、自适应脉冲压缩[6]、最小均方(Least Mean Square,LMS)自适应算法等[7]。
2004年,Rigling[8]将LMS类型的算法用于噪声雷达距离旁瓣抑制。直到2012年,Meller等[7]才对该类方法进行了较为详细地描述。但是,Meller的方法是基于白噪声假设的。实际系统中,为减小信号峰值损失,可能会以明显大于信号带宽的速率进行采样[9],从而使得相邻采样点之间存在很大的相关性。此时,LMS算法的收敛速度会很慢,权系数在处理片段内可能无法收敛。虽然联合过程估计方法可以提高算法的收敛速度,但是从回归系数到距离单元的转换需要进行矩阵乘积[10],其运算量仍然很大。
本文给出一种基于抽取LMS的距离旁瓣抑制方法,通过多个LMS滤波器并行处理,快速收敛获得低副瓣距离压缩结果。
1 LMS距离旁瓣抑制原理
假设噪声雷达回波信号中包含P个目标,其中第i个目标的延迟为ni,那么接收信号可以表示为
式中:ai为第i个目标回波信号的复幅度,Sr(n)为发射参考信号,S0(n)为接收机噪声信号。
因为目标回波可以看作Sr(n)经过一个线性滤波器之后的结果,所以可以设计一个滤波器,用参考信号经该滤波器后的输出来模拟目标回波信号,滤波器的系数就可以作为回波信号的距离压缩结果。
(1)

滤波器系数α0可以采用维纳滤波算法进行估计,但是该方法需要进行矩阵求逆,运算量很大,尤其是滤波器阶数较高时。为减小计算量,滤波器系数可以通过自适应的方式进行调整,如图1所示。实际中,由于目标回波存在一定的多普勒频率,自适应滤波可以适应目标多普勒频率的带来的系数变化。

图1 自适应LMS滤波器结构
LMS算法是一种简单的随机梯度自适应滤波算法。它不需要进行相关函数的计算,也不需要矩阵求逆,仅仅利用瞬时梯度对权向量进行调整。
假设在n时刻滤波器的权向量为α(n),那么对梯度▽J(n)的瞬时估计为
(2)
LMS算法对加权向量的调整方法为

α(n)+μSr(n)e*(n) 。
(3)
式中:μ为迭代步长。在算法初始时刻滤波器系数α(0)可以设置为某些先验值也可以设置为0。
根据Butterweck的理论[10],为保证LMS算法稳定,迭代步长μ的选取应该满足
(4)
式中:Smax为参考信号功率谱的最大值。
2 基于抽取LMS的距离旁瓣抑制方法
当参考信号为白噪声时,LMS算法可以具有很快的收敛速度,在处理时间内可以达到收敛状态,然而,在雷达系统中,通常会以明显大于信号带宽的速率进行采样[9],相邻采样点之间存在很大的相关性。此时,LMS算法的收敛速度会很慢,滤波器系数在处理时间内无法收敛。因此,本文提出一种基于抽取LMS的距离旁瓣抑制方法。
对参考信号进行D倍抽取,使得抽取之后的采样频率近似等于信号带宽,这样参考信号的相邻采样点之间可以认为不相关。抽取之后的参考信号为SD(n)=Sr(nD),以向量形式表示为
SD(n)=[SD(n),SD(n-1),…,SD(n-KD+1)]T。
(5)
式中:KD为抽取后的参考向量长度(对应抽取LMS滤波器的长度)。
同样,对接收信号也进行D倍抽取,根据初始位置的不同,可以得到D个不同的信号,其中第m个信号为
xD,m(n)=x(nD-m)。
(6)
式中:m=0,1,…,D-1。

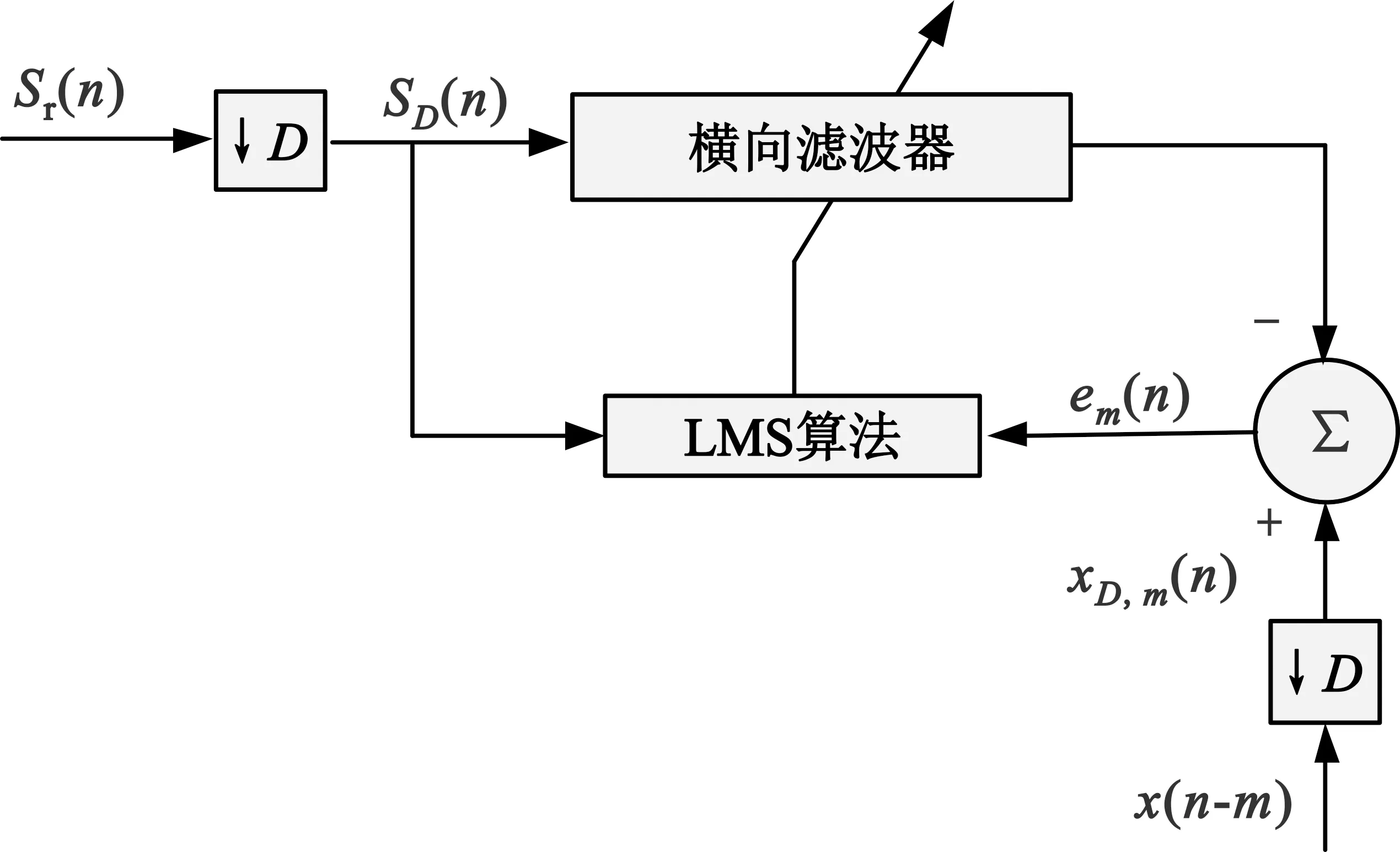
图2 抽取LMS滤波的原理
由于接收信号被抽取成了D个不同的信号,因此可以得到D个与图2结构相同的LMS滤波器。相应地,第m个LMS滤波器的权系数更新方法为
(7)
式中:
最终,得到KDD个距离单元的距离像为
α*(n)=[α1,1(n),α2,1(n),…,αD,1(n),α1,2(n),
α2,2(n),…,αD,KD(n)]H。
(8)


3 性能分析
因为参考信号SD(n)的相关矩阵近似为单位阵,第m个LMS滤波器系数αm(n)的收敛过程与自然模式相同[10]。假设最优滤波器的权系数向量为αm,那么在小步长条件下,vm(n)=αm-αm(n)的第i个元素的均方收敛过程为
(9)

对于单位幅度的噪声调频信号,λi≈E[|SD(n)|2]≈1(实际系统中对接收参考信号进行滤波后信号幅度会有轻微的损失),所以,算法收敛后第i个权系数的方差为
(10)
假设αm中的非零值只有αm,i,那么输出结果的峰值旁瓣比(Peak Side Lobe Ratio,PSLR)为
(11)

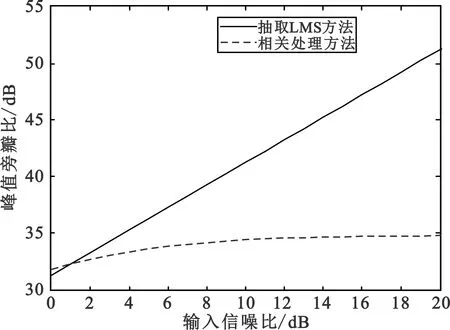
图3 PSLR随输入信噪比的变化(BT=35 dB,μ=1.5×10-3)
4 仿真分析
4.1 距离像的仿真分析
仿真中采用带宽10 MHz、采样率30 MHz的噪声调频信号。不过为了使抽取后的信号满足采样定理,使参考信号和接收信号在进入抽取LMS滤波器之前经过带宽为9.8 MHz的低通滤波器,以滤除边带成分。算法中令抽取倍数D=3,滤波器长度KD=300,步长参数μ=1.5×10-3。
假设两个目标的延迟分别为100和500个距离单元,功率比为30 dB,弱目标信噪比为0 dB。在处理时长为300 μs的情况下,图4给出了相关处理算法、抽取LMS算法以及LMS算法得到的距离像,其中后两种算法的距离像初始值(迭代初值)均为0,LMS算法中滤波器长度为900,步长参数与抽取LMS算法相同。由于此时的相关处理增益仅为35 dB,弱目标的相关峰值仅比强目标的噪声基底大5 dB,所以在图4(a)中,弱目标无法被检测出。而LMS方法的收敛速度很慢,在300 μs的处理时间内远没有达到收敛状态,此时在图4(c)中弱目标也无法被检测。在抽取LMS算法中,距离像的噪声基底明显降低,弱目标可以被检测。但是,由于之前对信号进行了滤波处理(滤波器频域响应近似为矩形),算法输出的距离像旁瓣较高。此时通过对输出距离像进行“频域加窗”处理(通过时域卷积实现)[7],可以使距离旁瓣明显降低。通过汉宁窗处理之后,得到的距离压缩结果如图4(d)所示。

(a)传统相关处理
图5给出了当强目标的距离延迟为100.5个采样点时,抽取LMS算法得到的(加窗处理后的)距离压缩结果,可以看出目标的分数延迟对算法性能并没有太大影响。

图5 分数延迟情况下抽取LMS算法得到的距离压缩结果
4.2 弱目标检测概率的仿真分析
假设强目标和弱目标的幅度分别为a1和a2,延迟分别为τ1和τ2(仍假设τ2=500Δt)。在不同信噪比及强目标延迟情况下,图6 给出了小目标检测概率随两目标回波功率比的变化,其中检测门限按照虚警概率Pfa=1.2×10-4进行设置。由图6也可以看出,当信噪比较大时,抽取LMS算法的性能要明显优于传统相关处理方法;而在0 dB信噪比下,抽取LMS算法与相关处理方法性能基本相同。图6中抽取LMS算法相对于相关处理方法的性能改善大小与图3给出的理论结果基本一致。另外,可以看出目标的分数延迟对算法性能的影响很小。
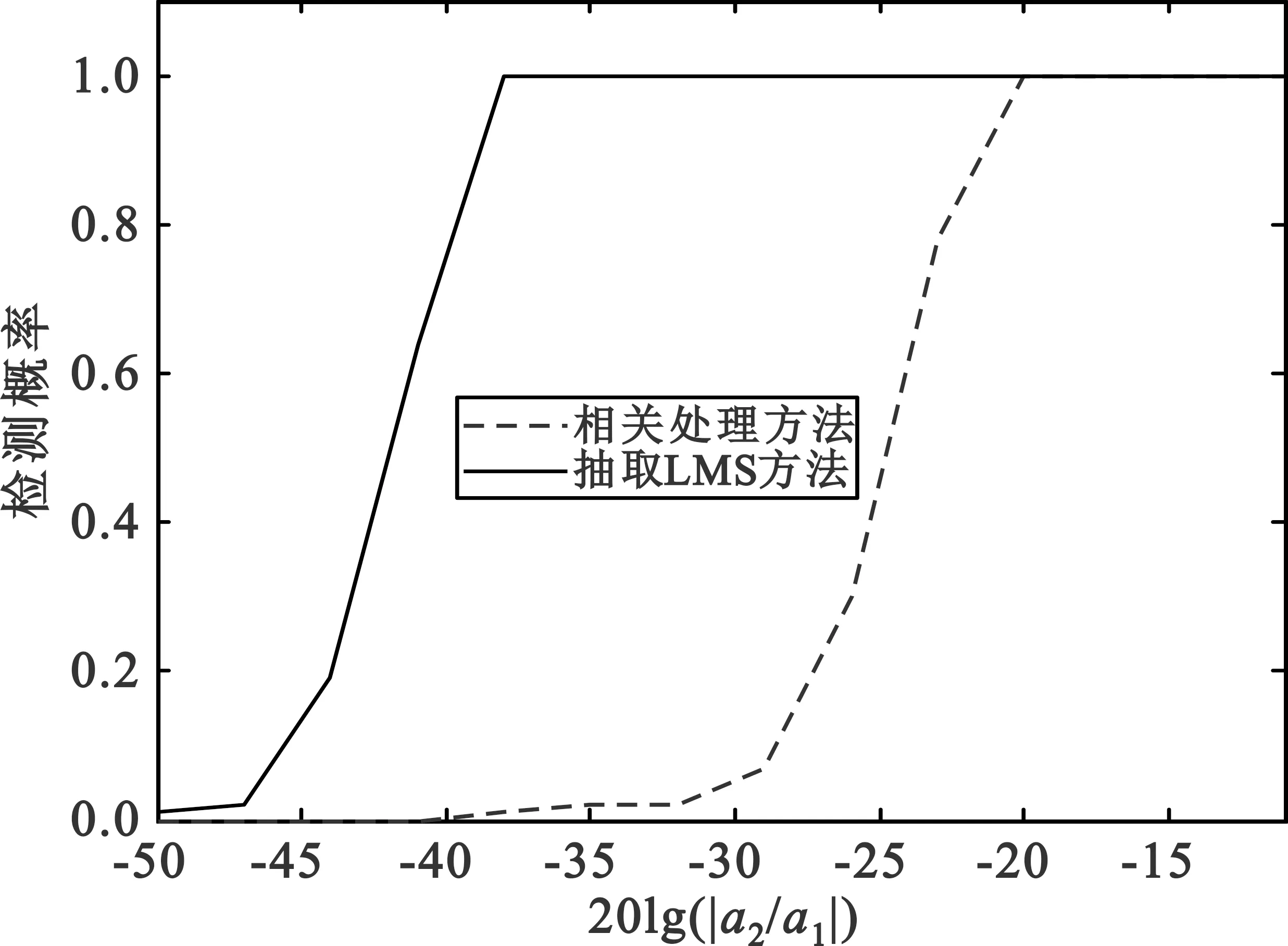
(a)SNR1=20 dB,τ1=100Δt
4.3 峰值旁瓣比随输入信噪比的变化
假设回波中仅存在一个目标,目标位于第50个距离单元,步长μ=3×10-3,其他参数不变,此时通过仿真得到峰值旁瓣比随目标信噪比的变化如图7所示。可以看出,该方法得到的峰值旁瓣比随输入信噪比的提高而增大,并且仿真结果与理论分析一致。

图7 抽取LMS算法PSLR随信噪比的变化(μ=3×10-3)
5 结 论
本文针对噪声雷达回波信号相关处理中存在的距离旁瓣较高的问题,提出了一种基于抽取LMS的距离旁瓣抑制方法,通过多组抽取LMS滤波器计算距离压缩结果。对算法的性能进行了理论分析,得到的PSLR正比于输入信噪比,而不受信号时宽带宽积的限制。通过数字仿真对算法的性能进行了验证,与传统的相关处理方法相比,所提方法可以明显提高距离旁瓣抑制能力,并且PSLR与理论分析一致。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
北京理工大学学报(2021年8期)2021-09-14
电子技术与软件工程(2017年12期)2017-07-05
智能计算机与应用(2016年1期)2016-03-02
湖南大学学报·自然科学版(2014年2期)2014-12-25
电子设计应用(2004年9期)2004-09-17