
基于改进双卡尔曼滤波法的储能电池SOH 估计
2022-09-26 10:09陈志鹏岳元龙
化工自动化及仪表 2022年5期
左 信 陈志鹏 岳元龙
(中国石油大学(北京)信息科学与工程学院自动化系)
储能电池及以它为核心的不间断电源系统(Uninterruptible Power Supply,UPS),对钻井平台作业的可持续性和安全性有着重要作用。 健康状态(State-of-health,SOH)用来评估电池的老化程度, 是影响电池供电性能和安全运行的关键因素,SOH低于80%的电池应该及时更换。目前公认的SOH测量方法为全容量核对性测试方法,但因测试过程放电时间过长、深度过大,无法满足运营需求。 因此,进行储能电池SOH估计方法的研究是非常必要的。
目前对SOH估计的研究方向大致可分为数据驱动[1,2]和模型研究[3]。 数据驱动建模使用统计理论或机器学习技术直接从观测数据中推导出数学模型[4],不足或有偏差的训练数据可能导致估计不准确。 模型研究常采用等效电路模型,即采用简单的电路元件组合的方式来模拟电池的电化学行为。 通常,该方法使用离线数据校准模型参数, 而模型参数易受到荷电状态 (State of Charge,SOC)和SOH的影响,使得模型精度偏低。为实现参数的动态校准,研究人员提出了递归最小二乘法[4]和卡尔曼滤波法(Kalman Filter,KF)[5],并对算法进行了改进[6]。参数辨识后,可以使用已辨识的参数来估计模型状态。 ZHOU D等提出高斯过程回归与扩展卡尔曼滤波(Extended Kalman Filter,EKF)相结合的研究思路[7],并在电动汽车充电数据上取得了较好的SOH估计结果。 付晓光使用双卡尔曼滤波结合自定义工况数据实现了电池的SOC估计[8],算法简单,易于实现。
笔者以戴维南等效电路模型为研究对象,对双卡尔曼滤波(Dual Kalman Filter,DKF)算法进行改进,提出一种多时间尺度双扩展卡尔曼滤波(Multi-time Scale Dual Extended Kalman Filter,MDEKF)算法,并通过应用对比,验证所提改进算法的有效性。
1 储能电池运行工况及戴维南模型
1.1 储能电池运行工况
与电动车辆、电动工具及手机等设备用电池运行工况不同,UPS储能电池作为电力系统的应急电源,大部分时间浮充运行,由市电向负荷侧供电。 在市电异常的情况下,电池放电承担重要设备的应急电力供应任务。 电池SOH与电压等参数不同,不能直接使用工具简单测量得到,而且常规的内阻、温度、电压及电流等参数也不足以表征电池SOH。
DL/T 724—2000《电力系统用电池直流电源装置运行与维护技术规程》[9]要求投入运行的电池组,应定期组织全容量核对性放电试验, 并及时更换SOH低于80%的电池。 笔者将利用放电深度为50%的恒流放电数据, 实现对储能电池SOH的精准估计,用电池最大可用容量来表征SOH。
1.2 戴维南模型
戴维南模型在欧姆内阻的基础上,考虑了电化学极化的影响,可以准确地模拟出电池在恒流条件下的充放电暂态响应曲线。 模型结构相对简单,计算时间短,在电池的实验研究中应用广泛,其结构如图1所示。

图1 戴维南等效电路模型
图1中,Uoc、Uv、Ud分别表示电池的开路电压OCV、端电压和极化电压;R0、Rd、Cd分别表示电池的欧姆内阻、极化内阻和极化电容;iL表示电池的负载电流,图中箭头方向表示电流的正方向。 由基尔霍夫定律和安时积分法得到如下公式:

其中,z为电池SOC;η为电池当前充放电倍率下的效率,在0.1C放电倍率下,取值为1;Uoc随电池z的变化而变化,可视为z的函数;Qn为电池的当前最大可用容量,即SOH的容量表示。
模型离散化。 在单位采样时间内,电池的参数视为固定值,将模型看作时变定常系统进行简化,得到下式:

其中, 下标k为时刻;ΔT为采样时间;τ=RddCdd为时间常数。
不同单体电池的OCV-SOC关系基本相似,通过离线数据进行多项式拟合,得到下式:

2 储能电池SOH估计算法的实现
2.1 DKF算法
在DKF算法中, 用KF算法辨识模型参数,从而实现对戴维南模型中欧姆内阻、极化内阻和极化电容的更新; 用EKF算法估计模型状态, 根据OCV-SOC曲线不断标定开路电压,从而实现对戴维南模型中电压源的更新;然后利用安时积分法逆过程,实现SOH估计。
DKF算法原理如图2所示。
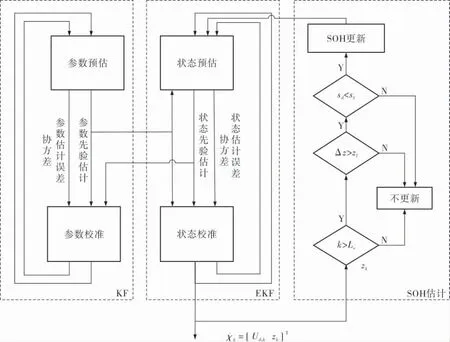
图2 DKF算法原理示意图
2.1.1 基于KF的模型参数辨识
将开路电压Uoc和端电压Uv的差值记为Uc,由式(2)可得:

综合式(2)和式(4),得到下式:

式(5)可以表达为:

将k时刻的模型参数记为θc,k,得到:
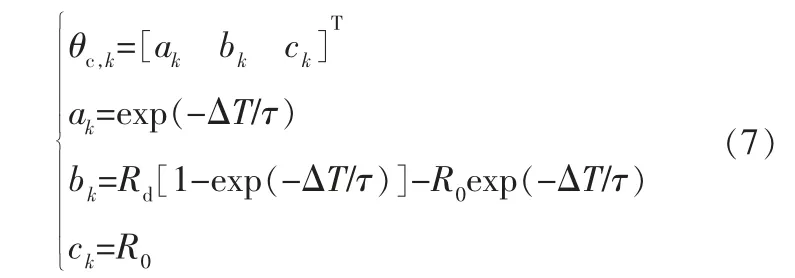
电池的模型参数变化缓慢,在采样时间内可认为参数保持不变。 将式(6)代入KF算法表达式中,容易得到下式:

其中,ωθc、vθc分别为参数噪声和观测噪声,协方差矩阵记为Qθc、Rθc。参数向量θc,k、输出向量Yθc,k、系统矩阵Aθc,k、Cθc,k如下:

2.1.2 基于EKF的模型状态估计
将离散化后的电池模型代入EKF算法表达式中,容易得到下式:

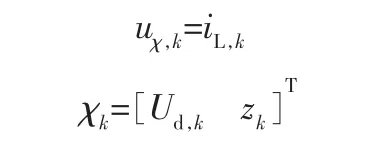
其中,ωχ和vχ为系统的状态和观测噪声,协方差矩阵记为Qχ、Rχ,状态向量χk的估计值记为χ^k。 输入向量uχ,k、状态向量χk、输出向量Yk、系统矩阵Aχ,k-1、Cχ,k以及状态方程函数fχ(,uχ,k-1)、观测方程函数hχ(,uχ,k)如下:

2.1.3 基于状态估计的SOH估计
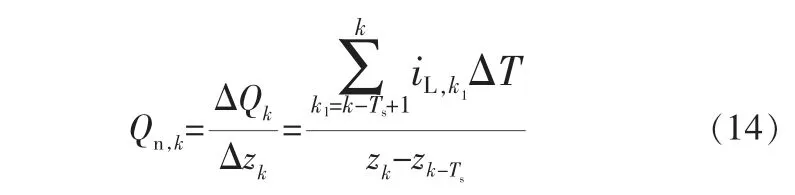
电池SOH对OCV-SOC曲线的影响较小, 根据安时积分法逆过程可得到在k时刻算法估计的电池最大可用容量Qn,k:
其中,Ts为SOH更新的时间间隔;Δzk为SOC的变化量;ΔQk为电池容量的变化量。 当Δzk较小时,SOC的估计误差将严重影响SOH的估计精度,因此需要预设约束条件来保障算法的精度和稳定性:
a. 设置时间长度阈值Ls。 应预留充足的算法准备时间,使得SOC估计值能够精准跟踪真实值。
b. 设置Δzk的阈值zf。 当SOC的变化量Δzk大于阈值zf时,才允许更新SOH。 因为Δzk过小的话,容易造成SOH估计波动较大。
c. 设置SOH变化率限制。 应设置SOH变化率阈值sf,防止SOH大范围波动导致估计结果发散。记SOH的变化率为sd,则有:
2.2 双卡尔曼滤波改进算法
2.2.1 双扩展卡尔曼滤波算法
为增强DKF算法的鲁棒性, 笔者对其结构进行改进,调整参数滤波器的新息矩阵与状态滤波器保持一致,建立起参数辨识和状态估计的耦合结构。 参数记为θk=[R0RdCd],代入EKF算法表达式中,容易得到下式:

其中,θk为系统参数向量,θk的估计值记为;Aθ,k、Cθ,k为系统矩阵;ωθ、vθ分别为参数和观测方程噪声。 各参数向量、输出向量、系统矩阵以及系统参数方程函数、观测方程函数如下:

其中,Uoc,k的估计值记为,Ud,k的估计值记为。 需要指出的是,由于参数滤波器观测方程的新息矩阵与状态滤波器是一致的,hθ(,uχ,k,θk)的表达式与状态滤波器的观测方程hχ(χk,uχ,k)是一致的。
将基于EKF的状态估计方法与基于EKF的参数辨识方法结合在一起,得到一种双扩展卡尔曼滤波(Dual Extended Kalman Filter,DEKF)算法。在DEKF算法中,为了统一表达,使用H(χk,uχ,k,θk)表示包含了状态和参数变量的观测方程,F(χk,uχ,k,θk)表示包含了状态和参数变量的状态方程。
式(17)中,Cθ,k的计算式如下:
式(19)中,通常认为卡尔曼增益矩阵Lχ,k-1与θ是相互独立的或者说二者之间的关联性对算法的表现贡献很小[10],得到下式:

综合式(22),初始值设置为0,通过递推公式得出Cθ,k。
2.2.2 MDEKF算法
结合模型状态和参数的时变特点,引入多时间尺度对状态和参数分别在宏观和微观尺度上进行估计,得到一种MDEKF算法。
初始化:

宏观尺度上,计算参数的时间更新,得到k时刻参数的先验估计及其估计误差协方差矩阵

宏观尺度的时刻记为k, 微观尺度的时刻记为l, 取值范围为[1,Lz],Lz为多时间尺度转换限值;ln为当前时刻,在数值上等于(k-1)×Lz+l。在微观尺度上,计算状态的时间更新,得到ln时刻状态的先验估计及其估计误差协方差矩阵:

微观尺度上,计算状态的测量更新,得到ln时刻的新息矩阵ek-1,l、卡尔曼增益Lχ,k-1,l和状态的后验估计及其误差协方差矩阵Pχ,k-1,l:
其中,I为单位矩阵。
循环计算,l取值Lz时,完成尺度转换:

宏观尺度上,计算参数的测量更新,得到k时刻的新息矩阵ek,0、 卡尔曼增益Lθ,k和状态的后验估计及其误差协方差矩阵:
时间循环更新, 基于SOC的估计值实现SOH估计。
按下式赋值,推移至下一时刻继续执行上述算法:

若当前时刻满足预设的约束条件, 则计算SOH的更新。
MDEKF算法的结构如图3所示, 图中Lz为多时间尺度转换限值,ln为当前时刻。

图3 MDEKF算法的原理
3 应用算例
笔者选用的电池额定容量为200 Ah, 当前SOH为150 Ah。 在放电深度为50%的恒流放电数据上, 对比DKF、DEKF和MDEKF算法的应用表现,验证参数辨识和状态估计的耦合结构以及多时间尺度方法对算法鲁棒性和精度的影响。
3.1 算法初始化
在状态滤波器的初始值设置中, 如果Qχ设置得过小,算法将过于依赖模型,相当于安时积分法,很难收敛,鲁棒性弱;如果Rχ设置得过小,算法将过于依赖测量值,相当于开路电压法,精度很低。 状态滤波器中的Qχ、Rχ、Pχ,0设置如下:
在参数滤波器的初始值设置中,如果Qθc设置得过小,算法将不会更新电池模型参数,导致参数滤波失败;如果Rθc设置得过小,算法将大范围更新电池参数,容易导致算法发散。 参数滤波器中的Qθc、Rθc、Pθc,0设置如下:

采样周期ΔT取1 s; 时间长度阈值Ls取2 000 s;Δzk的阈值zf取0. 5%;SOH的变化率阈值sf取0.03。
MDEKF算法多时间尺度转换限值Lz取60 s;DEKF、MDEKF算法其他参数设置与DKF算法保持一致。
3.2 DKF算法应用
DKF算法在放电数据上的应用表现如图4、5所示。 图4a、b分别为欧姆内阻初始值扰动前、后DKF算法的SOC估计和SOC估计误差对比曲线。图5a、b分别为欧姆内阻初始值扰动前、 后DKF算法的SOH估计和SOH估计误差对比曲线。

图4 扰动前、后DKF算法在SOC上的跟踪效果
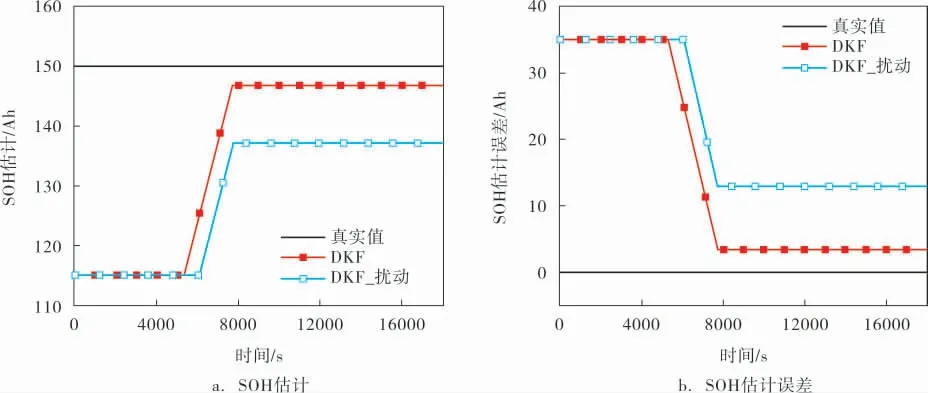
图5 扰动前、后DKF算法在SOH上的跟踪效果
综合图4、5可以发现: 选择合适的初始值,DKF算法有着很好的估计精度。 SOC估计误差最大值控制在0.05以内; 稳定后的SOH估计误差控制在5 Ah以内;但DKF算法的鲁棒性较弱,当模型参数初始值发生扰动后,SOC估计精度降低明显,稳定后的SOH估计误差超过了10 Ah。
3.3 DEKF算法应用
DEKF算法在放电数据上的应用表现如图6、7所示。 图6a、b分别为欧姆内阻初始值扰动前、后DEKF算法的SOC估计和SOC估计误差对比曲线。图7a、b分别为欧姆内阻初始值扰动前、 后DEKF算法的SOH估计和SOH估计误差对比曲线。

图6 扰动前、后DEKF算法在SOC上的跟踪效果

图7 扰动前、后DEKF算法在SOH上的跟踪效果
综合图6、7可以发现:DEKF算法的鲁棒性明显强于DKF算法, 证实了改进算法的有效性。 扰动前、 后,SOC和SOH的估计精度基本没有变化,SOC估计误差最大值控制在0.05以内; 稳定后的SOH估计误差控制在5 Ah以内。
3.4 MDEKF与DKF、DEKF算法应用对比
MDEKF算法在放电数据上的应用表现如图8、9所示。 图8a、b分别为3种算法下的SOC估计和SOC估计误差对比曲线。图9a、b分别为3种算法下的SOH估计和SOH估计误差对比曲线。
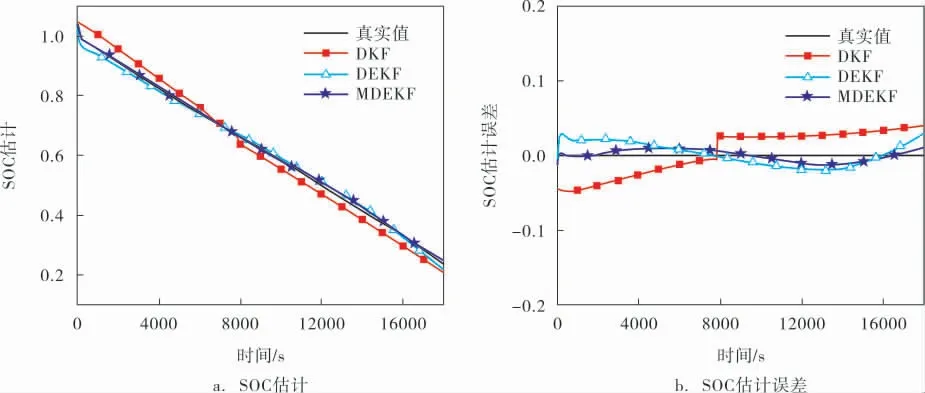
图8 3种算法在SOC上的跟踪效果对比
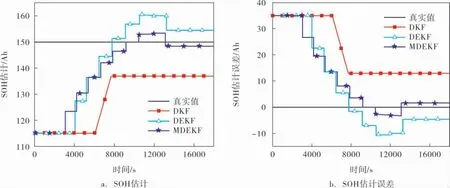
图9 3种算法在SOH上的跟踪效果对比
为了更直观地展示DKF、DEKF和MDEKF算法的估计表现,对应用结果进行统计分析,结果见表1。 其中,平均绝对百分比误差(Mean Absolute Percentage Error,MAPE) 表征模型的估计精度,MAPE越大,代表样本的估计误差越大,估计精度越差。

表1 3种滤波算法的实验结果统计分析
结合应用案例可知:多时间尺度的引入有效地提升了算法的估计精度,证实了所提方法的有效性。 MDEKF算法获得最佳的估计精度, 其中SOC估计误差最大值为0.039,MAPE为1.30%;稳定后的SOH估计误差为1.59 Ah, 误差百分比为1.06%。
4 结束语
对双卡尔曼滤波算法进行改进,并结合戴维南等效电路模型,提出基于多时间尺度双扩展卡尔曼滤波的SOH估计算法。 在储能电池放电深度为50%的恒流放电数据上的应用结果表明: 参数辨识和状态估计的耦合结构以及多时间尺度方法的应用,能够有效地提升算法的估计精度和鲁棒性,SOC估计的MAPE小于1.5%, 稳定后SOH估计误差小于2 Ah。笔者所提出的SOH估计方法,大幅缩短了电池放电的时长和深度,并取得较高的估计精度, 为储能电池的SOH监测提供了很好的应用模型和算法。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年7期)2021-08-13
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
电子制作(2019年23期)2019-02-23
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年9期)2017-12-18
华人时刊(2016年16期)2016-04-05
汽车电器(2014年5期)2014-02-28
