
电气传动控制器局部干扰信号自动识别研究
2022-09-26 02:37赵晓宇殷海双
自动化与仪表 2022年9期
赵晓宇,殷海双
(东北石油大学 电气信息工程学院,大庆 163319)
随着信息时代的到来,电子设备被广泛应用于各个领域,实现了不同行业的沟通与交流,信息的相互交换实际上就是电子信号之间的数据传递。 当电动机识别到有利的信号,会立即识别出信号所携带的信息,然后转换成机械能,控制器就会使信号的传输幅度保持在相同的频率。 而在实际生活中,信号正常传输时,会受到各种因素干扰,导致信号中断不能按时传输。 基于此,许多学者都研究了局部干扰信号识别方法,文献[1]研究了基于SVM 分类受电弓振动干扰信号识别方法,该方法主要计算接触网冲击指数确定偏差位置,然后计算该偏差的加速度衰减系数,并通过衰减系数组成识别特征向量,完成干扰信号识别;文献[2]研究了雷达干扰信号识别决策树的自动化设计方法,该方法首先建立基于干扰信号的参数特征集,在决策树中引入模糊均值聚类方法,最后采用基于信息增益的算法建立模糊聚类决策树,实现局部干扰信号的识别。 但是,当前的干扰信号自动识别方法仍然存在一定不足,为此需要优化当前的干扰信号识别方法。 此次研究的研究思路是预先对干扰的各种信号实地采集与分析研究,自动将干扰信号过滤出来,识别信号的主要特征,通过主要特征的识别就会非常容易地找出干扰信号变化的规律。 基于这个思想,设计了一种电气传动控制器局部干扰信号自动识别方法,同时此次研究的方法更加着重于加入适量地减少参数,以增强方法的代表性与实用性,使信号的识别更加准确与灵敏。
1 干扰信号模型建立
干扰信号的种类繁多且复杂, 不能一概而论,根据识别数量的多少可分为单一信号干扰、多组信号干扰、弧形信号干扰与噪声信号干扰等,以单一干扰信号为例,该信号不能对所有的信息传输通道造成干扰,只对特定的控制系统发出干扰[3],中断正常信号的传输,优点是不受任何因素影响,检测快速,功率较大,在干扰时的表达式为

式中:t 代表周期;Pj代表该干扰信号发射的功率;f 代表传输中的信号通道;χ 代表干扰位置。 干扰信号完成一个周期的发射后,就会立即产生巨大功率,频率马上达到阈值,此时要立刻收集信号样本[4],周期可设置为10-4s。
与单信号干扰不同, 多信号干扰更加复杂,主要是由不同的频道以及长短不一的音波组成,它不仅是针对单一的信号通道造成干扰,还会将信号随机分类,分别介入每个时域内,并均匀分布[5],同时产生大功率干扰,其作用的效率远远大于单一干扰信号,在相同周期内用公式表示为

式中:n 代表信号频道的数量;i 代表随机信号;fi代表干扰信号所在的通道。 其中所涉及到的所有参数都是决定干扰信号强弱的重要因素,包括信号变化的频率与幅度,位置与相对应的正常信号。
弧形信号干扰也可以理解为频率不同的信号同时干扰,也是应用最多的信号干扰,由于信号发射的路线随机,不一定是朝向同一个方向,会被控制随着时域与周期的变化而变化,呈正态分布[6],但在特定的时域内可能会出现单信号干扰的情况,表现出弧形信号的干扰特点,周期相同的情况下表达式为

式中:R 代表信号活动的幅度;k 代表线性系数;T 代表时域。 其中幅度与时域的变化是控制弧形信号干扰的主要因素,最后将获得的信号波绘制成曲线[7],找到主要波动规律。
噪声信号干扰与其他信号干扰不同,当发射出干扰信号时就会立即中断信息通道,完全阻塞正常信号的传输,产生较大赫兹,噪声就会逐渐增大,干扰的范围也会大于上述几种,那么最后形成的表达式为

式中:N 代表噪声;j 代表信号带;Rj代表信号带变化的幅度;K 代表噪声矩阵;δ 代表噪声系数, 且服从正态分布。 噪声的干扰原理主要是调节信号带的宽度,使系数与距离在同一频道,保证控制器局部对信号正常识别。
当利用电动控制器削减传输通道中的干扰信号时,虽然适量地减少了其他频率的信号产生[8],但识别到的干扰信号会受到影响出现分辨率降低以及电波不稳定的情况, 为了使识别到的信号清晰、周期一定,设定一个标准频率,求出最大值,通过SPWVD 算法令信号处于相同时域,定义为

式中:c 代表阈值;UZ代表分辨率。
基于上述过程建立干扰信号模型,为后续信号识别提供基础。
2 干扰信号预处理及特征提取
对干扰信号的预处理是建立在干扰信号正常运行的基础上的,是将其拦截之后找到传输的规律与时域,完成分类以及计算的过程。 在处理之前采集到局部干扰信号与控制器主要特征,针对特征的相似性来判断属于何种类别,去除重复的干扰信号[9],之后找到各自的位置,忽略电流的影响归一化处理。 为了减少计算的复杂性,随时改变信号转化的类型与行进方向,对属性不同的信号及时进行傅里叶变换,尽量避免人工操作,那么经过预处理后的表达式为

k 作为一个系数控制着整个频道的线性变化,在预处理过程中设置k=1, 就可以根据系数的变化来自动识别出干扰信号的类别,将干扰信号与噪声区分,分别输入进两个系统,实施检测,获取其主要特征。 基于传输通道的特异性,使干扰信号波动的幅度一致[11],处理后得到多个功率值,表达式为

式中:Pi(n)代表平均功率;P(M)代表最大功率;P1代表初始功率。 从其中提取出干扰信号的相似特征,随着振幅的改变,公式就变为

式中:(n-i)代表减少的信号干扰;L 代表信号波长;P1(M)代表改进后的功率,功率的变化是从P1逐渐变化到最大值。 系统中的窗口值会由于波长的增大而增大,不受其它因素的影响,那振幅系数的表达式为

上述计算后,对干扰信号预处理,并提取到了一些信号特征。
3 电气传动控制器局部干扰信号自动识别实现
电气传动控制器干扰信号的识别是外国学者提出来的,经过研究发现马尔科夫过程与识别研究极为相似,以其为例建立一个识别模型[12],模仿信号的活动轨迹,预测出每个时刻信号的状态,识别流程如图1 所示。
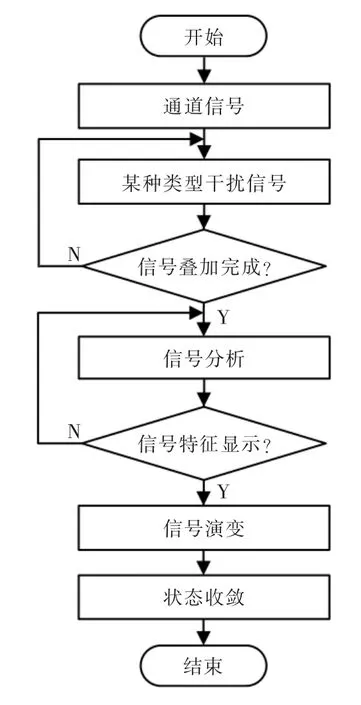
图1 干扰信号识别流程Fig.1 Interference signal identification flow chart
针对这一特点找出干扰信号的状态规律,过滤出与模型无关的其他状态[13],假设信号的控制序列为{Xi,i=0,1,2,3,…},那么满足下列条件:
式中:x1代表干扰信号的初始状态;X(x1)代表初始状态序列;xe代表能量转换;X(xe)代表能量转换的信号序列;xn代表终止状态;X(xn+1)代表终止状态序列;ln代表窗口的长度;P 代表功率。
公式的波动规律能够体现出马尔科夫的特征[14],一个参数的增大就会引起另一个参数的减小,具有随机性但却足够稳定,随着过程的逐渐实现就会将结果汇报给系统,然后采用决策树方法,进行分类,原理如图2 所示。
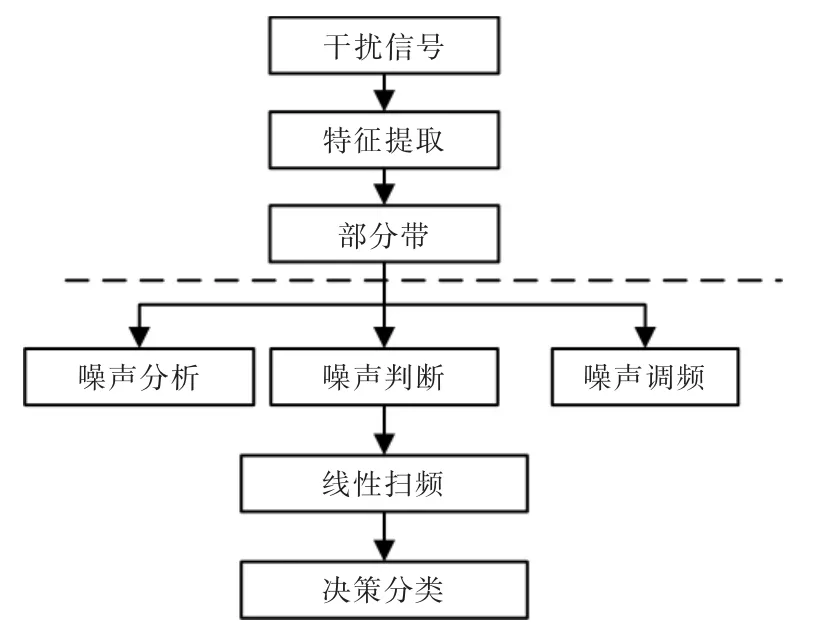
图2 决策树方法分类过程Fig.2 Classification process of decision tree method
经过上述处理后,得到的决策集合表示为{S,P,A,R},其中,S 代表轨迹集合,P 代表功率集合,A 代表模拟集合,R 代表幅度集合。
从公式的演变可以知道,干扰信号的每一个状态变化都与之前的活动轨迹相关,随着状态的线性变化回报出的数值也慢慢清晰,而信号动作幅度的大小决定着回报的长短,信号的特征会根据状态的回报显现出来,而马尔科夫过程并不是一成不变的,大致分为持续状态变化与间隔状态变化,前者来说干扰信号会持续维持某种状态,而后者的信号干扰会一直保持在相同状态[15],不会继续演变,公式为

式中:G 代表终止状态;ω 代表权重,范围在[0,1]之间;(Si,Si+1)分别代表前后信号运动的轨迹。 当信号的状态属于间隔状态时,是不会随着轨迹结束的,此时ω=1,那么回报的公式为

当干扰信号处于持续状态时,权重就为ω=0,此时信号是具有终止动作的,要使信号一直保持不重复的幅度变化,才能获得最佳决策。 从其他方向出发使0<ω<1,就可以制造出回报,完成状态的收敛。当决策逐渐消失,同时得到的收益最大,将不会有任何状态的影响,以此完成电气传动控制器局部干扰信号的自动识别。
4 实验对比
为验证电气传动控制器局部干扰信号自动识别方法的有效性,进行实验,并将基于SVM 分类识别方法、雷达干扰信号识别决策树的识别方法与所研究方法对比。 实验中信号的采集与分析采用分析仪实现,分析仪性能指标如表1 所示。

表1 分析仪性能指标Tab.1 Performance indicators of the analyzer
按照相应的接线方式安装测试装置,保证电源是正常工作的,然后模拟干扰,主要干扰情况如表2 所示。

表2 干扰信号仿真参数以及变化范围Tab.2 Simulation parameters and variation range of interference signal
分别施加4 次不同噪声, 对比在多种噪声下3种方法对于干扰信号识别的准确性。 单音干扰下信号识别结果如图3 所示,多音干扰下信号识别结果如图4 所示, 线性扫频干扰下信号识别结果如图5所示,噪声调频干扰下信号识别结果如图6 所示。
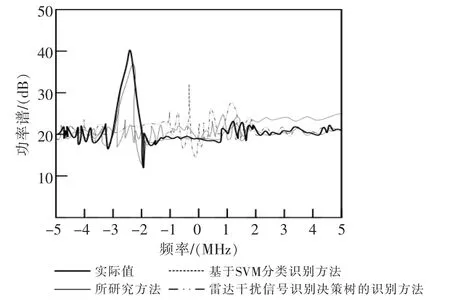
图3 单音干扰下信号识别结果Fig.3 Signal recognition results under monotone interference

图4 多音干扰下信号识别结果Fig.4 Signal recognition results under multi-tone interference
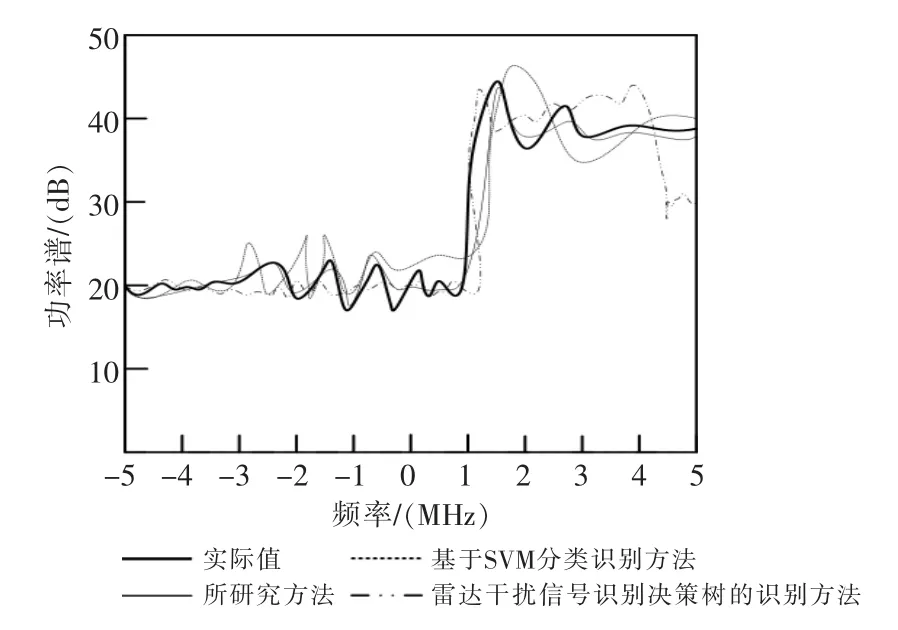
图5 线性扫频干扰下信号识别结果Fig.5 Signal recognition results under linear frequency sweep interference
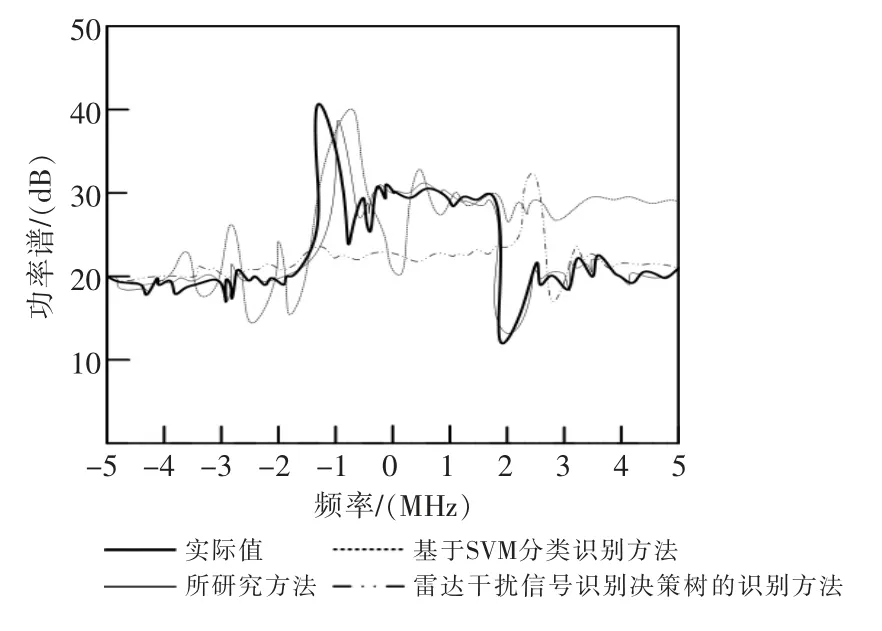
图6 噪声调频干扰下信号识别结果Fig.6 Signal recognition results under noise FM interference
基于上述结果能够看出,所研究的方法在单音干扰下、多音干扰下、线性扫频干扰下一级噪声调频干扰下,所研究的局部干扰信号识别方法与实际的信号变化情况基本保持一致,具有较高的识别准确性。 而另外两种方法在信号识别上得到的功率谱与实际情况有一定差距,没有所提出的信号识别方法识别准确性高。
5 结语
基于上述过程完成电气传动控制器局部干扰信号的自动识别,此次研究创新之处如下:①针对信号的幅度、 频率与状态进行分类以及特征提取,并去除了噪声;②将得到的回报尽数应用在传输通道中,根据特征的不同选用不同的方法,不但增加了局部控制,并得到了最大收益;③实验结果表明,所研究的方法在多种干扰下,都获得了较高的识别和准确性。 由于时间有限,所提出的方法还有不足之处,在后续研究中需要进一步优化。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
计算技术与自动化(2022年2期)2022-07-04
舰船科学技术(2022年10期)2022-06-17
计算技术与自动化(2022年1期)2022-04-15
海军航空大学学报(2021年1期)2021-09-01
水上消防(2019年3期)2019-08-20
舰船电子工程(2019年6期)2019-07-08
劳动保护(2019年3期)2019-05-16
北方工业大学学报(2019年5期)2019-03-30
航天电子对抗(2017年4期)2017-09-16
