
储罐壁面爬壁机器人吸附结构设计与优化
2022-09-26 02:37王佳烽俞竹青
自动化与仪表 2022年9期
王佳烽,俞竹青,吕 雪
(常州大学 机械与轨道交通学院,常州 213164)
石化企业作为国家的基础性产业,它为农业、交通、机械、能源等工农业和人民日常生活提供配套服务,在国民经济中发挥重要作用[1]。 储罐是石化企业必备的重要装备,用于存放气态、液态等化工原料与产品。 储罐中储存的介质通常具有腐蚀性,为了确保石化设备的安全运行,必须定期进行喷漆等其他维护工作,通常每6~8年进行一次整体检修。目前国内传统的储罐喷涂方法主要通过人工搭建脚手架的方式,首先,在罐壁表面附近设置脚手架进行喷漆。 脚手架的搭建时间取决于储罐的大小。搭建脚手架后,作业人员用喷枪进行喷漆。 在喷涂过程中,每个罐的主体需要喷3~5 次。 喷涂对象包括储罐主体的内外壁面以及所有附加设备。 这种传统的人工作业方式存在以下主要缺点:
(1)作业周期长,工作效率低。 从脚手架的搭建到喷涂作业的完成,脚手架的拆卸,工作量大,劳动强度高。 同时,佩戴防坠落装置会给作业人员带来不便,降低工作效率。
(2)损害人体健康,作业环境危险。 雾化喷雾会使作业人员长时间停留在有毒的气雾空间里,对他们的身体造成巨大损害。 即便使用防护装置,也很难完全隔绝与涂料接触[2]。 喷漆作业和搭建、拆除脚手架均属于高空危险作业,具有相当危险性。
总之,传统的高成本低效率、危害人身健康的人工喷漆方式已无法满足现阶段的工艺要求,亟需被自动化程度高的机器人作业所取代[3-4]。
1 爬壁机器人结构方案设计
1.1 整体方案布局
本文设计的爬壁机器人具备3 个基本功能,即吸附、运动和喷漆检测[5-6]。 如图1 所示,爬壁机器人采用永磁吸附,履带式移动,即使运行过程中机器人出现故障或者断电时也不会发生脱离罐壁的情况。
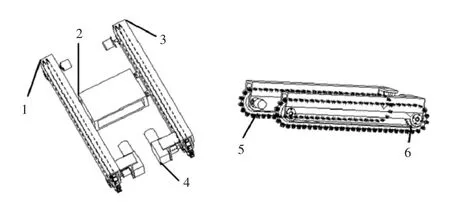
图1 爬壁机器人结构示意图Fig.1 Structure diagram of wall-climbing robot
本文设计的爬壁机器人由爬行驱动机构、永磁吸附机构、喷漆检测机构等组成,机构组成框图如图2 所示。 爬壁机器人通过装有特制永磁铁的履带紧紧吸附在罐壁壁面。 通过蜗轮蜗杆减速电机带动链轮,链轮带动链条运转,从而使机器人运动,进而驱动车体向上爬行[7]。

图2 喷漆爬壁机器人机构组成框图Fig.2 Structure block diagram of painting climbing robot
1.2 自适应吸附行走结构模型建立
由于石化储罐罐壁是一种曲率半径较大的自由曲面,使爬壁机器人在转弯行走过程中无法实时贴合罐壁保证足够的吸附力,使爬壁机器人发生倾覆危险。 根据上述情况设计一种自适应能力强的吸附行走机构,该吸附行走机构具有两个方向上的旋转自由度,如图3 所示,分别为沿X 轴方向如图3(a)与沿Y 轴方向如图3(b)所示。
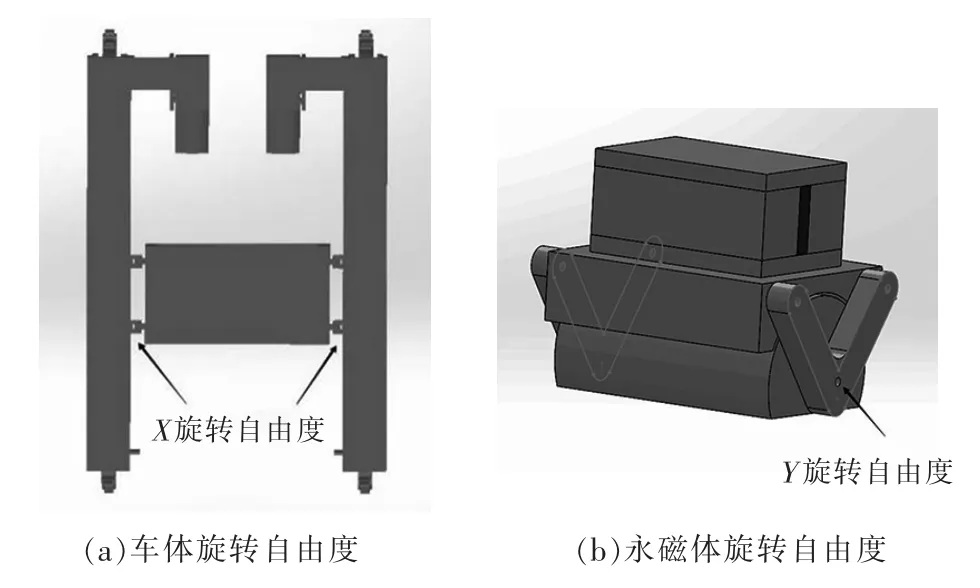
图3 两自由度旋转吸附机构模型Fig.3 Two degrees of freedom rotating adsorption mechanism model
爬壁机器人通过旋转左右车体与中间平台的铰链产生沿X 轴方向的旋转如图4 所示。 当爬壁机器人进行转弯运动时,需要具备在一定范围内实现吸附半径变化的能力,考虑到机器人转弯时,存在前端吸附结构翘起的情况[8],因此设计了特殊的吸附结构, 使链节与永磁体之间具有旋转自由度,当爬壁机器人转弯运动时,可以通过永磁体旋转自由度,减小吸附结构与罐壁的距离,确保爬壁机器人与罐壁之间具有足够的吸附力。
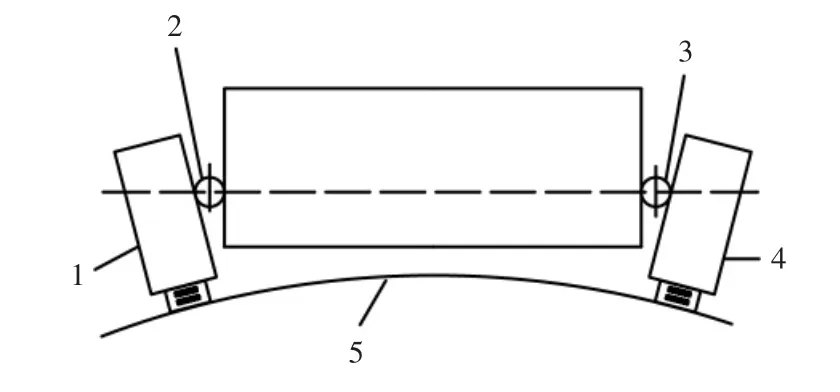
图4 爬壁机器人曲面适应模型Fig.4 Surface adaptation model of wall-climbing robot
2 爬壁机器人静态受力分析
本文设计的爬壁机器人具有结构对称性,故本节进行受力分析时只对一半车体进行分析。 爬壁机器人在壁面上处于静止状态时,受重力G,永磁吸附装置与壁面间的磁吸附力Fi, 壁面对爬壁机器人的支持力Ni以及爬壁机器人和壁面间的摩擦力Ff,爬壁机器人纵向翻转极限点A,爬壁机器人重力偏移轴线距离H,机器人质心C。 如图5 所示,存在4 种失效方式:沿壁面滑动、沿壁面滚动、纵向倾覆和横向倾覆。
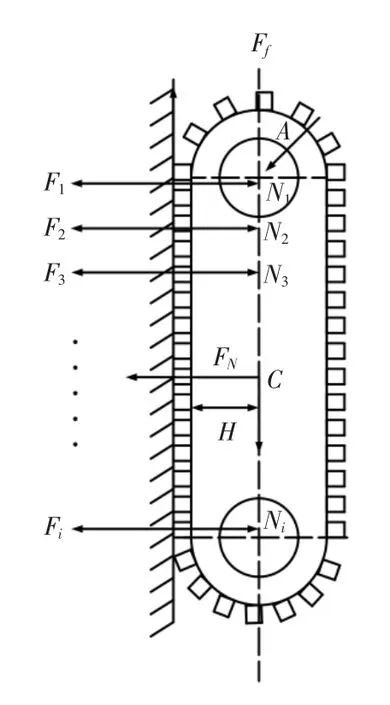
图5 爬壁机器人纵向受力分析图Fig.5 Longitudinal force analysis chart of wall climbing robot
2.1 沿壁面滑动时的受力分析
爬壁机器人有沿着壁面下滑的倾向。 为了使机器人静止在壁面上,机器人与壁面间的摩擦应该大于沿壁面外力之和,满足以下条件:
式中:n 为履带与壁面同时吸附的永磁体数目;μ 为静摩擦系数。 假设各永磁体吸附力均相同,则可令:

由公式(4)可以得出:

得到结果:

式中:N1为沿壁面下滑状态下单个永磁体吸附力。
2.2 沿壁面滚动时的受力分析
机器人的向下滚动倾向是由机器人主体上的重力产生的下滚扭矩引起的,是机体内部相对作用的结果。 链条上的永磁吸附单元与壁面接触的总面积不变,机器人在重力力矩的作用下发生向下滚动。将沿着壁面向下滚动,履带上端与壁面接触的第1块永磁体产生的力矩克服重力矩GH 的作用, 同时电机和减速器提供制动力矩M1和阻力矩M2, 阻止爬壁机器人沿壁面下滚。
式中:L 为最上端与壁面接触的单个永磁吸附单元的长度。 本文设计的爬壁机器人采用的是蜗轮蜗杆减速电机,该电机具有自锁性,可实现反向自锁,提供足够大的阻力矩,防止爬壁机器人产生相对下滚。
2.3 纵向倾覆时的受力分析
爬壁机器人不发生纵向倾覆的条件为:∑MA≥0,通过计算可得:
式中:N2为纵向倾覆状态下单个永磁体吸附力。
2.4 横向倾覆时的受力分析
爬壁机器人本体不发生横向倾覆的条件为:∑MB≥0。 横向受力分析如图6 所示。
图6 爬壁机器人横向受力分析图Fig.6 Lateral force analysis chart of wall climbing robot
图中:N1i,N2i为单条履带永磁体与壁面作用力;D 为爬壁机器人两履带吸附中心距离;B 为爬壁机器人横向翻转极限点。

式中:N3为横向倾覆状态下单个永磁体吸附力。
2.5 静止吸附状态失稳极值计算
根据以上爬壁机器人常见的失稳状态分析,考虑安全系数,爬壁机器人所需要的最小吸附力为:

式中:K 为安全系数。
3 永磁吸附结构设计与仿真分析
3.1 磁吸附力计算
永磁吸附装置的优化,是以永磁轮与壁面间的吸附力为优化目标进行设计计算[9]。由Maxwell 张力法可知,在求解静态磁场问题时,需要满足的条件是磁体为各项同性材料[10],由此作用于磁介质上的作用力,等于磁场张量在包围该磁体的闭合曲面上的曲面积分,可以进行求解计算。

式中:T 为张力张量;s 为永磁体边界外的代求解闭合面;n 为单位矢量,其方向与积分面积ds 的法线方向一致;B 为通过闭合面s 的磁感应强度大小;μ 为空气相对磁导率。
3.2 永磁体的结构尺寸设计
初定两块永磁体中间的隔磁材料宽度T1=2 mm,轭铁厚度T2=2 mm,永磁体宽度T3=5 mm 以及氯丁胶厚度T4=1 mm。 爬壁机器人自身重量及负载不超过20 kg。 通过上节对爬壁机器人的静态受力分析可得单个永磁吸附装置的最小吸附力不得小于15.3 N。 所以对永磁吸附装置进行3D 建模,运用Ansoft Maxwell 对壁面所受吸附力进行求解,通过改变永磁体高度,确定永磁吸附装置在满足最小吸附力的情况时的高度。 仿真分析云图如图7 所示。 永磁体高度取5 mm~15 mm,壁面所受吸附力随永磁体高度变化如图8 所示。
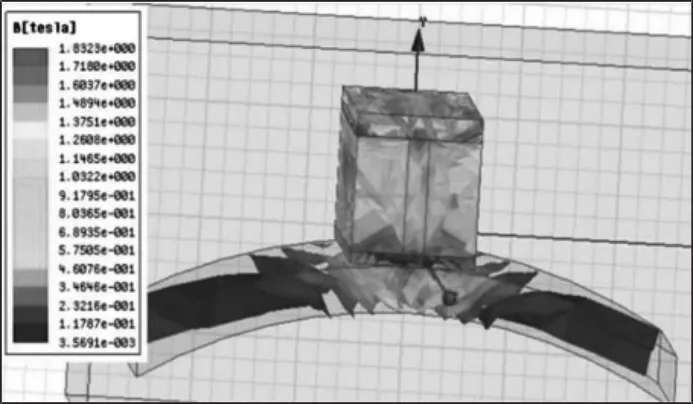
图7 永磁吸附结构磁感应分析云图Fig.7 Magnetic induction analysis cloud chart of permanent magnet adsorption structure
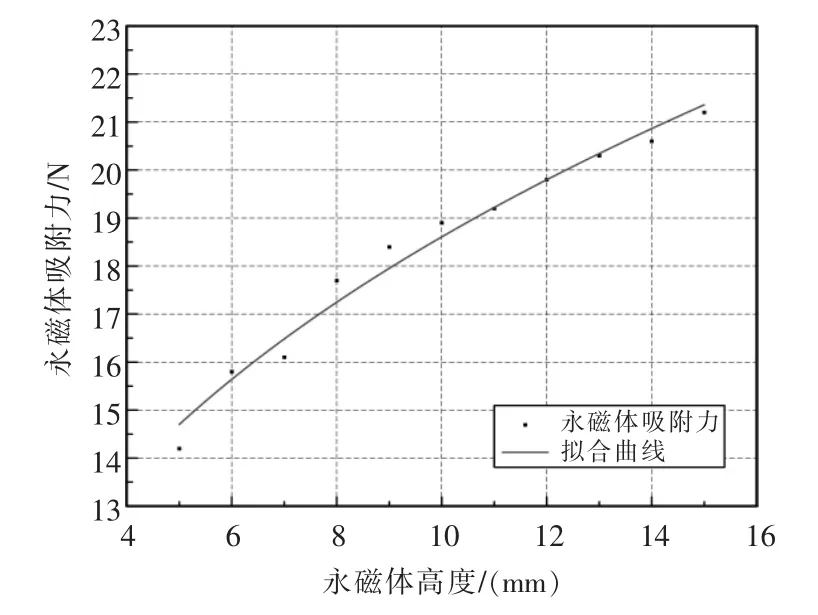
图8 永磁吸附力随永磁体高度变化曲线Fig.8 Curve of permanent magnet adsorption force versus permanent magnet height
永磁体的吸附力随着其高度的增加而增加,当永磁体高度小于8 mm 时,壁面所受吸附力增长较快,当永磁体高度大于8 mm 时,壁面所受吸附力增速减缓,这是因为工作间隙内的磁通量有逐渐饱和的倾向。根据爬壁机器人的静力学分析,单个永磁体吸附装置的最小吸附力不小于15.3 N,安全系数取20%,所以单块永磁吸附装置的吸附力应为15.3×120%=18.36 N,所以从图中可以看出永磁体的最小高度应取9 mm。
3.3 永磁吸附装置的结构尺寸优化
根据爬壁机器人的工况条件对磁吸附单元的结构尺寸预先取值,长L=20 mm,宽D=5 mm,高H=10 mm。 本节利用控制变量法研究不同结构尺寸对磁吸附单元产生的吸附力的影响,并从中选取合适的尺,获得最佳磁质比的磁吸附单元。
待优化的永磁吸附单元结构原理图如图9 所示,其中需要优化的尺寸有:隔磁元件宽度T1;轭铁厚度T2;永磁铁宽度T3;氯丁胶保护层厚度T4。 通过Maxwell 软件进行永磁吸附装置仿真。
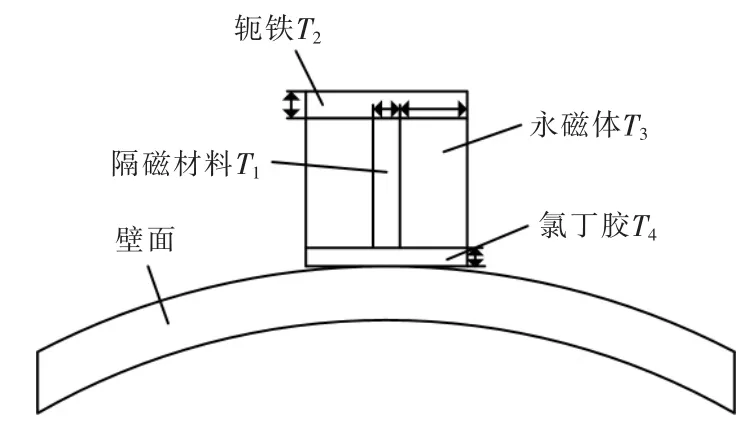
图9 待优化的磁吸附单元结构原理图Fig.9 Structure schematic diagram of magnetic adsorption unit to be optimized
(1)铝隔磁元件宽度T1的尺寸优化
本节将以铝隔磁元件宽度T1为变量,保持其他结构尺寸一定,研究分析其宽度变化对磁吸附力的影响。 选取T1范围在1 mm~8 mm,并且间隔为1。
通过Maxwell 2D 仿真分析,如图10 所示,可以看出当T1=1 mm 时产生的最大磁感应强度为2.32 T。
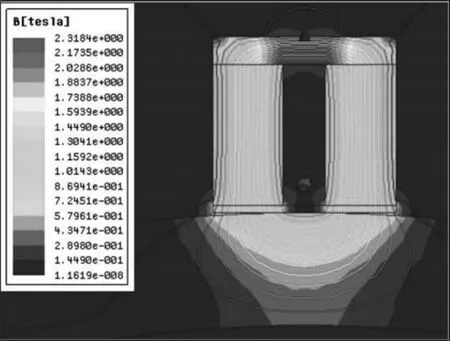
图10 T1=1 mm 时磁感应及磁力线分布图Fig.10 Distribution of magnetic induction and magnetic line at T1=1 mm
绘图查看永磁体吸附力随T1的变化曲线,如图11 所示。
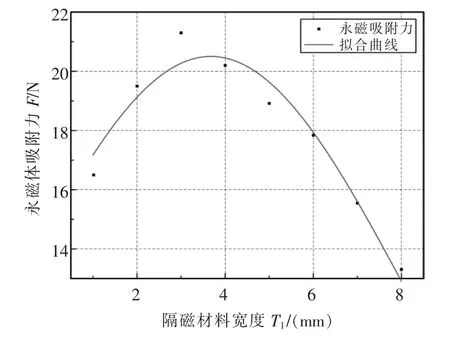
图11 铝隔磁元件宽度T1 对磁吸附力的影响Fig.11 Influence of width T1 of aluminum magnetic insulation element on magnetic adsorption force
分析图11 可知,磁吸附力随着T1取值的增大呈现先升后降的趋势,且在T1为3 mm 时达到最大值,其值为21.4 N。 究其原因,不难发现当铝隔磁元件宽度不够大时,永磁体形成的磁力线回路并不都经过罐壁内部,随着T1取值的增大,当磁力线回路全都通过罐壁内部时,此时产生的磁吸附力为最大值。而当T1继续增大,则使磁吸附单元与壁面间的间隙变大,导致磁吸附力下降。 最终选择铝隔磁元件宽度T1大小为3 mm,此时能够产生的吸附力最大。
(2)轭铁厚度T2的尺寸优化
本节将以轭铁厚度T2为变量,保持其他结构尺寸一定。选取T2 范围在1 mm~8 mm,并且间隔为1。
如图12 所示,可以看出当T2从1 mm~3 mm 时,经轭铁向非工作区的漏磁减少,同时经轭铁引到工作间隙内的磁通量增加。
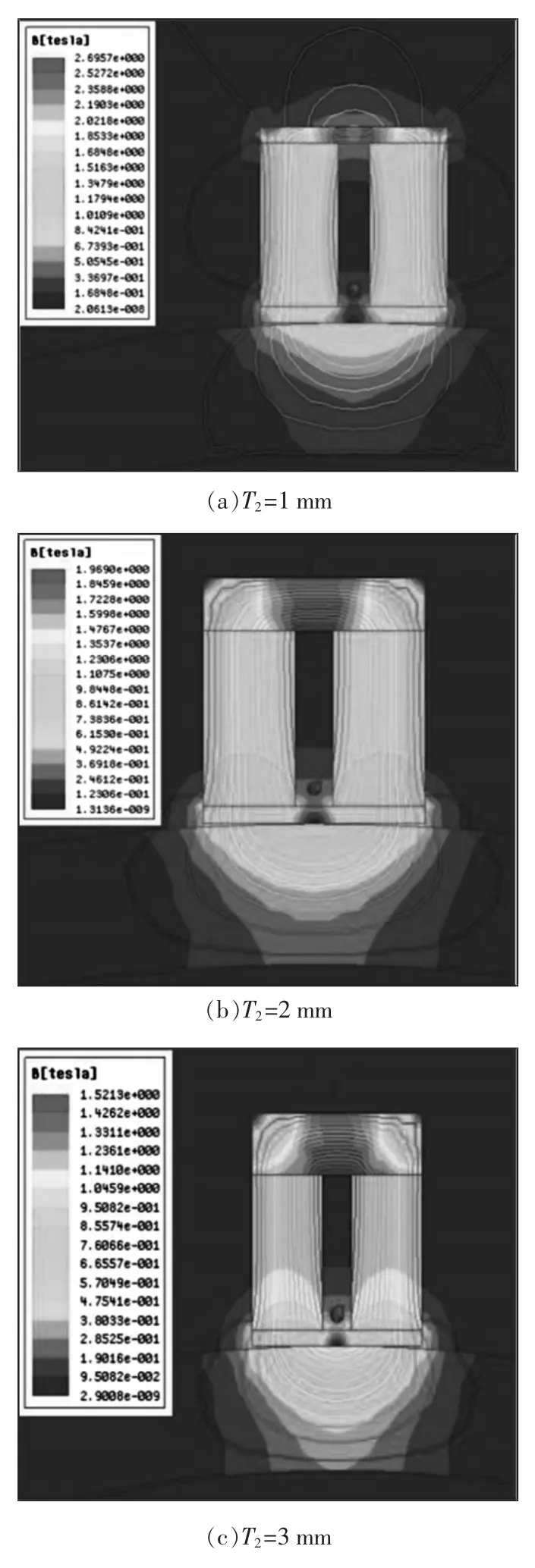
图12 T2=1,2,3 mm 时磁感应及磁力线分布图Fig.12 Distribution of magnetic induction and magnetic line at T2=1,2,3 mm
绘图查看永磁体吸附力随T2的变化曲线,如图13 所示。
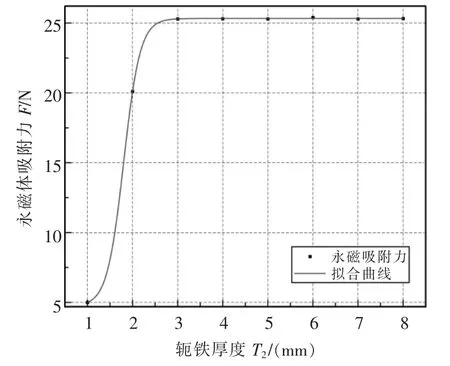
图13 轭铁厚度T2 对磁吸附力的影响Fig.13 Effect of yoke thickness T2 on magnetic adsorption
如图13 所示,当轭铁厚度T2从1 mm~3 mm 时,壁面所受吸附力陡然增大,壁面所受吸附力在轭铁厚度3 mm 时达到最大值, 随后吸附力变化趋于平缓。 产生上述现象的原因是由于当轭铁厚度不够大时,磁吸附单元与罐壁间形成的回路不足以容纳所有磁力线,导致漏磁现象。 由图12 可以看出,随着轭铁厚度的增加,磁通泄露逐渐减少,工作间隙内的磁通量逐渐增加,永磁吸附力增加,随后磁通量基本不变。 故本文选取轭铁的厚度T2=3 mm 为宜。
(3)单个永磁体宽度T3的尺寸优化
本节将以永磁铁宽度T3为变量,保持其他结构尺寸一定,选取T3的范围在1 mm~8 mm,并且间隔为1。
绘图查看永磁体吸附力随T3的变化曲线,如图14 所示。

图14 磁铁宽度T3 对永磁吸附力的影响Fig.14 Effect of magnet width T3 on permanent magnet adsorption force
根据图14 所示,磁吸附力与永磁体宽度T3的变化成正比。 而经前文研究可知,爬壁机器人在稳定状态下的永磁吸附力为47.4 N,而T3=6 mm 时,磁吸附力的取值为48.2 N,符合安全可靠条件,因此本文选择T3=6 mm。
(4)氯丁胶保护层厚度T4的尺寸优化
本节将以氯丁胶保护层厚度T4为变量,选取T4范围在1 mm~4 mm,间隔为0.5。
绘图查看永磁吸附力随氯丁胶保护层厚度T4的变化曲线,如图15 所示。

图15 氯丁胶保护层厚度T4 对永磁吸附力的影响Fig.15 Effect of protective layer thickness T4 of chloroprene on permanent magnetic adsorption
从图15 可以看出,永磁吸附力随着T4的增加呈现递减的趋势。 为保证永磁吸附力的大小,应该选取较薄的氯丁胶保护层,但是太薄的保护层容易受到伤害从而失去保护效果。 综合考虑分析后,本文选择T4=1 mm 的氯丁胶保护层为宜。
3.4 永磁吸附装置的结构尺寸确定
对永磁吸附单元进行磁路研究并设计出高效的磁路,再以此为基础,采用控制变量法分别对隔磁元件宽度T1,轭铁厚度T2,永磁铁宽度T3和氯丁胶厚度T4进行优化,得到满足其稳定吸附条件的最优参数。其中T1=3 mm,T2=3 mm,T3=6 mm,T4=1 mm。
4 结语
针对爬壁机器人在运动过程中因吸附力不足而导致的倾覆问题,通过对爬壁机器人的结构设计分析,借助Solidworks,Maxwell 等软件,设计了一款具有曲面适应性的永磁吸附爬壁机器人结构:该结构具备两个方位上的旋转自由度,结构灵活度高,在运行过程中通过旋转自由度使吸附结构自主贴合罐壁壁面,确保爬壁机器人吸附的稳定可靠; 对爬壁机器人在静止状态下进行受力分析,考虑不同情况下的失稳边界条件,根据给定参数计算得到吸附单元需要提供的有效吸附力,并在确定吸附单元的结构之后,进行磁力仿真和结构优化,并获得了最佳的结构尺寸。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
冶金设备(2022年1期)2022-06-10
计算机仿真(2022年1期)2022-03-01
防爆电机(2021年5期)2021-11-04
模具工业(2021年8期)2021-08-30
河北农机(2021年3期)2021-03-31
微电机(2020年9期)2020-12-04
北京航空航天大学学报(2017年5期)2017-11-23
