位置未知条件下惯性/星敏组合系统海上牵引启动方法
2022-09-26 06:57郭正东赵汪洋孙大开
中国惯性技术学报 2022年3期
郭正东,赵汪洋,刘 伟,李 晓,孙大开
(1. 海军潜艇学院,青岛 266199;2. 天津航海仪器研究所,天津 300131;3. 北京控制工程研究所,北京 100190)
惯性导航系统初始对准是系统进入正常工作的前提。一般而言,初始对准的实现需要外部辅助设备提供当地地理纬度信息。在某些特殊的应用场合或卫星拒止条件下,需要进行惯性导航系统未知纬度下初始对准。文献[1]指出静基座下地理纬度未知条件捷联惯导系统初始对准问题,研究了陀螺、加速度计信息估计地球转动矢量和重力矢量间的夹角,实现静基座下对纬度的自估计。文献[2]研究晃动基座上纬度自估计方法,根据重力矢量在惯性系上的投影特性,完成时间序列中重力矢量夹角与纬度之间的几何关系,实现了晃动基座下纬度自估计。文献[3]在未知纬度自对准算法中引入小波阈值消噪和多项式优化,提高惯导系统抗扰动自对准精度。
在无纬度情况,惯导自对准需要用到两个重要信息源:一是地球重力矢量,一是地球转速Ω。根据重力矢量法,将无纬度支持的对准问题转换为对地轴矢量在参考坐标系下投影解算问题,提出解决思路[4]。当动基座时,利用基于惯性系的粗对准方法,隔离了角晃动干扰对对准的影响,采用设计优化滤波器的方式来消除或减少动态条件带来的干扰,起到了较好的误差抑制效果[5]。
在未知纬度下通过反映重力信息比力、惯性系重力参考矢量来提取惯性系下的参考矢量方式,只有在高纬度下,这种方式对准精度较高[6];但当高纬环境地球旋转矢量与重力矢量随纬度增高趋于同向,惯导定向依赖的地球自转水平分量逐渐减弱,从惯性对准原理出发,高纬度下初始对准能力是下降的。因此在这种情况下,惯性系初始对准的方位失准角误差影响因素较为复杂[7]。
在导航级惯性仪表参数下,传统重力矢量纬度自估计精度在0.1 °左右,但存在抗干扰差、尤其大晃动或方位转动情况时,精度超差问题[1]。
本文研究的惯性/星敏组合系统牵引启动方法可实现位置未知条件下的经度、纬度自估计,解决了传统重力矢量纬度自估计抗干扰差的问题。在经纬度估计完成的条件下,惯性基准重新装订经纬度初值,通过惯性/星敏组合系统中的旋转控制机构,正反旋转调制陀螺漂移,实现海上锚泊条件下惯性基准高精度自对准。
1 惯性/星敏组合系统滤波模型
本文研究考虑基于惯性基准误差全面校准模式下的惯性/星敏组合牵引启动方法。
惯性/星敏组合导航系统采用惯性基准系统的误差方程作为组合系统的状态方程,以惯性基准解算的导航信息与星光定向仪提供的位置信息构建相应的量测方程,利用最优滤波方法实时估计和补偿惯性器件误差。星敏感器数据的输出频率比惯性基准数据更新的频率低,因此在对惯性/星敏组合系统进行严格的同步,再将惯性基准解算结果与星敏感器数据进行数据融合,同时对惯性导航系统进行估计,补偿惯性导航系统误差,达到提高惯性基准系统精度的目的[8]。其组合模式原理图如图1所示。
1)建立惯性状态方程
采用Kalman滤波方法,建立惯性/星敏组合精对准模型:
系统状态变量为:

其中,φx、φy、φz分别为纵摇、横摇、方位失准角;δvx、δvy、δvz分别为东向、北向、天向速度误差;δφ、δλ、δH 分别为纬度、经度、高度误差;εx、εy、εz分别为X、Y、Z轴方向的陀螺常值漂移;∇x、∇y、∇z分别为X、Y、Z轴方向的加速度计零位误差。
系统的状态方程采用单轴旋转光学惯性基准捷联系统的误差方程作为系统状态方程[9]。
2)惯性/星敏组合导航系统量测信息
星敏感器观测的星光为载体系下的星光矢量信息,输出的姿态信息是载体系相对于惯性系下的姿态,无法直接用于对惯性导航系统当地地理坐标系下的导航信息的误差进行修正[10]。船载平台中星敏感器通过对恒星的观测,没有外部参考信息情况下,确定星敏感器本体坐标系相对于地球惯性坐标系的转换矩阵。在星敏感器安装误差已知条件下,通过外部提供时间信息和水平基准信息可进行坐标系之间的转换计算,输出船载平台地理系下的姿态和位置信息。因此标定惯性/星敏之间的安装误差是组合系统得到准确量测信息的关键步骤。

其中,R、P、H分别为惯性基准的横摇、纵摇和航向。
以星敏感器星矢量建立地理坐标系下的姿态阵如式(3)所示:



根据式(5)星敏感器在导航系下经纬度表示为:
根据星敏感器的定位特点结合船舶在锚泊下的运动限制条件,以星敏感器的位置与惯性基准位置信息之差作为滤波器量测信息:

2 组合系统牵引启动方法
2.1 启动设计
惯性/星敏组合导航系统海上对准方法首先以重力矢量在惯性系随时间变化的几何关系确定大致纬度实现粗对准,同时考虑组合系统对准时,准静态条件辅助星敏感器实现惯性坐标系和载体坐标系的转换求解,实现组合系统的精对准。
粗对准过程中,在惯性基准所处位置的纬度圈中心, pi(pj)为惯性基准初始对准过程中ti(tj)时刻在惯性系位置,其重力加速度垂线为gi(gj)如图2所示。

图2 纬度确定几何关系示意图Fig.2 Geometric diagram for latitude determination
则有如下表达式[1,12]:

其中,η为 pi、pj与地轴间夹角,θ为 pi、pj与地心夹角。根据重力矢量在惯性系变化关系可得初始纬度0L为[13]:
采用惯性/星敏组合系统牵引启动的方式,对重力矢量法得到的粗略纬度,代入组合系统启动惯性基准,当惯性基准水平失准角滤波器稳定时,摆镜式星光敏感器控制组合系统旋转机构开启寻星模式。
组合系统中星敏感器输出定位、定向信息需要惯性基准提供水平基准信息,不可避免由于惯性基准的水平姿态误差导致了星敏感器输出的定位误差。在对准过程中影响水平基准的主要还是加速度计零位误差,由于位置未知,惯性基准和星敏感器的牵引启动过程中位置相对固定条件,初始纬度误差造成了惯性水平基准偏差导致了星敏感器光轴探测矢量出现偏差,即拍摄的星质点不能完全在采集星图的中心位置[14],将影响星敏感器定位精度;但相对于粗略纬度,星敏将反馈更为准确的定位信息到惯性基准,惯性基准系统再次对准时,水平基准精度的提升将提高星敏感器的定位输出,迭代数次后,星敏感器的定位输出将趋于稳定,即定位输出精度接近于星敏感器探测精度。牵引启动的设计流程如图3所示。

图3 启动设计流程Fig.3 Initiate design process
2.2 误差分析
在惯性/星敏组合导航系统精对准过程中,以船舶锚泊为条件,充分利用星敏感器的惯性定姿功能,以惯性水平基准—星敏感器定位输出迭代修正过程,提高未知纬度下水平基准精度从而实现组合导航系统位置信息的快速定位估计,进而完成惯性基准初始对准。
星敏感器惯性系与地理系转换关系可表示如式(10)。

其信息转换流程如图4所示。

图4 锚泊条件下CNS信息转换Fig.4 CNS information transformation based on mooring
在组合系统精对准过程中,惯性基准为星敏感器提供载体横摇角、纵摇角、初始航向,舰船授时系统为星敏感器提供基准时间。若星敏感器水平基准存在误差,分析其对纬度、经度影响。
若存在横摇角误差 γΔ ,根据球面三角形公式有:
化简得:
即有经纬度误差:

其中: Δλ 为经度误差,Δφ 为纬度误差。
若存在纵摇角误差Δθ ,则有经度误差Δλ=0,纬度误差Δφ = -Δθ 。综上所述,若纵横摇存在误差,则引起经纬度误差:

则根据球面公式同样可得到:

在纬度24 °条件下,若10 ″水平姿态误差,观星定位将产生0.18海里的位置误差。
3 试验验证
为了验证本文提出的基于锚泊条件旋转式惯性/星敏组合系统未知位置下海上对准方法应用效果。在某试验场进行了验证试验。惯性/星敏组合系统结构设计如图5所示,其中惯性基准采用90型激光陀螺,其陀螺漂移稳定性0.003°/h,漂移重复性0.005°/h;加速度计采用石英加速度计,标度误差优于20 ppm,零偏重复性优于50 μg,零偏的月稳定性优于30 μg,惯性基准解算频率为400 Hz。其上方共基座安装的全天时摆镜式星敏,其视场为2 °,采用白昼探测灵敏度补偿及大气折射修正技术,白昼观星等级优于4等星,光轴测量精度优于5 ″,数据更新率大于1 Hz。惯性基准的旋转机构受星敏控制,可以保证星敏360 °全方位扫描和追踪恒星,摆镜在一定小角度范围内活动,扩大星空扫描区域,增强星敏白昼的探测能力。

图5 旋转式惯性/星敏组合系统Fig.5 Rotary INS/CNS combination system
试验采用锚泊的方式进行验证,试验时的初始纬度、经度为24.596 °、102.845 °。在无准确位置下启动惯性基准,惯性/星敏组合系统自主对准。星敏在水平基准的逐次修正条件下,其经纬度误差如图6所示。惯性基准经纬度误差在迭代牵引对准过程中收敛曲线如图7所示,惯性基准姿态的收敛曲线如图8所示。
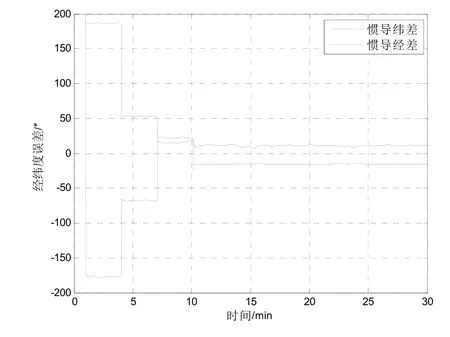
图7 惯性基准位置误差Fig.7 Position Error of INS

图8 惯性基准姿态误差Fig.8 Attitude error of INS
从图6-8可以看出,在牵引迭代对准过程中,由于惯性基准的水平姿态误差主要由加速度计零位决定,虽然粗对准中纬度估计不准,但惯性/星敏组合系统的水平仍能满足星敏感器寻星的水平基准要求。同时在对准过程中,提供给星敏的水平基准是姿态滤波输出值,因此在对准过程中水平姿态误差不会发散振荡。从图6中可以看到在对准过程中,星敏前期输出的定位信息误差相对较大,且有效数据的输出频率较低,但随着数次迭代对准后,惯性/星敏组合系统输出的定位误差的波动和输出频率均趋于稳定。

图6 星敏位置误差Fig.6 Position error of star sensor
对比图7和8图可以看出,为避免失准角重置后引起的超调,在惯性基准滤波处理中采用了滤波器局部重置的方式,在重置位置误差时完成姿态误差补偿。
在位置未知条件下,惯性/星敏组合系统牵引启动下经纬度自估计误差优于0.3′(3σ),观星定位与测量误差相当。完成估计经纬度初值后,惯性/星敏组合系统可以按照传统对准流程进入对准程序,也可以借助星敏定向功能进行组合系统快速对准。对比两种方法,从对准效率而言,采用星敏定向功能辅助惯性基准对准效率更优。但是考虑到星敏在海上使用的限制条件,星敏传感器的航向精度输出波动较大,因此本文在得到自估计的经纬度采用了传统对准流程,根据对准阶段船舶锚泊条件,设计平滑滤波环节减少位置误差波动引入的对准误差,增强海上对准的可靠性。
4 结 论
针对旋转式惯性/星敏组合系统特点,设计了基于锚泊的位置未知条件下海上牵引启动方法,建立了惯性/星敏滤波迭代模型,设计海上对准惯性/星敏相互牵引启动流程、对准精度自主判别方式,实现惯性/星敏海上经度、纬度自估计。相比于惯性基准以重力矢量进行的未知纬度估计,旋转式惯性/星敏组合系统能够在海上晃动、方位旋转情况下完成海上位置估计,克服惯性基准重力矢量在低纬度下自估计误差较大的问题。在没有环境因素干扰的情况下,惯性/星敏组合系统经纬度估计精度与星敏感器的测量精度相当。但船载星敏感器在海上复杂条件下,受到盐雾、云层、蒙积差修正精度等因素影响,引起的干扰误差也是一个重要误差源,在极端情况下其干扰误差远大于星敏感器探测误差。
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
科技资讯(2018年10期)2018-10-26
当代陕西(2018年12期)2018-08-04
齐鲁周刊(2017年29期)2017-08-08
中学政史地·教学指导版(2016年12期)2017-05-16
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01