
多构型移动机器人创新实验平台设计
2022-09-23 10:35陈晓红孙园喜毛亚芳
实验室研究与探索 2022年6期
陈晓红, 柏 龙, 孙园喜, 毛亚芳, 王 浩
(重庆大学 a.机械与运载工程学院;b.重庆大学-辛辛那提大学联合学院,重庆 400044)
0 引 言
移动机器人作为执行装置或物料的载运平台[1],在机器人技术的学习[2-4]、验证及科研活动中被广泛应用[5-6]。针对不同的环境或地形,移动机器人具有轮式(常见的有橡胶轮、麦克纳姆轮、全向轮)、履带等多种构型方式[7-8]。目前市面上已有较多的商业化的移动机器人平台可供选购。然而作为教学、竞赛及科研活动来说,目前商业化的移动机器人平台多为单一的构型与功能,无法满足对移动平台构型、功能等方面的多样化需求。而且现有的移动机器人平台,控制与通讯系统也相对封闭,不利于二次开发。
本文提出了一种多构型移动机器人创新实验平台,设计了模块化可拼装机械套件,可根据需求,快速方便地搭建5种不同的移动机器人构型,通过串口向机器人发送指令完成运动的控制,以完成不同任务的需求。
1 多构型移动机器人平台设计
多构型移动机器人平台由模块化可拆装机械套件、驱动系统以及控制系统组成。
1.1 模块化可拆装机械套件设计
不同的应用场景或主题对移动机器人的机动能力有不同的需求,如平整地面采用轮式机器人效率高、稳定性好,常用的是可以全向移动的麦克纳姆轮机器人[9](Mecanum Wheel,四轮布局)和全向轮机器人[10](Omni Wheel,三轮布局);而台阶、野外等需要越障的地面则履带机器人[11]更为适用。为了实现一套实验平台可满足不同构型机器人搭建的需求,本文设计的移动机器人的模块化可拆装机械套件,可快速、方便地搭建5种不同的移动机器人构型,包括3种不同尺寸规格的麦克纳姆轮机器人,全向轮机器人以及履带式机器人,如图1所示。

图1 可搭建的移动机器人构型
为满足机械套件的可快速拆装性,本文设计了多种尺寸类型的接头、铝方管、铝板以及板件。采用模块化设计,并具备统一的连接形式和拆装方法,如图2所示。此外,管件和板件设计为多孔结构,既可减轻机器人重量,提升自重负载比,又便于定位、安装与搭载功能负载。

图2 机械套件部分模块化零部件
1.2 驱动系统设计
驱动系统性能的好坏会直接影响机器人的机动能力与负载能力。对于电动机驱动的机器人,电动机及其驱动器决定机器人的运动精度和负载能力,电源的性能则影响机器人的续航能力。为保障机器人平台的模块化可快速拆装性,本文设计了统一的电动机安装模块与驱动方式,如图3所示。

图3 电动机模块化安装底座与安装方式
本文选择了大疆RoboMaster M3508直流无刷减速高性能伺服电动机作为实验平台的驱动电动机,其搭配C620电调支持50~500 Hz的PWM信号控制和CAN总线指令控制,还可实时读取电机转子位置等状态信息。为适配电动机的工作电压,选用6S(22.2 V),5.2 Ah,35C的航模电池作为电源,并通过22.2 V降5 V的降压模块为控制器及传感器供电,同时在电源的输出端串联1个电量显示模块以实时显示电池电量。
1.3 控制系统设计
为简化布线,使系统集成度更高,设计了如图4所示的集成电路,集成了电池、电量显示模块、急停开关、蜂鸣器、MPU9250姿态传感器、电动机接口、电调CAN线接口以及运动控制器等。其中22.2 V(6S)电池经急停开关、电量显示模块为电动机供电,并通过降压模块为底层控制器供电;无源蜂鸣器连接在控制器的PWM信号输出引脚,进行实时故障报警;运动控制器通过串口与MPU9250姿态传感器相互连接,实时获取机器人姿态信息以实现对机器人运动角度的控制;C620电调的CAN线接口并联到底层控制器的CAN信号输出引脚;为搭建底层控制器与其他上层控制器的通信接口,留出RX、TX、GND串口输出引脚和5 V供电接口。
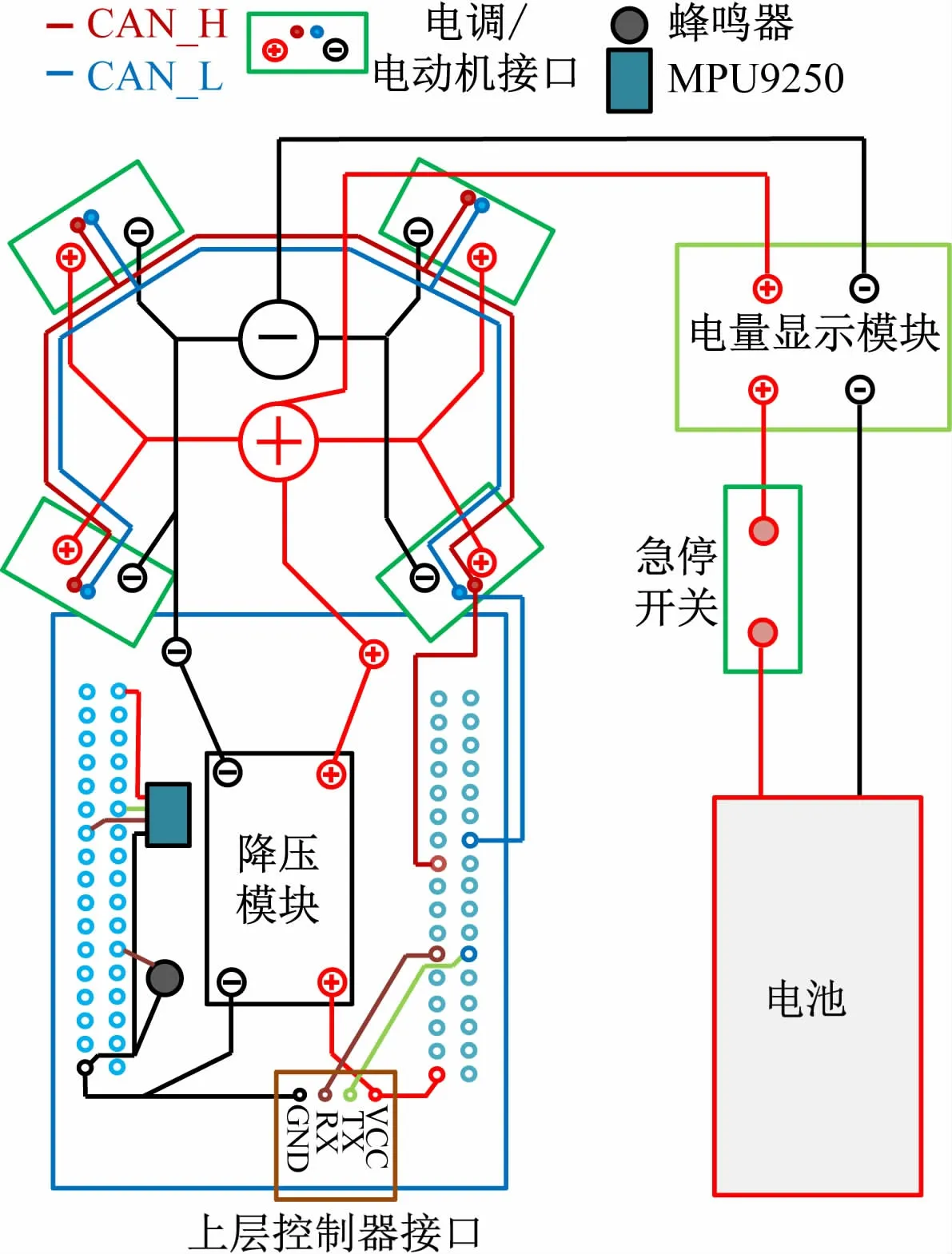
图4 控制器集成电路设计图
考虑到机器人平台对主控芯片内存资源、处理性能、中断处理能力及功耗成本等的要求,本文选用了STM32F4系列单片机[12]作为机器人运动控制器。
2 实验平台运动控制算法开发
本文开发的实验平台可搭建出3种类型的移动机器人,针对不同构型的机器人,构建底层驱动系统和上层控制系统,集成不同构型移动机器人所对应的运动控制算法,根据通信协议通过串口向机器人发送指令完成运动的控制,从而需要设计相应的运动控制算法以及与上层(用户)控制器的通信协议,同时开发扩展接口。
2.1 控制系统架构
STM32F4控制器可通过串口读取MPU9250获取的角度信息,通过电动机的CAN通信协议读取电动机转角信息等,也可向C620电调发送控制指令对电动机进行控制。Arduino/STM32/树莓派等上层(用户)控制器可以通过串口以及开发的通信协议来调用底层运动控制函数实现机器人的运动控制,通过UART、IIC、模拟/数字引脚等接口连接不同类型的传感器以完成特定的任务,控制系统框如图5所示。
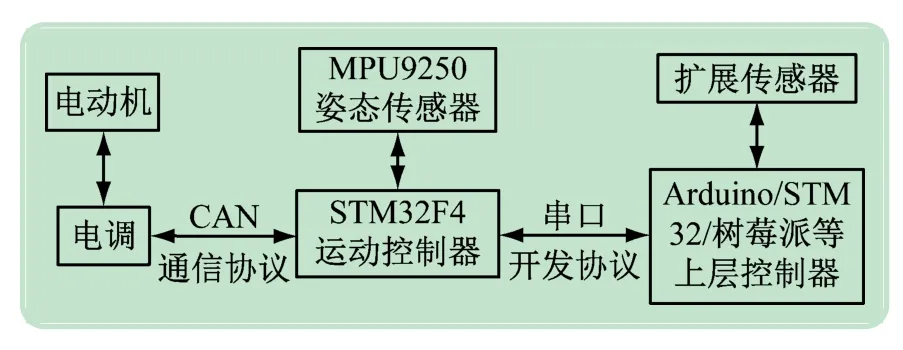
图5 控制系统框架示意图
2.2 运动控制算法
2.2.1 机器人运动学分析
为便于进行运动学分析,建立运动学方程,作以下假设:①机器人平台质量分布均匀,每个轮子的大小和质量相同,半径都为R;②机器人平台、轮子与路面均为刚体,忽略其变形影响;③轮子与地面不打滑,摩擦力足够大;④忽略机器人的加工安装误差,假设轮子与地面的接触点在轮子中心的正下方,轮子到中心的距离相等。
图6为机器人平台3种构型运动学模型坐标系,其中XOY为机器人自身坐标系,点O为平台几何中心点;XwOwYw为世界坐标系。
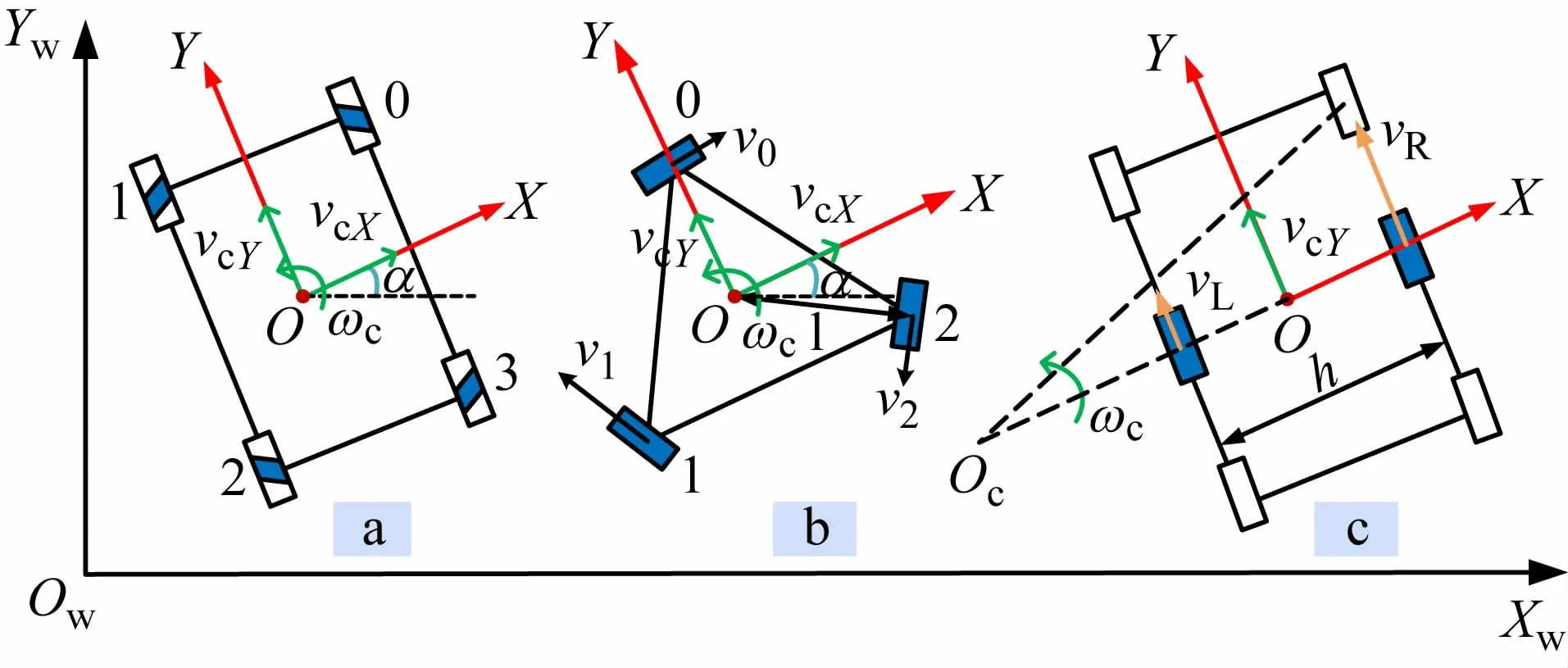
图6 机器人平台3种构型运动学模型
(1)麦克纳姆轮机器人运动学分析。麦克纳姆轮机器人平台的4个麦克纳姆轮采用“内八字”布置[13-14],在自身坐标系中,可得4个轮子的转速公式与平台的运动参数之间的关系为

式中:rX(rY)分别为机器人麦克纳姆轮中心到平台O点在X(Y)方向上距离,rXY=rX+rY;ω0、ω1、ω2、ω3分别为相对应麦克纳姆轮的转速;vcX(vcY)为在自身坐标系中沿X(Y)方向的平移速度,与坐标轴一致为正;ωc为平台O点在自身坐标系中绕Z轴角速度(平台的转向速度),逆时针为正;R为麦克纳姆轮半径。
平台运动控制需要得知其在世界坐标系下的麦克纳姆轮转速与平台运动参数的关系,可通过坐标转换将式(1)的关系转换成世界坐标系下运动关系为
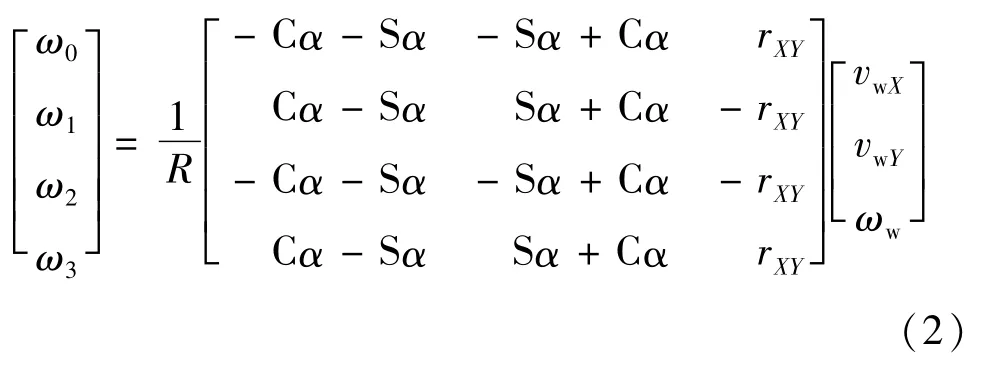
式中:α为X与Xw之间的夹角;Cα=cos α;Sα=sin α;vwX(vwY)为在世界坐标系中沿X(Y)方向的平移速度;ωw为在世界坐标系中转弯速度。
(2)全向轮机器人运动学分析。全向轮机器人平台的3个全向轮的布局如图6中b的坐标所示,以平台中心O点为圆心平均分布。通过速度矢量关系[15]可得出在自身坐标系中轮子转速与平台运动参数的关系为式中:ω0、ω1、ω2分别为相对应全向轮的转速;l为全向轮机器人平台O点到轮子中心的距离。
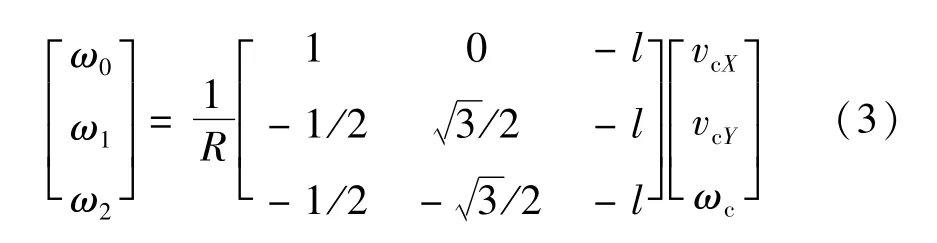
与前面推导一致,得到世界坐标系中轮子转速与平台运动参数的关系表示为
(3)带机器人运动学分析。履带机器人平台移动是由2个驱动轮分布在平台左右两侧,其在自身坐标系中没有全向移动能力只有Y方向的平移运动和转向运动,左右两侧轮子转速与平台运动参数的关系[16]可表示为

式中:h为左右两边驱动轮径向平面的距离;ωL、ωR分别为左右轮的转速。
世界坐标系中轮子转速与平台运动参数的关系表示为

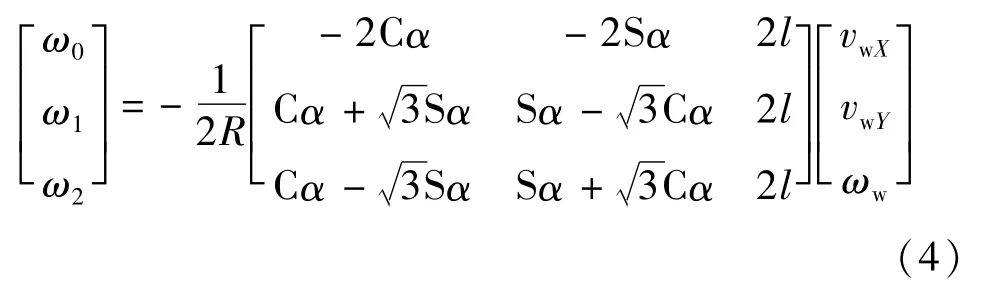
2.2.2 机器人移动速度与转向控制
机器人移动速度取决于电动机的转速。本文采用PID闭环控制算法,CAN线通过电动机编码器获得电动机的实际转速,将其与通过逆运动学解算得到的设定转速的差值输入转速PID控制器进行运算,再将结果通过CAN线输出给C620电调控制电动机转速,从而实现对机器人移动速度的控制,如图7所示。
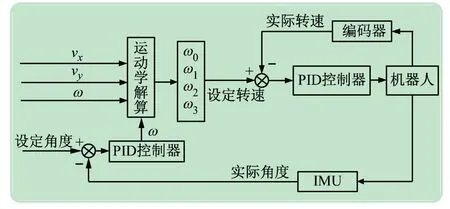
图7 机器人速度与转向控制框架
机器人转向是以角速度为被控变量,通过MPU9250获得机器人的实际姿态,将用户的设定角度与实际角度进行差值运算作为角度PID控制器的输入,然后输出角速度从而实现机器人转向控制。
2.2.3 机器人通信架构
本文机器人平台的底层运动控制器STM32F4采用串口与上层控制器通信,通过设定的通信协议将上层控制系统发送来的数据进行解析,得到机器人构型、运动速度、加速度、旋转角度以及选择的坐标系等信息后,运行相应的运动控制算法,实现机器人运动控制。
3 实验平台测试与验证
为验证所设计的多构型移动机器人实验平台的有效性和测试效果,利用实验平台的模块化可拼装机械套件,搭建出3种类型的移动机器人平台,如图8所示。组织学生经多批次创新实验验证,2名学生为一组,每组学生分别对5种构型的移动机器人进行搭建,搭建的内容包括机械套件的搭建、控制系统的接线。经统计,每组学生每搭建1种机器人,平均耗时为1~2 h,表明本文设计的多构型移动机器人实验平台,采用模块化可拆装设计的机械套件,可实现快速、方便的搭建。此外,标准孔距的多孔零件设计,搭配模块化连接件,可以适应不同的执行机构和任务模块的搭载,满足不同的需求。
图8 多构型移动机器人模块化搭建测试
为测试移动机器人平台的运动控制性能,对全向轮机器人和麦克纳姆轮机器人进行各个方向的全向移动测试,如图9所示,机器人能精准地跟踪给定的运动控制指令。由于履带式机器人没有全向移动能力,所以仅测试了沿机体方向的移动。同时,为测试机器人的转向控制功能,还做了不同角度的转向测试,测试效果见图9。测试结果表明,麦克纳姆轮和全向轮机器人具有较好的全向移动能力,最大移动速度可达3 m/s。同时,3种构型的机器人都可实现精准的转向控制,最大转向速度达90°/s。

图9 3种移动机器人运动性能测试
如图10所示,履带式机器人可以轻松越过10 cm高的障碍物;搭载了灰度传感器与视觉传感器的麦克纳姆轮机器人顺利完成地面黑线循迹跟踪和目标动态跟随测试;创新实验测试中学生需依据任务进行了部分二次开发。结果表明:本文所设计的多构型移动机器人实验平台具有快速的搭建性能、集成的运动控制算法和较好的功能扩展性,可以满足机器人多构型的需求。
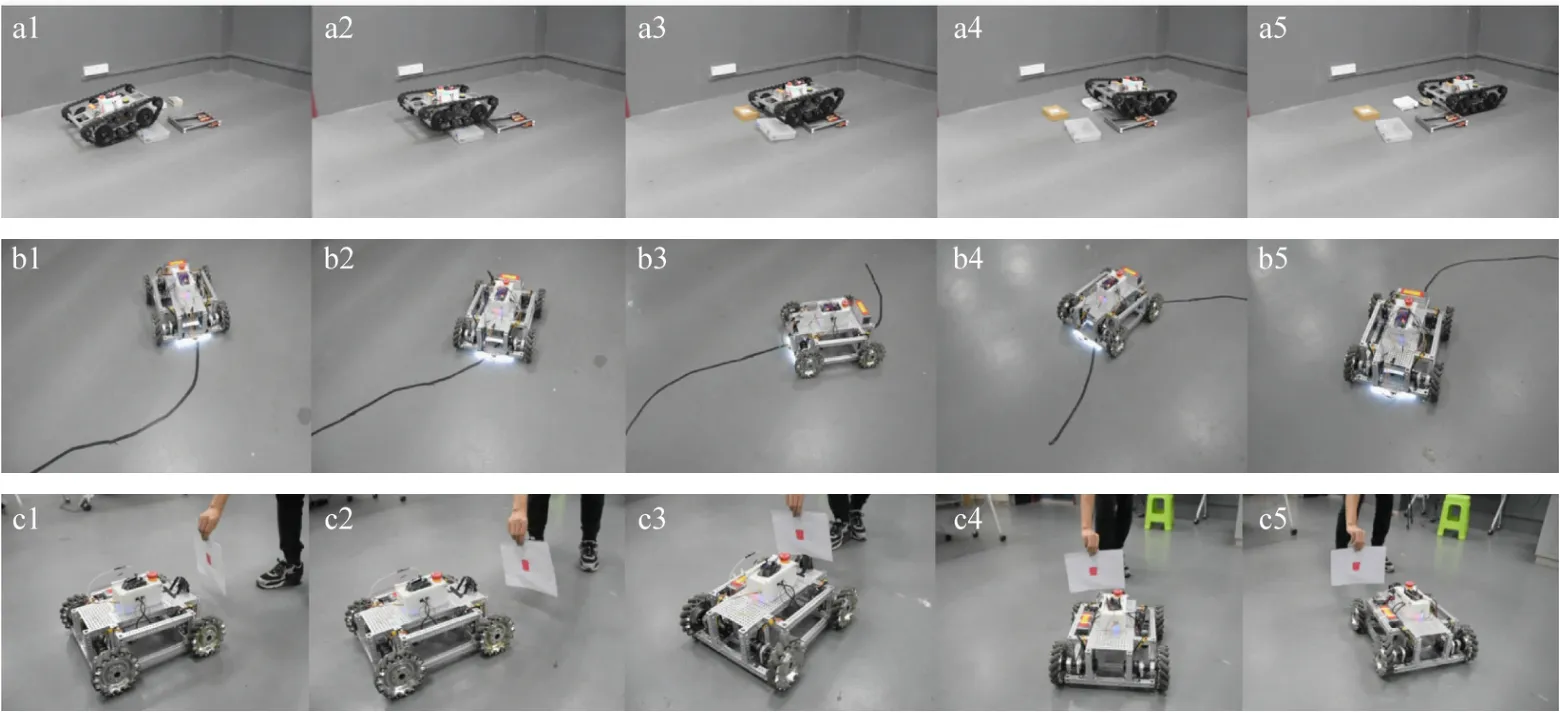
图10 机器人功能测试实验
4 结 语
本文设计并搭建的多构型移动机器人实验平台经过创新实验测试表明:该机器人平台可以方便、快速地组装麦克纳姆轮、全向轮及履带等多种类型的移动机器人平台;利用Arduino/STM32/树莓派等上层控制器通过串口通信可以调用开发的底层运动控制算法实现机器人的精准运动控制;移动速度可达3 m/s,转向速度可达90°/s;设计的UART、IIC、模拟/数字引脚等接口可连接灰度、视觉等不同类型的传感器并进行二次开发。该平台可作为机器人领域创新人才培养提供教学和创新实践的模块化支撑平台,也可应用于机器人执行机构的创新或上层控制算法的学习、验证与研究,具有广泛的应用前景。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
军民两用技术与产品(2022年1期)2022-06-01
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
现代仪器与医疗(2021年1期)2021-06-09
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
石油化工建设(2020年1期)2020-08-24
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
