
丘陵山地拖拉机加载仿形试验台设计
2022-09-22 11:01朱忠祥陈一明翟志强朱少华毛恩荣
中国农业大学学报 2022年10期
朱忠祥 陈一明 翟志强* 朱少华 毛恩荣
(1.中国农业大学 工学院,北京 100083;2.农业农村部土壤-机器-植物系统技术重点实验室,北京 100083)
目前,我国在拖拉机悬挂系统的试验研究方面,主要采用田间试验验证的方式,存在试验条件复杂,可重复性差,试验过程易受季节等因素影响,以及试验周期长、成本高等问题[1-2]。随着测控技术的发展,通过搭建室内模拟试验系统[3-7]进行拖拉机作业阻力模拟加载试验,为拖拉机悬挂系统试验研究提供了新途径,对于提高开发效率和节省开发成本具有重要意义;但目前已有的室内模拟试验系统往往采取固定拖拉机后桥的形式,无法进行坡地作业模拟,因此不适用于丘陵山地拖拉机悬挂系统的试验研究。
国内对于拖拉机悬挂系统室内试验台方面的研究始于沙闻球[8]研制的液压悬挂系统综合试验台,该试验台为拖拉机液压悬挂系统的调节特性研究与提升工况的动态性能试验提供了一种新的研究思路。同时刘长年[9]针对拖拉机悬挂系统牵引阻力调节系统的研究,采用了电液加载系统模拟拖拉机牵引阻力,该方法可以模拟液压悬挂系统在耕作过程中的定比阻与变比阻等多种状态工况。随着研究的深入,国内外已有研究对拖拉机室内仿真试验平台的动态特性和受力机理提出了诸多解决方案,如谭彧等[10-12]从液压悬挂试验台架、系统动态特性等方面开展研究,并在此基础上引入微机控制技术,建立了犁的土壤阻力数学模型,由阻力控制系统可模拟不同土壤和地表条件下犁的受力情况。吕栗樵等[13]设计了加载油缸可沿水平导轨移动的液压悬挂试验台,使得悬挂提升过程中加载力始终垂直于地面,与所模拟的农具重力方向一致。在丘陵山地拖拉机研究方面,针对车身横向稳定性[14-17]、车身调平[18]和农机具调平[19-20]等车身与电液悬挂系统控制方面开展了较多工作并取得了代表性成果,然而在室内仿真试验台设计方面,相关研究仍然缺乏。
鉴于此,本研究拟研发一种可模拟拖拉机作业坡度和犁具作业阻力的丘陵山地拖拉机的室内仿真试验系统,以期为开展电液悬挂控制系统试验研究提供一种有效试验装置。
1 丘陵山地拖拉机作业状态与受力分析
丘陵山地具有地形坡度缓慢变化,起伏不定的特点,出于安全与作业效率的因素考虑,丘陵山地拖拉机在丘陵山区作业时采取沿着坡地等高线的作业形式,故需对丘陵山地拖拉机电液悬挂系统的水平倾角进行控制研究。本研究以TS-404H丘陵山地拖拉机为研究对象,作业方式为犁耕,作业路线沿坡地等高线。丘陵山地拖拉机在坡地耕作时,坡度角α为0°~15°[21],车身近似保持水平状态,犁具需倾转调整至与坡面近似平行,丘陵山地拖拉机作业状态示意见图1。该型拖拉机配套的犁具为三铧犁,单犁工作幅宽为0.25 m,试验台所模拟的土壤比阻取0.3 MPa。

α为坡度角,范围为0°~15°。α is the slope angle, the range is 0°-15°.1.丘陵山地拖拉机;2.电液悬挂控制阀;3.悬挂系统提升液压缸;4.犁体1.Hilly and mountain tractor; 2.Electro-hydraulic hitch control valve;3.Lifting hydraulic cylinder of hitch system; 4.Plow
以拖拉机后轮与地面接触点为原点O,拖拉机前进方向为水平坐标轴X,竖直方向为坐标轴Y建立直角坐标系。拖拉机作业过程中,整机和犁体受力分析见图2和图3。

后轮与地面接触点为原点O;拖拉机前进方向为水平坐标轴X;竖直方向为坐标轴Y。Yg为拖拉机重心距地面距离;Xn为农机具重心至Y轴的距离;Xg为拖拉机重心至Y轴的距离。G为拖拉机重力;Gn为农具重力。The point of contact between the rear wheel and the ground is the origin O;The forward direction of the tractor is the horizontal coordinate axis X; The vertical direction is the coordinate axis Y.Yn is the distance from the center of gravity of the tractor to the ground; Xn is the agricultural machinery, the distance from the center of gravity to the Y axis; Xg is the distance from the center of gravity of the tractor to the Y axis.G is the gravity of the tractor; Gn is the gravity of the agricultural machinery.

P为犁体受到土壤阻力的等效受力点;G为犁体的重心;E为犁体的几何中心。H为耕深;Sxy为犁尖至土壤阻力方向上的距离;SRx为合受力点与水平面的距离;SRy为等效受力点至犁尖的距离;Φ为土壤阻力与水平面夹角。Rxy为土壤阻力;Rx为土壤阻力的水平分力;Ry为土壤阻力的水平分力;Fd为铧犁重力;Lx为犁耕过程中摩擦阻力。P is the equivalent force point of the plough body subjected to soil resistance; G is the center of gravity of the plough body; E is the geometric center of the plough body.H is the tillage depth; Sxy is the distance from the plow tip to the soil resistance direction; SRx is the distance between the combined force point and the horizontal plane; SRy is the distance from the equivalent force point to the plow tip; Φ is the angle between the soil resistance and the horizontal plane.Rxy is the soil resistance; Rx is the horizontal component of the soil resistance; Ry is the horizontal component of the soil resistance; Fd is the gravity of the plow; Lx is the frictional resistance during ploughing.
犁体所受土壤阻力Rxy,可分解为水平阻力Rx和竖直阻力Ry[22],公式分别为:
Rx=p·H
(1)
(2)
式中:H为耕深,m;p、q为阻力系数,与土壤土质相关。犁体所受总的水平阻力RH为:
RH=Rx+Lx=Rx+fRz
(3)
式中:Lx为稳定工作时犁侧板与沟壁的摩擦力,N;f为摩擦因数,一般f=0.3~0.8,取0.6;Rz为土壤对犁侧板的横向反作用力,N,本研究取为Rx/3[23]。由式(3)得:
RH=1.2Rx≈npkpbpH
(4)
式中:np为犁具配套犁体数;kp为犁耕比阻,kp=kp0+kpR,其中kp0为均质土壤下耕作比阻,其值为定值,kpR为非均质土壤下耕作时比阻变化扰动量,Pa;bp为单犁体工作幅宽,m。
由式(2)得,垂直阻力Ry可分解为动态分量RD和稳态分量RW,其中动态分量RD为:
(5)

稳态分量RW为:
RW=qH
(6)

(7)
由以上分析可知:1)该试验台的加载系统需使用2套独立的液压系统模拟拖拉机悬挂农机具在耕作过程中的受力情况,在一定土壤条件以及耕深稳定情况下,垂直阻力Ry可以视为常量,故可使用垂直安装的阻尼缸模拟垂直阻力;2)水平阻力Rx=p·H,则由一个水平安置的加载油缸与拖拉机前进方向相反的方向作用于犁体,进而模拟土壤阻力作用,这样可以简化加载系统。
2 加载仿形试验平台系统设计
2.1 加载仿形试验台总体方案
根据拖拉机在丘陵山地的作业需求,试验台由4部分组成:仿形模块、加载模块,测控系统与辅助装置。仿形模块用于模拟拖拉机作业坡地坡度变化,结构包括支撑液压缸、前后轮固定台、连接横摆臂和前后轮轮托板,与液压缸铰接的前后轮托板在两支支撑液压缸的驱动下提升拖拉机的一侧车轮,从而实现试验台仿形功能。为保障试验过程安全以及覆盖所需坡度角范围,仿形模块设计坡度角范围为-2°~16°,设定以拖拉机右侧车轮高出水平面为正。加载模块用于模拟犁具所受土壤阻力,竖直安装的阻尼缸用于模拟竖直阻力、水平布置的加载液压缸模拟水平阻力。测控系统包括支撑液压缸内位置传感器、拉压力传感器、销轴式力传感器、倾角传感器与控制器等电子元器件组成。辅助装置包括吊装保护装置与油源等液压系统元件。为适应不同型号拖拉机与农机具,仿形模块与加载模块安装布置于T型槽钢底座,可根据不同型号拖拉机的参数进行相应的位置调节。加载仿形试验台结构见图4。

1.前轮固定台;2.连接横摆臂;3.前轮托板;4.T型槽钢底座;5.前轮支撑液压缸;6、10.支撑液压缸底座;7.前轮托板垫台;8.后轮托板;9. 后轮支撑液压缸;11. 后轮托板垫台;12.阻挡架;13.阻尼缸支架;14.阻尼缸;15.加载缸;16.后轮固定台;17.拖拉机后轮;18.阀块台;19.比例伺服阀块1.Front wheel fixing table; 2.Connecting the swing arm; 3.Front wheel support plate; 4.T-slot base; 5.Front wheel support hydraulic cylinder; 6,10.Support hydraulic cylinder base; 7.Front wheel support plate pad; 8.Rear wheel support; 9.Rear wheel support hydraulic cylinder; 11.Rear wheel support pad; 12.Blocking frame; 13.Damping cylinder bracket; 14.Damping cylinder; 15.Loading cylinder; 16.Rear wheel fixing table; 17.Tractor rear wheel; 18.Valve block table; 19.Proportional servo valve block
加载仿形试验台的坡地仿形模块液压系统由比例伺服阀、单向节流阀和支撑液压缸组成,用于支撑并提升拖拉机的一侧车轮,形成拖拉机的作业坡角度。加载模块由比例伺服阀和加载液压缸组成,作用于犁体模拟水平负载;由截止阀、可调节溢流阀和阻尼液压缸构成的阻尼系统,通过阻尼力模拟犁体所受的垂直阻力。本研究所设计的加载仿形试验台液压系统见图5。

1.油箱;2.温度计;3.电机;4.泵;5.油液滤清器;6、17.安全溢流阀;7.冷却器;8.手动换向阀;9、12.截止阀;10.可调节流阀;11. 阻尼液压缸;13、16.三位四通比例伺服阀;14.双作用加载液压缸;15.压力表;18、20.双作用支撑液压缸;19、21.单向节流阀1.Oil tank; 2.Thermometer; 3.Motor; 4. Pump; 5.Oil filter; 6 and 17.Safety relief valve; 7.Cooler; 8.Manual valve; 9 and 12.Shut-off valve; 10.Adjustable flow valve; 11.Damping hydraulic cylinder; 13 and 16.Three-position four-way proportional servo valve; 14.Double acting hydraulic cylinder; 15.Pressure gauge; 18 and 20.Double-acting support hydraulic cylinder; 19 and 21.One-way throttle valve
2.2 试验台与悬挂系统数学模型
该试验台的坡地仿形模块由2个支撑液压缸驱动,前后轮固定台、连接横摆臂和前后轮托板形成平行四杆机构,前后轮托板在连接横摆臂的约束作用下,保持水平状态沿着弧形路径运动,形成坡度角β。坡地仿形模块运动分析见图6。在支撑液压缸驱动下,右侧车轮托板升降产生的坡度角β和支撑液压缸活塞位移δ的关系式为:

Ⅰ、Ⅱ.试验台平行横摆臂和车轮轮托板的初始位置和目标位置。A、B分别为横摆臂与为车轮固定台上下铰接点;C、D分别为横摆臂与车轮托板上下铰接点;E、F分别为支撑液压缸与车轮托板与垫台铰接点;C′、D′和E′分别为C、D和E的目标位置。1为前后轮固定台;2、3分别为初始位置的连接横摆臂;4为初始位置的前后轮托板;2′、3′分别为目标位置的连接横摆臂;4′为目标位置的前后轮托板。β为坡度角;δ为活塞位移。Ⅰ and Ⅱ. the initial position of the parallel swing arm and the wheel support plate of the test bench and the target positionA and B are the upper and lower hinge points of the swing arm and the wheel fixing platform respectively; C and D are respectively the upper and lower hinge points of the yaw arm and the wheel support plate; E and F are the hinge points of the support hydraulic cylinder, the wheel support plate and the cushion platform, respectively; C′, D′ and E′ are the target positions of C, D and E.1 is the front and rear wheel fixing platform; 2 and 3 are the connecting swing arms at the initial position; 4 is the front and rear wheel support plates at the initial position; 2′ and 3′ are the connecting swing arms at the target position; 4′ is the target position front and rear wheel brackets.β is the slope angle; δ is the displacement of the piston.
(8)
式中:l为连接横摆臂的长度,mm。
本研究所使用电液悬挂系统的特点在于采用2个提升液压缸代替左、右两侧上拉杆。其工作原理是,当拖拉机右侧车轮高于左侧车轮时(沿着拖拉机行驶方向),左侧提升液压缸5活塞缩回、右侧提升右液压缸活塞伸出时,左侧下拉杆6绕着其与拖拉机车身的铰接点向上转动,右侧上拉杆绕着其与拖拉机车体的铰接点向下转动,从而犁架7顺时针转动(可视为犁架7以下拉杆与犁架两铰接点的中心P转动),用于调节犁架7的水平倾角,以达到犁架7与坡地近似平行的效果。N点为提升液压缸与拖拉机车身的铰接点,H为左侧下拉杆6与拖拉机的铰接点,I为过N点的竖直线与左侧下拉杆6的垂线的交点,M为左侧下拉杆6与犁架7的左侧铰接点,K为左侧提升液压缸5与左侧下拉杆6铰接点。拖拉机电液悬挂机构的运动分析简图(悬挂系统的左向视图与正向视图)见图7。

N为左侧提升液压缸与拖拉机车体铰接点;H为左侧下拉杆与拖拉机车体铰接点;I为过N点竖直线与过H点和左侧下拉杆垂线的交点;K为提升液压缸与左侧下拉杆铰接点;M和Q分别为两下拉杆与犁架的左、右两铰接点;M'和Q'分别为犁架转动后的两铰接点位置;P为M、Q连线的中点;T和T'分为别为犁架转动前、后的顶点位置。5为左侧提升液压缸;6和7分别为犁架转动前的左侧下拉杆和犁架;6′和7′分别为犁架转动后的左侧下拉杆和犁架。βK为提升杆液压缸轴线与竖直方向夹角;βN为N、B连线与竖直方向的夹角;αn为犁架水平倾角;αH为下拉杆转动角度。N is the hinge point between the left lifting hydraulic cylinder and the tractor body; H is the hinge point between the left lower rod and the tractor body; I is the intersection of the vertical line passing through point N and the vertical line passing through point H and the left lower rod; K is the lifting hydraulic cylinder and the left lower rod. Pull rod hinge point; M and Q are the left and right hinge points of the pull rod and the plow frame, respectively; M′ and Q′ are the two hinge points after the plow frame is rotated; P is the midpoint of the line connecting M and Q; T and T′ are the rotation of the plow frame respectively Front and back vertex positions.5 is the left lifting hydraulic cylinder; 6 and 7 are the left lower rod and the plow frame before the plow frame is rotated; 6′ and 7′ are the left lower rod and the plow frame after the plow frame is rotated.βK is the angle between the axis of the lifting rod hydraulic cylinder and the vertical direction; βN is the angle between the line connecting N and B and the vertical direction; αn is the horizontal inclination of the plow frame; αH is the rotation angle of the lower rod.
在ΔNBE中,有以下平面运动关系
(9)
式中:x为提升液压缸活塞的位移,mm;lNH为N、H两铰接点之间的距离,mm;lBE为N、K两铰接点间的距离,mm;lNK0为提升杆液压缸的活塞杆完全缩进时N、K两铰接点的距离,mm;βK为提升杆液压缸轴线与竖直方向夹角,(°);βN为N、K两铰接点连线与竖直方向的夹角,(°)。αH的计算公式为:
(10)
LH=LsinαH
(11)
式中:LH为M点的位移距离,mm;L为H、M两铰接点间长度,mm。
设左、右液压缸伸出与缩回距离相同,则犁架水平倾角αn为:
(12)
式中:l为M、Q两铰接点之间的距离,mm。
3 控制系统建模仿真
3.1 控制方案设计
本研究所设计的试验台的坡地仿形控制与电液悬挂控制系统的工作原理为设定目标坡度角Uα后,坡地仿形模块将提升车轮托板至预定高度,由于本研究所使用的丘陵山地拖拉机不具备车身调平功能,因此车身随着车轮托板上升而产生与坡度角相同的倾斜角度,犁具随着车身倾转而转动,电液悬挂控制系统在接收到犁具倾角传感器信号后进行犁具的横向姿态调整,直至犁具恢复水平状态;试验台的加载控制系统工作原理为设定目标加载力U0后,加载液压缸作用于犁具,加载控制系统接收拉压力传感器反馈信号后进行加载液压缸活塞伸出量调整,实现拖拉机作业状态土壤阻力模拟加载。本研究中采用的控制算法为增量式PID算法[24],PID控制是一种将偏差进行比例、积分、微分的运算后叠加构成控制量,进而控制被控对象的一种常见的控制方法,具有算法简单、鲁棒性强等优点。坡地仿形控制原理见图8,加载控制原理见图9。
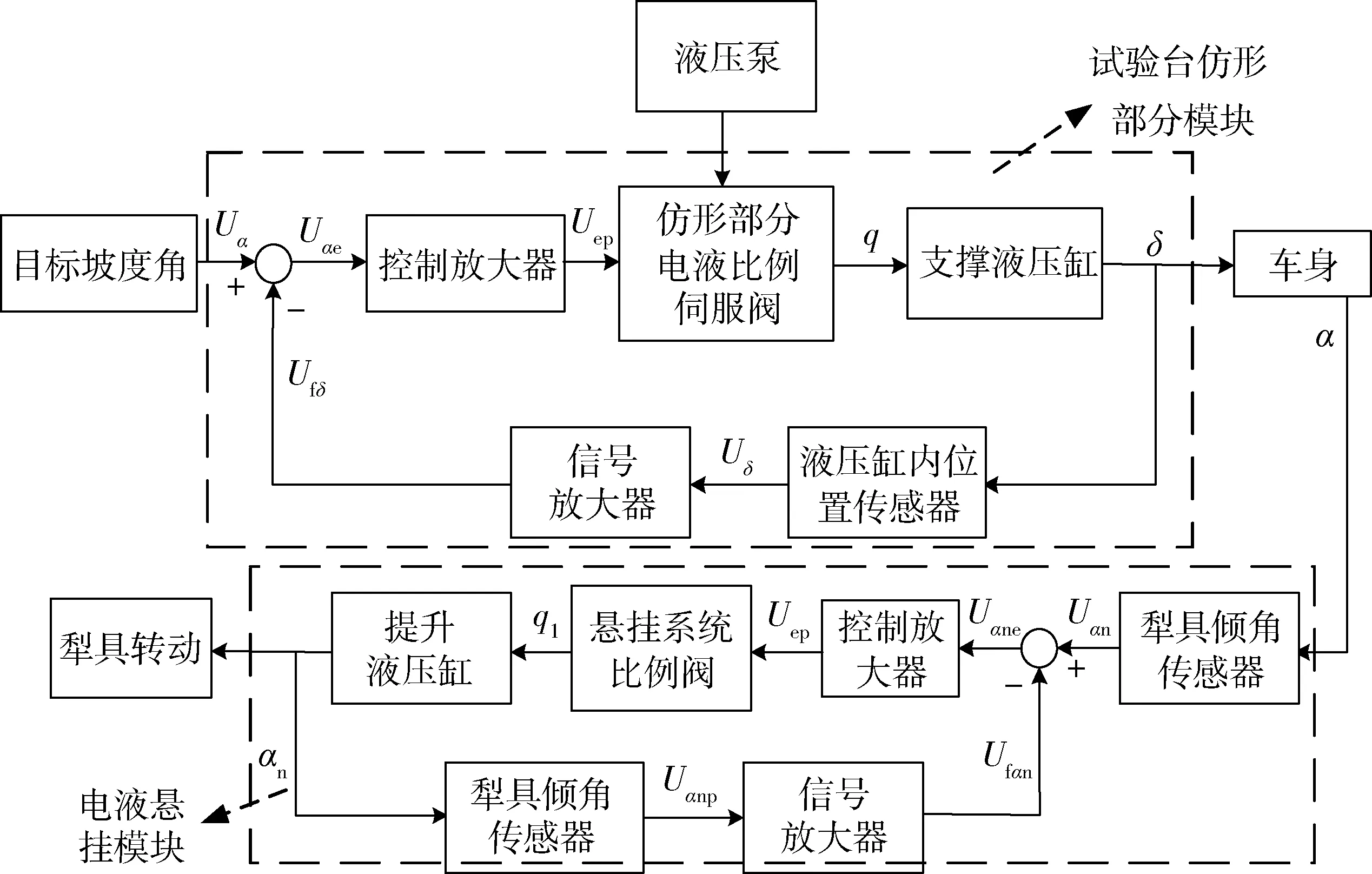
Uα为设定目标坡度角信号;Ufδ为支撑液压缸反馈信号;Uαe为试验台仿形控制系统误差信号;Uep为经过放大器的控制信号;Uδ为位移传感器输出信号;Uαn为犁具倾角传感器输出信号;Ufαn为电液悬挂系统反馈犁具水平倾角信号;Uαne为电液悬挂控制系统倾角误差信号;Uαnp为犁具倾角传感器输出信号。q和q1分别为仿形部分比例阀流量和悬挂系统比例阀流量;δ为液压缸活塞位移;α为车身倾斜角度;αn为犁具水平倾角。Uα is the set target slope angle signal; Ufδ is the feedback signal of the support hydraulic cylinder; Uαe is the error signal of the test bench copy control system; Uep is the control signal through the amplifier; Uδ is the output signal of the displacement sensor;Uαn is the output signal of the plough inclination sensor; Ufαn is the feedback signal of the horizontal inclination angle of the plough by the electro-hydraulic suspension system; Uαne is the angle error signal of electro-hydraulic suspension control system; Uαnp is the output signal of the plough inclination sensor.q and q1 are the proportional valve flow rates of copying part and suspension system, respectively; α is the inclination angle of the vehicle body; αn is the horizontal inclination of the plough.

U0为设定土壤阻力;UFfp为加载液压缸反馈信号;Ue为试验台加载控制系统误差信号;UFp为拉压力传感器输出信号;UF为销轴式力传感器输出信号。qFp为比例阀流量;F为犁具所受加载力。U0 is the set soil resistance; UFfp is the feedback signal of the loading hydraulic cylinder; Ue is the error signal of the test bench loading control system; UFp is the output signal of the tension and pressure sensor; UF is the output signal of the pin-type force sensor. qFp is the proportional valve flow; F is the loading force on the plow.
3.2 模型建立与仿真分析
坡地仿形模块与加载模块液压控制系统中,采用三位四通电液比例伺服阀和非对称活塞液压缸,其工作原理见图10。

PS和PO分别为进、出油口压力;Q1和Q2分别为无杆腔和有杆腔流量;P1、V1和A1分别为无杆腔压力、体积和活塞面积;P2、V2和A2分别为有杆腔压力、体积和活塞面积;F为液压缸负载载荷。xv为阀芯位移;y为活塞位移。PS and PO are oil inlet and outlet pressures, respectively; Q1 and Q2 are the flow rate of rodless cavity and rod-cavity; P1, V1 and A1 are the rodless chamber pressure, volume and piston area; P2, V2 and A2 are the rod chamber pressure, volume and piston area; F is the hydraulic pressure cylinder load load. xv is the spool displacement; y is the piston displacement.
假设此电液比例伺服阀为理想零开口四通滑阀,具有理想状态下的响应能力,阀芯的位移以及阀腔内的压降所引起的流量变化在瞬间完成。
阀的节流方程为:
qL=Kqxv-KcPL
(15)
其中
(16)
(17)
式中:cd为节流口流量系数;PS为三位四通电液比例伺服阀的进口供油压力,Pa;ρ为液压油密度,kg·m3;PL为负载压力,Pa;qL为负载流量,L·min;Kq为流量增益系数;Kc为流量压力增益系数;n为有杆腔与无杆腔有效面积比;xv为三位四通电液伺服阀的阀芯位移,mm;ω为振动角速度,rad/s。
流量连续性方程为:
(18)
式中:A1和A2分别为无杆腔和有杆腔液压缸作用面积,m2;V1为进油腔容积,m3;V2为回油腔容积,m3;βe为有效体积弹性模量;y为活塞运动位移,m;ct为液压缸总的泄漏系数;cec为液压缸外泄漏系数;cic为液压缸内泄漏系数。
液压缸力平衡方程为:
(19)
式中:F为作用在活塞上的外负载力,N;Bc为活塞及负载的黏性阻力系数;m为活塞及负载折算到活塞上的总质量,kg。
将(15)、(17)和(18)进行拉普拉斯变换,得该系统的传递函数为:
(20)
式中:Vt为进油腔与回油腔体积之和,m3;s为拉普拉斯变换算子。
运用AMEsim和Matlab联合仿真,在AMEsim中建立试验台系统动力学模型;在Matlab中建立自适应悬挂仿形液压系统动力学模型。根据试验台设计参数和自适应悬挂系统实测参数设定仿真模型参数见表1。
根据式(20)和表1,通过Matlab仿真得到加载系统的闭环系统伯德图,进而得到该试验台加载系统的闭环频率特性曲线(图11)。当加载系统幅值下降至-3 dB时所对应的角频率为41.2 rad/s,换算为8.49 Hz,故该试验台的加载系统能够满足电液悬挂系统的动态要求。

图11 加载系统的闭环频率特性曲线Fig.11 Frequency characteristic curve of the closed-loop loaded system

表1 试验台与悬挂系统液压系统模型参数Table 1 Test bench and hitch system hydraulic system model parameters
在Simulink中搭建试验台坡地仿形控制与电液悬挂控制系统仿真模型,仿真时长设置为10 s,试验台坡地仿形模块输入1 s开始阶跃的阶跃信号,仿真时长设置为10 s。试验台坡地仿形模块与电液悬挂系统1 s开始阶跃,阶跃值为0~240 mm,转化为坡度角为0°~11.5°,仿真结果见图12。
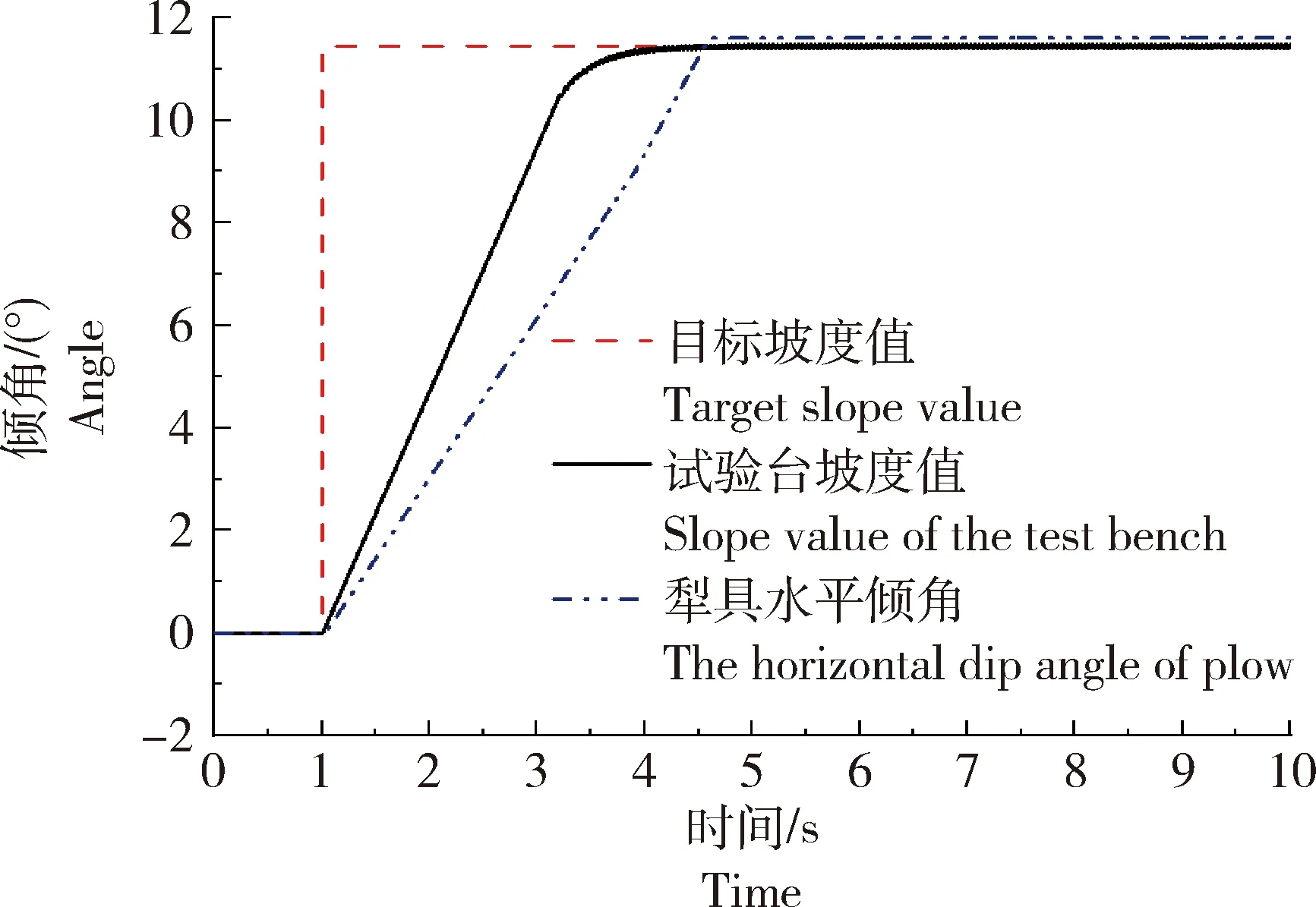
图12 犁具水平倾角仿真变化曲线Fig.12 Plow tool horizontal angle simulation change curve
坡地仿形模块的响应时间约为2.5 s,无超调。在3.5 s时,仿形模块达到预设坡度值11.5°,悬挂系统的响应时间约为1 s;经过4.5 s后,系统趋于稳定,此时犁具的水平倾角约为11.6°,稳态误差为0.1°。仿真结果表明,坡地仿形控制系统和悬挂控制系统响应速度快、精度高,符合试验需求。
4 台架试验验证
4.1 试验准备
试验系统控制软件基于LabVIEW开发,可实现的主要功能为:1)输出模拟量控制比例伺服阀开度,控制液压缸位移,实现坡地仿形控制和模拟加载控制;2)采集、监测并记录位移、加载力以及犁具水平倾角等试验数据。搭建试验台系统开展坡地仿形、模拟加载和悬挂自适应调节试验,设定拖拉机作业工况为犁耕作业、作业路径沿坡地等高线,作业坡度角变化分别设定为0°阶跃至11.5°,11.5°阶跃至15°;加载力变化分别设定为0 kN阶跃至6.5 kN,6.5 kN阶跃至4 kN,并根据试验台结构设计方案,搭建试验台与拖拉机电液悬挂系统,具体组成部分见图13。

1.拖拉机;2.支撑液压缸;3.前轮托板;4.阻尼液压缸;5、11.犁具;6.拉压力传感器;7.加载液压缸;8.左侧双作用提升仿形液压缸;9.右侧双作用提升仿形液压缸;10.销轴式传感器;12.倾角传感器1.Tractor; 2.Support hydraulic cylinder; 3.Front wheel support plate; 4.Damping hydraulic cylinder; 5 and 11.plow; 6.Pull pressure sensor; 7.Loading hydraulic cylinder; 8.Left double-acting lifting profiling hydraulic cylinder; 9.Right double-acting lifting profiling hydraulic cylinder; 10.Pin shaft sensor; 12.Inclination sensor
4.2 试验结果与分析
由于本研究中使用的丘陵山地拖拉机不具备车身调平功能,犁具将跟随拖拉机车身水平倾角而变化,故以犁具调整至水平为调整判断依据。坡度角到达11.5°,犁具水平倾角为11.9°。车身水平倾角到达15°,车身姿态稳定后电液悬挂系统控制犁具调平,犁具稳定后,犁具水平面倾角为-0.5°,坡地仿形和犁具悬挂调节试验效果见图14,试验结果见图15。

图14 坡地仿形和犁具调整效果图Fig.14 Slope profiling and plow adjustment effect diagram
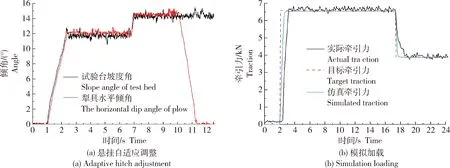
图15 悬挂自适应调整与模拟加载试验结果Fig.15 Adaptive hitch adjustment and simulated loading test results
由图15(a)可见,试验台仿形模块在1 s时刻启动,到达目标作业坡度11.5°的调整时间约为1.2 s,超调量约为9%,稳态误差约0.4°,最大误差为3.4%;试验台仿形模块由11.5°阶跃到目标作业坡度15°的调整时间约为0.5 s;稳态误差约为0.6°,最大误差为4.2%,电液悬挂控制系统在10 s时刻启动,系统响应时间约为1.3 s,稳态误差约为0.5°。由图15(b)可见,试验过程中加载系统在2 s时刻启动,仿真系统调整时间为0.4 s,由6.5 kN调节至4 kN时的调整时间约为0.2 s,最大误差≤1%。试验台加载模块在6.5 kN阶跃信号下的调整时间为1.2 s;作业阻力由6.5 kN调节至4 kN时的调整时间约为1.1 s。试验台加载系统最大误差为4%,平均误差为2%。该试验结果表明,所设计的试验台系统能够实现坡地仿形和作业阻力加载功能,可以完成在所要求的试验范围内进行电液悬挂系统控制试验研究;该试验台系统具有较高的控制精度与响应速度,能够满足丘陵山地拖拉机电液悬挂控制系统对试验设备的性能要求。
5 结 论
本研究针对丘陵山地拖拉机的作业需求,设计了一种适用于丘陵山地拖拉机工况模拟的室内仿真试验台,并在此基础上开展的模拟坡地角度变化的电液悬挂调节试验与模拟土壤阻尼阶跃变化的加载试验结果表明:对于11.5°的目标作业坡度角,坡地仿形系统的调整时间为1.2 s、稳态误差为0.4°;由11.5°阶跃至15°的调整时间约为0.5 s,稳态误差为0.6°,平均误差约3.8%。对于6.5 kN的静态作业阻力,该试验台加载系统调整时间为1.2 s,最大误差为4%,平均误差约为2%。本研究所设计的试验台可满足丘陵山地拖拉机电液悬挂控制系统所需的自适应悬挂系统调节与模拟加载试验。
猜你喜欢
机床与液压(2022年18期)2022-10-13
现代仪器与医疗(2022年3期)2022-08-12
广东造船(2022年3期)2022-07-09
汽车实用技术(2022年11期)2022-06-20
汽车实用技术(2022年7期)2022-04-20
土壤学报(2022年1期)2022-03-08
科学与技术(2018年9期)2018-04-30
幸福·婚姻版(2017年9期)2017-09-22
中国高新技术企业(2017年11期)2017-07-08
诗林(2016年5期)2016-10-25
