
机械手臂正运动学及其末端机械手工作空间研究
2022-09-22 01:23刘洪波耿德旭武广斌孙国栋梁正
机床与液压 2022年3期
刘洪波,耿德旭,武广斌,孙国栋,梁正
(北华大学机械工程学院,吉林吉林 132021)
0 前言
串联机械手臂具有操作工间大、灵活度高、适应性强等优势,在排险、军事、农业、养老助残、医疗防疫等领域应用广泛。机械手臂主要是协助机器人完成抓取、搬运等作业任务,其灵活程度将直接影响整个机械人最终的动态性能。工作空间即机械手臂末端执行器可达空间位置点的集合,可用来衡量机械手臂的灵活程度。因此,国内外学者采用不同求解方法对其工作空间等相关问题进行了大量研究。党浩明等通过定义中间变量,解决了矩阵连乘过程中存在重复乘积的问题,缩短了算法运行时间,通过对机械手臂正逆运动学模型求解,验证了算法的有效性。 孙野等人通过ADAMS与MATLAB联合仿真,研究机械手臂工作空间问题,但仿真时未考虑末端执行器尺寸对工作空间的影响。于瑞以多臂型铸件清理机器人为研究对象,对其工作空间进行了分析,并采用极值法提取了工作区域的边界曲线,但未对所建立的运动学模型准确性进行分析论证。
为减少刚性手爪对被抓取物体的伤害,本文作者将上海某公司生产的机械手臂末端手爪替换为自主研制的柔性机械手。根据机械手臂构型特点,基于改进后的D-H建立了机械手臂的运动学模型,通过对比计算与仿真结果验证了所建模型的准确性;采用蒙特卡洛法绘制出末端机械手可达空间点云图,并在此基础上分析得到了机械手臂各结构参数对末端机械手工作空间体积的影响规律。
1 机械手臂本构模型
本文作者研究的机械手臂由五自由度串联机械臂和自主研发的气动四指柔性机械手串联而成(图1)。五个关节依次为:肩旋转关节、肩摆动关节、肘关节和腕部两关节(俯仰、旋转)。末端执行器采用刚柔一体化的气动柔性四指机械手,该机械手可稳定抓取物体最大质量为1.38 kg,能够适应直径小于160 mm的柱体、球体、三角形和不规则物体,且抓取力可控,适用于易碎易损物体的抓取和搬运。其中,腕部两个关节对末端机械手的空间姿态进行调节;肩旋转关节、肩摆动关节和肘关节确定末端机械手的空间位置。机械手臂安装在履带式车体上,极大地扩展了操作空间,提高了工作柔性。

图1 机器手臂本体结构
2 机械手臂正运动学分析
为直观描述机械手臂结构特点,初始设定各关节角度值分别为====0,=-π/2。采用CRAIG提出的改进后的D-H法建立连杆坐标系(图2),表1是与之对应的D-H参数表。为简化模型,坐标系{0}和{1}固定在肩旋转关节中心处,坐标系{2}固定在肩摆动关节中心处,坐标系{3}固定在肘关节,坐标系{4}和{5}固定在腕部,坐标系{6}固定在机械手中心。

图2 机械手臂连杆坐标系

表1 机械手臂D-H参数表
2.1 机械手臂正运动学建模


(1)
将D-H表中各关节参数依次代入到式(1),可得相邻关节坐标系之间的变换矩阵:
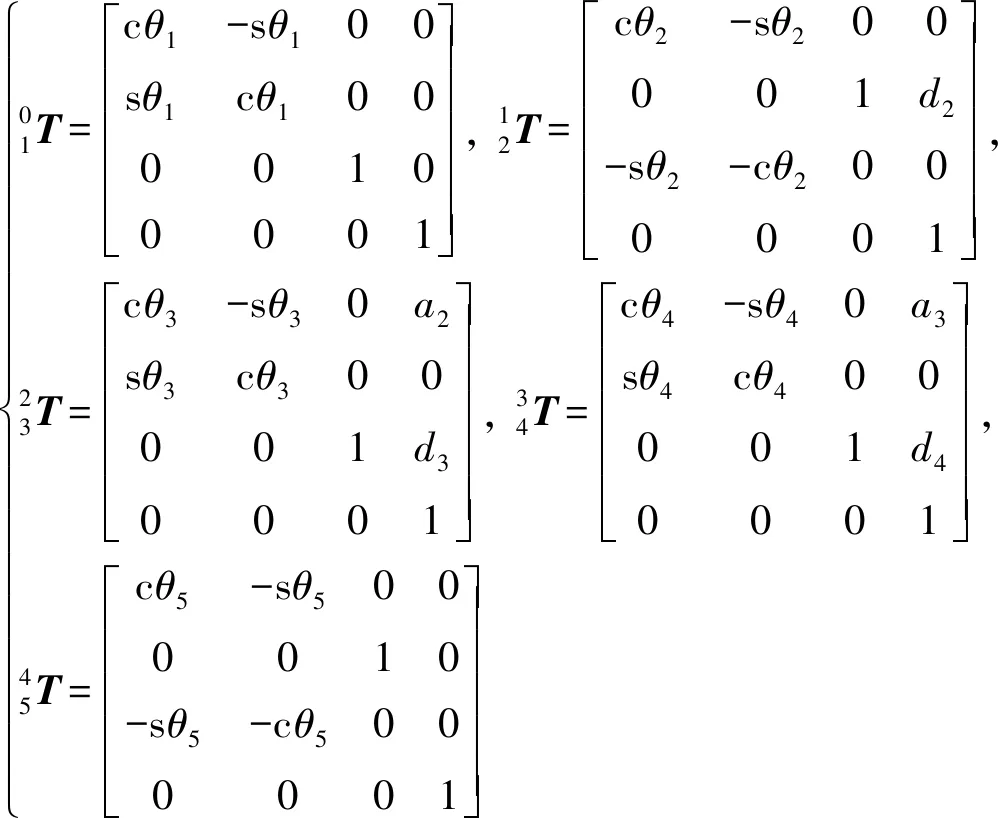
(2)
式中:c=cos;s=sin;=1,…,5。
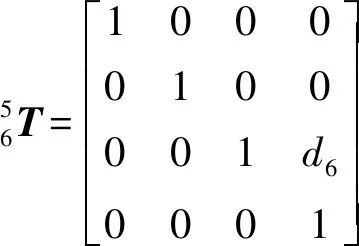
(3)
式中:=299.21 mm,为机械手与相关连接件的长度。
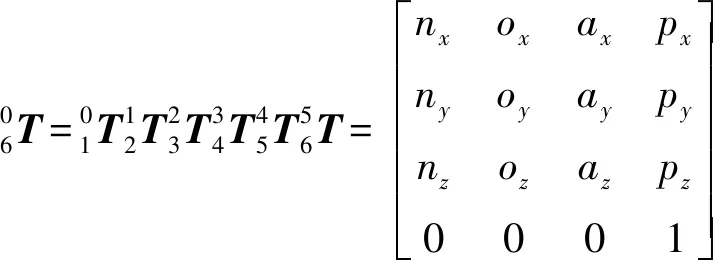
(4)
式中:[]、[]、[
]是末端机械手坐标系相对于基坐标系的姿态向量;[]是位置向量。末端机械手可达工作空间主要由位置向量决定,解得:

(5)
2.2 正运动学模型验证
利用MATLAB Robotics toolbox 10.3.1中的Link和drivebot函数构建机械手臂可视化模型。代入设定初始关节角度=(0,0,0,-π/2,0),此时机械手臂处于水平伸展状态(图3),与图2所示的连杆坐标系姿态一致,验证模型的正确性。

图3 机械手臂可视化模型
由图3可知:调节仿真模型中左下方的角度滑块可随机改变机械手臂各关节的角度值,机械手的位姿根据角度值的改变实时发生变化,进而可实现实时在线调控。
为进一步验证模型的准确性,随机选取5组符合各关节角度范围内的角度值分别代入式(3)和 Robotics toolbox 10.3.1建立的可视化模型中计算,并将得到的位置向量进行比较(表2)。
随机选取5组角度值为


表2 理论计算值与仿真求解值对比
从表2可以看出:经过5次随机取值,由正运动学方程理论计算求出的机械手位置向量与仿真计算得到的结果误差相对较小,验证了所建模型的准确性。
3 末端机械手工作空间分析
机械手臂工作空间由末端执行性可达空间所有位置点的集合构成,其形状和尺寸对于机械手臂合理的结构设计具有重要的指导意义。相比栅格法和几何法,蒙特卡洛法(Monte Carlo Method) 因具有强大的图形显示功能、计算速度快和简单易行的特点,常应用于机械手臂工作空间的求解。 在MATLAB中,可通过编程方式完成蒙特卡洛法对机械手臂工作空间的求解,流程如图4所示。

图4 工作空间求解流程
仿真时,随机取=50 000,求得末端机械手可达空间点云图(图5)。

图5 末端机械手可达空间点云图
从图5可知:末端机械手的可达工作空间形状近似为球体,且运动空间内无空洞,即机械手臂几乎可以达到区域内的所有空间。
为进一步分析末端机械手的移动范围,提取工作空间边界面上的点并构造机械手臂在、、3个平面上的边界曲线(图6)。可知:末端机械手工作空间沿、、三轴的移动范围依次为[-1 435.534, 1 434.791]mm、[-1 465.371, 1 460.124]mm、[-1 466.753, 1 466.017]mm。

图6 工作空间轮廓边界
4 末端机械手工作空间体积计算
图5仅描绘末端机械手可达工作空间点云图的大致形态,若要进一步求解工作空间体积,就必须创建一个较为精准的包络空间,并计算该包络空间体积大小来描述工作空间。为此,利用MATLAB中convhull函数提取点云图中边界面上的点,并在此基础上生成由诸多三角面片拼接而成的包络空间(图7)。经计算,该包络空间即末端机械手的工作空间体积为13.24 m。
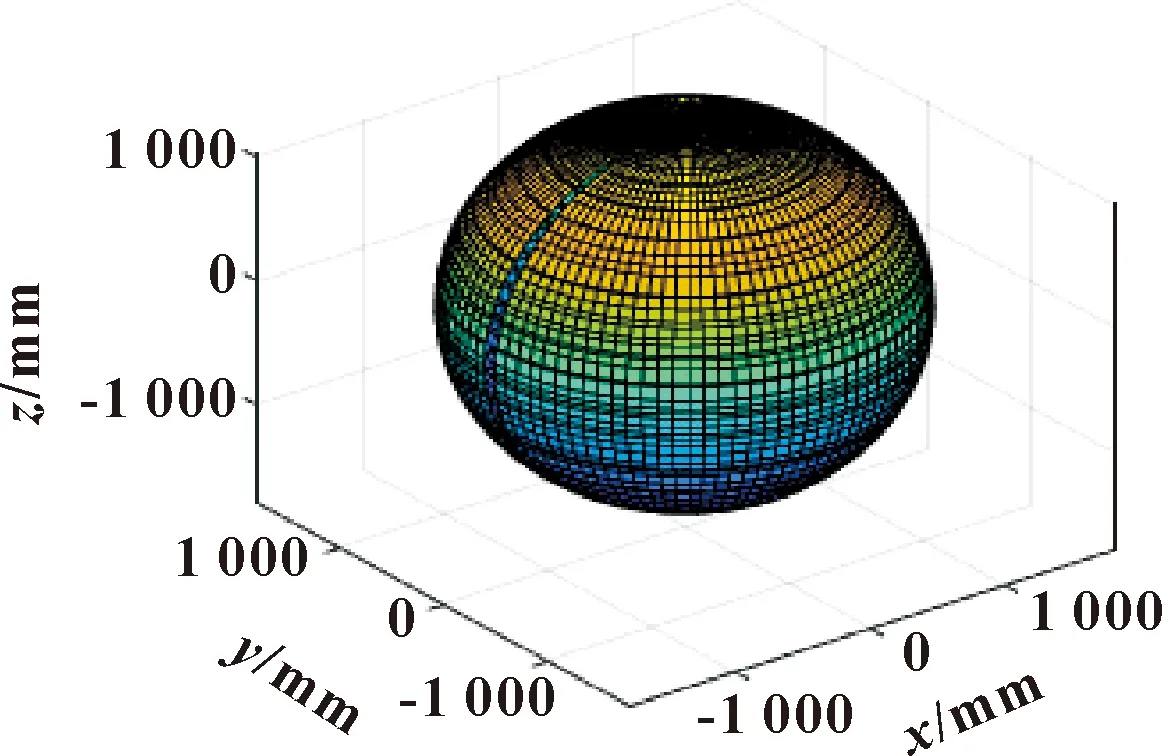
图7 利用convhull函数生成的包络空间
4.1 各杆长和偏置距离对工作空间的影响
在保证其他参数不变的情况下,计算各连杆长度以及关节轴线间偏置距离对工作空间的影响(图8)。

图8 杆长及偏置距离对工作空间体积影响
从图8可以看出:机械手臂各杆长及偏置距离等5个参数皆对工作空间产生正相关的影响,但影响程度不同,杆长对工作空间影响最大,然后依次为杆长、偏置距离、、、。
4.2 各关节转角对工作空间的影响
通过单独改变机械手臂某一关节转角范围来分别计算各关节转角对其工作空间的影响(图9)。

图9 关节转角范围变化对工作空间体积影响
从图9(a)可知:随着肩旋转关节转角范围的不断增加,机械手臂工作空间的体积也随之增大。当肩旋转关节转角范围为-178°~178°时,工作空间体积从0增加到13.24 m。图9(b)和9(c)为肩摆动关节和肘关节对工作空间体积的影响,工作空间体积与转角值皆呈正相关的变化趋势。从图9(d)中可知,腕部俯仰关节转角变化对工作空间体积影响较小,且曲面凸凹不平。
5 抓取应用实验
气动四指机械手的抓取实验验证了机械手具有稳定灵活的抓取能力。将机械手臂安装在履带式机器人上,可用于餐饮服务行业,实现了食品和餐饮器具的柔性抓取问题,提高了效率,减轻了劳动强度。图10为机械手臂对餐饮器具抓取实验,具体步骤如下:车体先运动到合适位置;其次调整前3个旋转关节,使机械手对准物体,然后调整腕部两关节使目标物体位于机械手包裹区域内;最后对机械手各手指施加气压,通过各手指间的相互配合来完成抓取任务。

图10 机械手臂抓取实验
6 结论
(1)基于改进的D-H法建立了机械手臂正运动学模型,推导得末端机械手的位置向量与各关节转角之间的关系,并通过仿真结果与理论计算相对比验证了模型的正确性。
(2)采用蒙特卡洛法得到了末端机械手可达空间点云图,并通过提取工作空间边界曲线,获得末端机械手沿、、三轴的移动范围依次为[-1 435.534,1 434.791]mm、[-1 465.371, 1 460.124]mm、[-1 466.753, 1 466.017]mm。
(3)采用convhull函数生成包络空间的方法,求得了末端机械手工作空间体积13.24 m。通过单一变量法分析了机械手臂各杆长及关节转角等参数对工作空间体积的影响。结果表明:杆长对工作空间影响最大,其次为杆长,偏置距离影响最小;各关节转角对工作空间影响程度由大到小依次为肩旋转关节、肩摆动关节、肘关节和腕部俯仰关节。
(4) 进一步在非结构化环境中测试了机械手臂可完成对不同形状物体的稳定抓取、搬用等任务,验证了该机械手臂的实用性。
猜你喜欢
中国设备工程(2022年15期)2022-08-19
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
哈尔滨轴承(2020年3期)2021-01-26
今日农业(2020年14期)2020-12-14
电子制作(2019年13期)2020-01-14
模具制造(2019年10期)2020-01-06
环球时报(2019-07-18)2019-07-18
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
少儿科学周刊·少年版(2015年4期)2015-07-07
