
基于图像处理和标识物的裂缝变化测量方法
2022-09-21 08:14谢东辉李登华
工程质量 2022年8期
李 斌,谢东辉,丁 勇,李登华
(1.南京理工大学,江苏 南京 210094;2.宁波原水有限公司皎口水库分公司,浙江 宁波 315000;3.南京水利科学研究院,江苏 南京 210029)
0 引言
在混凝土结构表面的养护中,裂缝是最常见和严重的病害之一,是很多其他病害发生的早期特征[1]。如,严重的裂缝会恶化坝体结构的强度和稳定性,破坏坝体的完整性和抗渗性,加速混凝土的碳化和腐蚀,危及大坝的安全运行[2],因此对裂缝的鉴定和监测是结构检验、危险系数评估的重要内容。目前,水库坝体和廊道混凝土裂缝常常需要人工进行检测[3],但传统的人工检测裂缝巡检方法通常很耗时,而且容易由于检验员疲劳或人为错误而导致不准确[4],致使裂缝检测的效率和成本已完全无法满足未来庞大的检测任务要求。
现如今计算机在土木工程中的应用越来越广泛,特别是基于图像处理的非接触式病害检测技术已成为国内外学者广泛研究的对象。该类技术拥有非接触、处理精度高、灵活便捷的特点,采用数字图像处理技术进行裂缝检测已在裂缝提取领域取得显著成果:石帅等[5]对比使用了 4 种图像分割算法,发现 OTSU 算法可以有效地从背景中提取出裂缝;吴玉龙等[6]提出利用圆形填充裂缝,可以从提取后的裂缝图像中计算出裂缝像素宽度。
基于人工智能检测识别裂缝的方法虽然已取得较多成果,如李刚等[7]提出一种基于 NB-FCN 算法的裂缝提取算法,毛莺池等[8]提出一种基于 Faster R-CNN 的多任务增强裂缝图像检测方法,但基于人工智能检测的技术手段往往存在复杂条件下识别效果不佳、训练时间长等缺点。
同时,由于对裂缝观测模式的固定化思维,导致基于图像处理的裂缝检测技术仍然处于无法宏观描述裂缝开展量的局限中。以往学者所研究的此类技术大部分都专注于利用一种方法通过裂缝形态和图像直接测得某一点或某一段的宽度和长度,存在分析速度慢、计算方式不统一、复杂条件下裂缝识别困难的缺陷。
针对此,提出一种新的基于图像处理的混凝土裂缝宽度变化测量方法(以下简称“图像法”),该方法通过观测位于裂缝两侧的标识物变化进而观测裂缝的变化。本文对该方法测量精度进行了室内模拟试验,并通过对皎口水库大坝结构裂缝的实际测量,验证了该方法在大型土木结构裂缝变化测量的可行性。
1 裂缝宽度变化测量原理和流程
裂缝体现了结构的不连续,裂缝两侧的结构位移是裂缝开展的宏观因素。裂缝检测的本质是测量裂缝两侧墙体之间的距离,即裂缝宽度[9]。因此对于识别难度高的裂缝,可以直接测量裂缝两侧结构位移的变化量,而不是宽度的绝对值。将裂缝量测的结构视为 2 个刚体,则存在以下变化:当 2 个刚体发生横向位移,将导致 2 个刚体间形成的裂缝在宽度方向上开展;当 2 个刚体发生纵向位移,表现在裂缝发展中即为裂缝的纵向错动;若 2 个刚体发生相对旋转,裂缝也会随之产生不均匀的开展。
图像法裂缝宽度变化测量原理如下:由于格型标定模板制作简单,精度也满足要求,所以广泛应用于机器视觉测量系统中[10],故利用棋盘格作为首要标识物进行图像特征点定位和检测,利用二维码的信息存储和识别点易于寻找的特点,选用二维码作为次要标识物。刚体位移和标识物示意图如图 1 所示,图中,左侧棋盘和右侧二维码均为人工粘贴于裂缝两侧的标识物,基本尺寸信息均为已知固定值。利用棋盘格角点生长检测算法[11]识别角点,并在左侧棋盘建立图像坐标系。

图1 刚体位移、标识物、坐标系示意图
由于像素点坐标均是以图像(1,1)像素点作为原点生成坐标系的坐标,故需要进行坐标系的转换。平面坐标系的转换一般有平移、旋转和拉伸 3 种形式[12]。由于该坐标系无拉伸变化,只有平移和少量旋转变化,设图像原坐标系为基坐标系,设棋盘格坐标系为目标坐标系,则基系坐标(x′,y′)可通过公式(1)(2)映射到目标坐标系(x,y)[13]。

式中:θ为基坐标系与目标坐标系的旋转角度;a与b为目标坐标系与基坐标系坐标原点的横向和纵向位移。
经过坐标系转换后,还需对图像进行标定,确定像素单位与实际长度单位的换算关系,本方法选用标尺法进行图像标定。标尺法指当成像平面与物体所在平面平行时,在物体平面放置 1 个已知实际长度和大小的物体作为靶标,按式(3)计算标定比例k。
在第 1 次拍摄结束后,对图像进行坐标系转换和标定,计算得到二维码角点初始坐标值(x1,y1),该坐标值单位为 mm。
经过一定的时间后,裂缝可能会有开展,此时进行图像的第 2 次拍摄和处理,得到新的二维码坐标(x2,y2)。将前后 2 次二维码角点坐标按位置分别对应做差,取二维码 3 个角点的坐标差值(Δx,Δy)作为刚体平移量。
图像法裂缝宽度变化检测具体流程如图 2 所示。
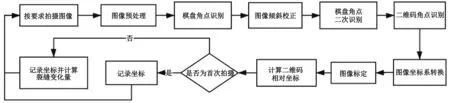
图2 裂缝宽度变化检测流程图
2 裂缝宽度变化测量室内模拟试验
图像法裂缝宽度变化测量室内模拟试验,旨在通过模拟理想状态下裂缝的开展和图像的拍摄条件,进行多次反复试验,以证明图像法的有效性和理论准确性。
2.1 试验器材及装置设计
本试验的器材有:光轴直线导轨滑块模组,百分表 2 个,百分表支架 2 个,塑料泡沫 2 片,手机支架 1 个。通过控制光轴直线导轨滑块的移动,可以控制 2 个物体相互位移的距离;通过与百分表的组合使用,可得出 2 个物体相互位移的具体值。装置整体设计如下。
1)将激光打印的二维码和棋盘分别粘贴于塑料泡沫板上。
2)将组装完成的导轨滑块模组置于桌面,使其长边平行于桌面边缘。
3)将棋盘和二维码泡沫塑料分别固定于滑块和滑块模组起点处,使二维码顶点对角线与棋盘中间纵轴位于同一条直线上,并使二维码和棋盘边缘均与滑台模组边缘平行。
4)将百分表用支座固定在桌面边缘,2 个百分表顶针分别顶住滑块左、右侧表面,转动转轴,若百分表右侧增加值等于左侧减少值,则说明百分表与滑台平行,百分表增加或减少值即为滑块移动值。
5)固定手机支架,并根据试验分组使手机拍摄距离固定在较远或较近距离。
室内模拟试验图如图 3 所示。
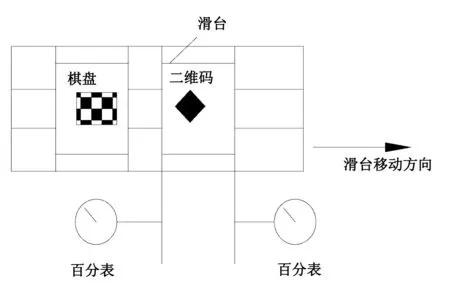
图3 室内模拟试验图
2.2 试验过程
将试验分为 A、B 两组,使 A 组试验拍摄距离固定在 15 cm 左右,B 组试验拍摄距离固定在 25 cm 左右。分组试验时,首先拍摄第 1 张图像,经过处理后得到二维码角点初始坐标,记为(x,y),将载有棋盘的滑台每次朝远离棋盘方向横向移动 0.2 mm,共移动 25 次,拍摄图像 25 张,经处理后得到 25 组新二维码角点坐标,则新角点坐标的真实值分别为(x+0.2,y),(x+0.4,y),(x+0.6,y),…,(x+5.0,y)。新角点横坐标位移变化即裂缝宽度变化真实值,分别为 0.2,0.4,0.6,…,5.0 mm。
2.3 试验结果分析
根据试验结果,以测量次数为x轴,以裂缝变化为y轴,如图 4、5 所示。

图4 室内模拟试验 A 组结果
试验结果说明:误差较大值为 0.178 m m 和0.16 8 m m,分别在 B 组试验真实值为 1.8 m m和 1.0 mm 处出现。由图 5 可知:2 个误差较大值前后误差均较小,且测量值与真实值变化趋势相同。将 1.8 mm和 1.0 mm 处试验拍摄的图像放大,放大后的部分图像如图 6 所示,分析发现这 2 处所拍摄的图像二维码角点处均有较大程度的模糊,可判断误差来源为拍摄图像时的人为误差。
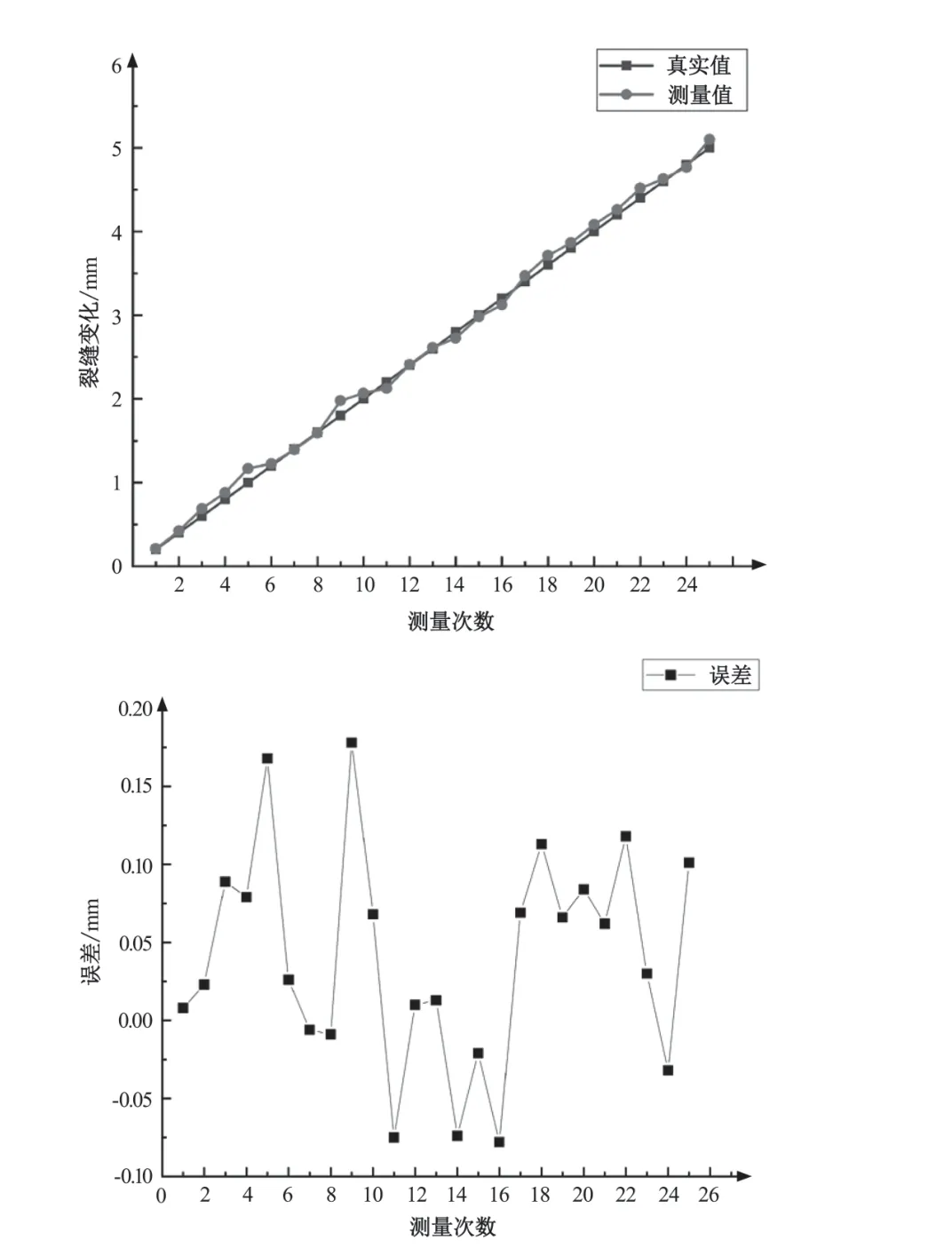
图5 室内模拟试验 B 组结果
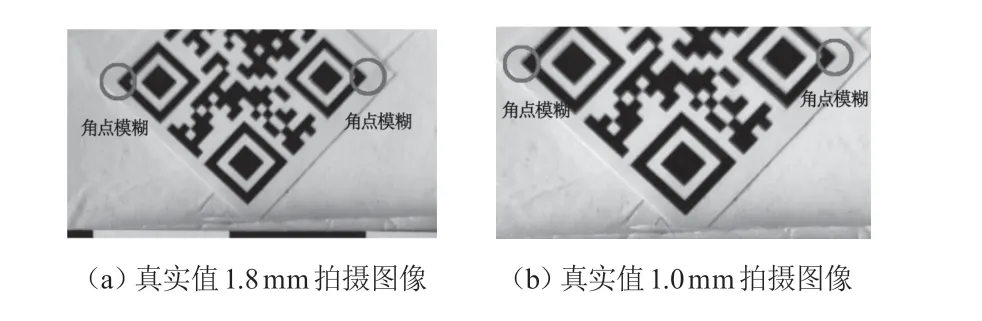
图6 室内试验误差较大的拍摄图像
A组试验误差最小值为 0.0 04 m m,在真实值为 3.6 mm 处出现,最大误差值为-0.088 mm,在真实值为 3.2 mm 处出现,绝对误差平均值为 0.031 mm。B 组试验误差最小值为-0.006 mm,在真实值为 1.4 mm 处出现,绝对误差平均值为 0.064 mm。对比 2 组试验,其绝对和相对误差均在真实增长值 1.0 mm 前较大,在 1.0 mm 后较小,但 B 组试验各项误差指标均略大于 A 组,这是由于 B 拍摄距离大于 A 组,导致其标定比例也较大,误差也相对较大。同时,由于 B 组拍摄距离较远,镜头轻微晃动导致的模糊程度也将大于 A 组,这对于棋盘格和二维码角点识别精度会带来一定程度的影响。水利工程裂缝检测精度要求暂未查询到相关规范,若以房屋裂缝检测标准规范[14]验证,裂缝宽度检测精度不应< 0.1 mm,本方法精度达到使用标准。
经室内模拟试验可证明该方法在理想状态下的准确性是较高的,反映了本方法的正确性,为进一步测试本方法的实用性能,需要进行现场试验。
3 裂缝宽度变化测量现场试验
裂缝宽度变化测量现场试验的试验场景为皎口水库的裂缝巡检。皎口水库(规划期称长里方水库),位于奉化江支流鄞江上游大小两皎溪流的汇合处密岩村附近,是以防洪灌溉为主,结合发电、养鱼、城市供水等综合利用的大二型水库。
3.1 装置安装和测量方法
在水库坝体 2 处不同的结构裂缝处分别设置测点 1 和 2,试验时间为 2020 年 6 月 22 日-9 月 11 日。
在首次巡检时,首先将选定测点两侧的灰尘、泥沙等污渍去除,然后将特制的二维码及棋盘钢片粘贴于坝体裂缝两侧,并在二维码和棋盘两侧放置自动距离测量装置。按要求拍摄图像后,利用自动距离测量装置测量距离并记录,回到试验室后利用拍摄的图像测得两侧钢片的距离并记录。在其后每次巡检时均拍摄图像并进行自动测量,拍摄的图像共 24 张。
分别记录下每次由自动装置和图像法测量的宽度,两者测量的宽度由于装置安装方式不同无法直接进行比较。因此,将自动测距装置及图像法测量得到的宽度记为绝对宽度,再将绝对宽度后一次测量与前一次测量依次相减计算得到的值记录为裂缝宽度变化量,由自动测距装置测量和计算得到的试验结果记为真实值,由图像法测量和计算得到的结果记为测量值。
3.2 测量数据及分析
裂缝宽度变化测量现场试验计算所得的裂缝变化量数据如图 7 所示。

图7 现场试验裂缝变化量
通过计算每次测量与前次测量 2 个方向的开展或收缩宽度,并对比图像x,y向与自动装置测量的结果可知,误差均在 0.1 mm 以内,出现的较大误差为 0.083 和0.073 mm,为测点 2 的 7 月 20 日试验y向和 7 月 29 日试验x向,拍摄的图像如图 8 所示(有裁剪)。

图8 测点 2 误差较大的拍摄图像
根据图像拍摄角度和倾斜校正矩阵可发现7 月 20 日拍摄图像在y轴方向即纵向方向倾斜较为严重,其y轴校正矩阵数值也较大,导致测量结果在y轴方向上误差较大;而 7 月 29 日图像在x和y方向上倾斜均较严重,导致其结果在x和y方向上误差均较大。而测点 1 图像由于拍摄角度较为平行于结构面,因此测量误差均较小。由于误差均在 0.1 mm 以内,测点 1 的x和y向平均误差分别为 0.026 和 0.018 mm,测点 2 的x向和y向误差分别为 0.030 mm 和 0.041 mm,整体平均误差为 0.029 mm,属于可接受范围内,整体基本符合检测精度要求。
4 结语
开发的基于图像处理的裂缝宽度变化测量方法,对拍摄的带有标识物的图像进行裂缝的开展计算,并进行了室外试验,试验结果表明:本方法是有效的,且具有一定的精度,虽然现场环境恶劣,图像拍摄质量较差,装置损坏严重,导致多处测点无法使用,但在有效测量的测点中,结果较好,验证了本方法有一定的实用性。
针对现阶段测量现场部分测点无法使用的情况,在后续开发中应重视图像预处理算法更新和装置的维护措施。另外,由于测量现场雨水丰富,标识上有大量雨渍,使图像中标识物角点在水滴下发生形变,也影响了测量的精度。经过总结发现基于图像处理的裂缝宽度变化测量方法,测量结果误差来源主要有以下 4 个方面:①拍摄角度过于倾斜;②拍摄距离较远;③标识物污染;④标识物角点模糊。
因此后续的开发过程中,需要在以下 3 个方面进行改进:①亟待开发一种能稳定手机拍摄位置和角度的支架,使每次拍摄的图像中的标识物都处于图像的同一位置,可极大减少误差;②需要进一步优化对现场图像预处理的算法,使在较差光源、背景下拍摄的图像仍具有可识别性;③需进一步优化标识物设计,改进算法效率,提高检测速度。Q
猜你喜欢
导航定位学报(2022年2期)2022-04-11
计算机仿真(2021年8期)2021-11-17
计算机系统应用(2020年1期)2020-01-15
电子技术与软件工程(2019年9期)2019-07-12
电子技术与软件工程(2018年10期)2018-07-16
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
人生十六七(2015年5期)2015-02-28
销售与市场·管理版(2009年21期)2009-09-03
