基于多角度特征提取的舵机故障诊断方法
2022-09-21 00:34王娜,李杨,彭锟
东北大学学报(自然科学版) 2022年9期
王 娜, 李 杨, 彭 锟
(1. 天津工业大学 控制科学与工程学院, 天津 300387; 2. 天津市电气装备智能控制重点实验室, 天津 300387)
舵机作为控制系统的执行机构,常用于对空导弹、无人飞行器、制导炮弹等领域[1].若舵机发生故障,将会造成严重损失,导弹不能按照制导指令飞向目标,甚至造成控制系统失控、失控导弹威胁载机等重大安全事故,为此对舵机进行准确故障诊断,以排除后续的飞行安全隐患[2].舵机故障包括舵面卡死、舵机电机绕组开路等严重却容易诊断的故障,包括机械磨损、参数漂移等引起的舵机抖动,其影响舵机的正常工作状态但却难以直接诊断故障[3].
目前舵机的故障诊断方法一般分为基于模型和数据驱动两种.模型法需要获取精确参数,计算复杂度较高[4-5].基于数据驱动的方法不需要求取舵机内部部件的精确特性和先验专家知识,仅通过对离线的历史数据和在线的实时数据进行挖掘,提取出隐含在数据中的有用信息即可进行故障诊断[6-8],简单有效,适用于复杂多变的实际舵机运行环境.
传统数据驱动方法,如卷积神经网络等[9],选择输入变量时一般采用主元分析法.将待辨识数据的频率、峰值等信息作为网络的输入,这些信息易于获得,但却难以准确反映舵机数据的本质.例如舵机中的电流和位置数据一般具有较丰富的非线性和时变性,抖动故障往往蕴含于其中.若采用传统降维方法获得输入变量,很可能难以准确捕捉数据中重要的动态信息,导致所选的输入变量显著性不强,进而影响后续故障诊断的准确性.考虑数据间时变性的影响,以双向长短时记忆(bidirectional long-short term memory,BLSTM)循环神经网络[10]为典型代表,但其本身结构过于复杂,在处理高维数据时,学习参数多且学习速度慢,因此需要在应用BLSTM前进行数据维数的约简,以便BLSTM进行输入特征的有效提取.
综上所述,本文提出一种基于多角度特征提取(multiple angle feature extraction, MAFE)的舵机故障诊断方法,采用短时分析法[11]分帧舵机数据.应用能熵比[12]对帧内电流信号提取特征,以增大原始数据中微小抖动的特征.应用动态时间规整[13](dynamic time warping,DTW)特征提取方法提取帧内位置信号的特征,以深入挖掘位置指令与位置反馈数据的相关性.在此基础上,形成舵机的多角度特征,不仅减少了特征提取的计算量,而且为后续的BLSTM分类提供了有效输入,从而提高了舵机数据分类的正确率.将基于MAFE形成的特征作为BLSTM循环神经网络的输入,有效实现对舵机数据的故障分类,并与传统LSTM及BLSTM方法相比,验证了所提方法的有效性.
1 舵机故障的描述
舵机作为执行器,是由占空比可调的脉冲进行控制,舵机控制系统的基本原理如图1所示.当控制器接收到位置指令时,由电机带动转臂,此时检测电流值作为电流反馈,经过传动机构形成角度输出,并给出位置反馈.
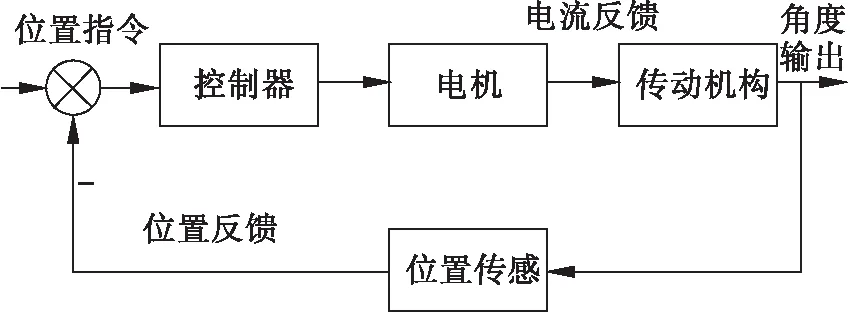
图1 舵机控制系统的基本原理Fig.1 Basic principle of the actuator control system
舵机抖动主要来源于电机转子和定子的故障,其中转子失磁导致输出力矩减小、电流反馈偏小.转子偏心导致舵机抖动,电流反馈和位置反馈不稳定.定子匝间短路导致三相电流显著上升,系统出现较大震荡,导致舵机抖动.
舵机的故障首先体现于电流信号,因电流作为控制系统的过程量,能更精确地反映当前舵机的工作状态.通过不同的电流反馈,体现出舵机不同的内部位置,当舵机由于磨损等原因将要出现抖动趋势时,通常会在电流反馈的某一个或某几个电流反馈中出现异常波动,主要体现在波动频率更高、幅值激增、尖峰脉冲持续时间增加等,因此对电流反馈的监测有利于预先发现故障.故障也体现于位置信号,位置指令和位置反馈作为控制系统的输入和输出,能够更加明显判定舵机是否故障.当舵机受到到外部干扰或突发故障导致抖动时,从位置数据上能明显体现出舵机位置反馈无法跟随位置指令,主要体现在位置反馈不跟随位置输入、位置反馈超调过大或位置反馈无法稳定等.
本文使用的舵机数据为某型舵机的实测数据.舵机测试在常温常压的条件下,输入阶跃信号,使舵机每次转动2°~15°,期间以5 ms的采样间隔采集位置反馈数据和电流反馈数据,其中电流数据采集自舵机中三相270 V直流无刷电机的U,V两相.舵机数据的具体采集方式为:在使用某舵机前,会对该舵机进行测试检查,如果舵机无法转动或出现其他严重故障,则直接换下一个舵机进行测试,不进行接下来的数据采集和波形检查;若舵机可以转动且无明显故障,则以5 ms的采样间隔采集舵机数据,其中包括10个反馈点的电流反馈A=[a1,…,a10],以及2个反馈点的位置信号B=[b1,b2],其中位置指令数据为b1,位置反馈数据为b2,人工检查波形图,校对波形是否正常,若正常则投入使用,否则更换舵机继续检查.由于在数据采集的过程中已经预先排除舵机卡死、摇臂不动等严重故障,因此该实验数据仅包括正常舵机数据和舵机抖动数据.利用电流反馈数据A及位置数据B诊断舵机是否故障.
2 基于多角度特征提取的舵机数据故障诊断方法
2.1 多角度特征提取的基本原理

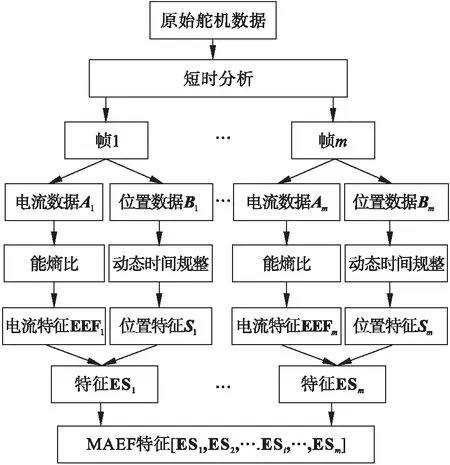
图2 MAFE的基本原理Fig.2 Basic principle of MAFE
m=(N-l1)/l2+1 .
(1)
式中:N为舵机数据的总采样点数;l1为帧长;l2为帧移.
2.1.1 基于短时分析的舵机数据分帧
短时分析是将信号分成小段来分析其蕴含的动态特征,每小段信号即为1“帧”.虽然舵机电流信号在整个阶段表现为非稳态、时变的特性,但其在很短的时间范围内特征变化较小、信号稳定,即具有短时平稳性,将整个信号拆分成多个连续的短时间段来处理[11],即分帧.实际操作中分帧即利用舵机数据信号乘以一个有限长的窗函数[14].窗函数如式(2),式(3)所示.
汉明窗:

(2)
矩形窗:
(3)
对舵机位置数据选用式(3)所示帧长为l1的矩形窗分帧,舵机位置数据为阶跃信号,矩形窗能保留原始信号的趋势.对于舵机电流数据,选用式(2)所示帧长为l1的汉明窗分帧,汉明窗能减小因电流数据时域信号截断而产生频谱泄露[15].

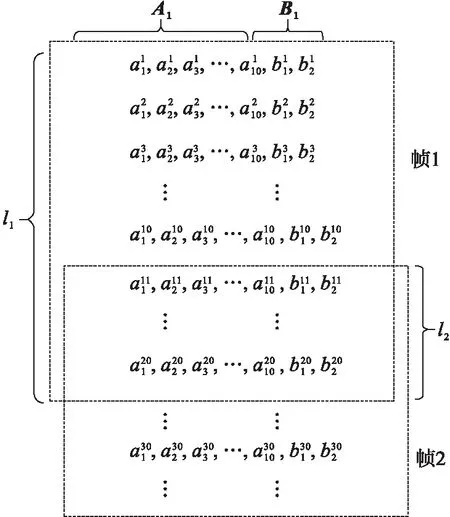
图3 舵机数据的分帧过程Fig.3 Process of separating frame for actuator data
舵机数据分帧过程中帧长l1取20,帧移l2取10的原因是:对于采集的该型号舵机样本数据,在位置指令下达后,舵机内的驱动电机快速启动,响应位置指令,在其间的电流会有相应变化,位置处于动态调整之中,这个过程会由位置角度调整的大小不同,而有不同的持续时间,当指令执行完成后,舵机重新回到稳定状态.对于正常舵机,变化较为平稳,持续时间一般在40~90 ms,数据的采集间隔为5 ms.为了使该变化过程能完全处于某个窗函数中,以至于能完整采集该变化过程并作为后续的特征,选定100 ms数据为1帧,即帧长l1为20.为实现帧与帧之间的平滑过渡,帧移一般为帧长的25%~50%,故本文取帧移l2为10,即在分帧时使相邻帧存在50%的数据重复.
2.1.2 基于能熵比的舵机电流数据特征提取
由于舵机抖动故障表现为非线性、存在噪声、包含冗余信息的电流数据.为了将舵机抖动特征完全从电流中提取,引入能熵比.能熵比能够有效增强信号中的微小冲击,提高信号信噪比[16].以能熵比提取的特征代替电流帧数据,提高舵机电流抖动数据区分度的同时又降低了数据量,加快后续神经网络的训练和故障判别.
第j帧的电流反馈数据为


(4)

(5)
(6)

(7)
(8)
(9)
式(9)中fk由式(10)和式(11)的快速傅里叶变换式得到:
(10)
(11)
2.1.3 基于动态时间规整的舵机位置特征提取
舵机位置数据分为舵机位置指令和舵机位置反馈,位置反馈跟随位置指令.为了从位置关系上挖掘抖动故障,引入DTW[17].DTW是基于相似度的测量方法,通过弯曲时间轴来匹配和映射时间序列形态方式,能测量不同长度时间序列的相似度[18].引入DTW是由于其对舵机位置反馈跟随位置指令的轻微滞后不敏感,因此相对于计算2个数据对的欧氏距离,DTW可以更准确地实现数据间相似性的比较.
分析舵机位置数据,正常舵机在位置指令下达5~15 ms后,开始快速跟随指令信号进行单调递增或递减,整个跟随过程的消耗时间与当前舵机的实际位置和目标位置有关.当位置指令为阶跃信号时,跟随曲线可近似看作一段短时间滞后的阶跃响应.对于存在抖动现象的故障舵机,位置指令下达后,位置反馈可能出现长时间高频率振荡、跟随结果存在静差、瞬时反应出现尖峰值等现象,导致跟随过程总耗时延长,甚至无法完成跟随.抖动舵机的跟随过程难以有效拟合位置指令曲线,即使采用DTW对位置数据进行全局或局部变形,也不能使位置反馈曲线很好地跟随位置指令曲线,因此在故障舵机下计算出的这2个时间序列的距离将大于正常舵机计算出来的距离,出现较大误差.
(12)
式中,cl1,l1的值是DTW的输出.
2.1.4 基于多角度特征提取的舵机特征提取算法
基于MAFE的舵机特征提取算法描述如下:


步骤4 如舵机样本中帧xj不为最后一帧xm,则j=j+1并返回步骤 2,否则输出m个特征样本数据ES=[ES1,ES2,…,ESm].
2.2 基于双向长短时记忆网络的舵机故障诊断
2.2.1 LSTM模型
LSTM基本记忆单元结构如图4所示,循环神经网络LSTM主要包括遗忘门、输入门、输出门,使其能够更有效处理时间序列数据[19-20].
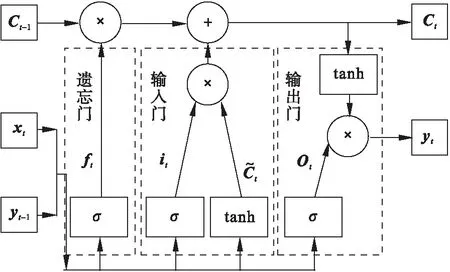
图4 LSTM基本记忆单元结构Fig.4 Basic memory cell structure of LSTM
LSTM基本记忆单元是分层递阶结构,当前t时刻输入xt与t-1时刻的输出yt-1,经过遗忘门和输入门进而影响t-1时刻的单元状态Ct-1,而后全部输入到输出门并得到当前输出yt.
LSTM的计算过程如式(13)~式(18)所示.xt为当前时刻t的输入变量,yt-1为t-1时刻的输出变量.
遗忘门的输入为[xt,yt-1],输出为ft,其决定t-1时刻的单元状态Ct-1是否应该被遗忘:
ft=σ(Wf·[xt,yt-1]+bf) .
(13)
式中:Wf,bf分别为遗忘门的权重和偏差;σ为sigmoid函数.
输入门的输入为[xt,yt-1],输出为it,控制在t时刻单元状态Ct是否应该被xt更新:
it=σ(Wi·[xt,yt-1]+bi) .
(14)
式中:Wi,bi分别为输入门的权重和偏差.
输出门首先输入[xt,yt-1],确定需要加入的单元状态的新信息Ot:
Ot=σ(Wo·[xt,yt-1]+bo) .
(15)
式中:Wo,bo为输出门的权重和偏差.
当前时刻的单元状态:
(16)
式中,⊙为Hadamard积算子.
当前输入的单元状态由上次的输出和本次输入共同决定:
(17)
式中:Wc,bc为单元状态的权重和偏差.
当前时刻的输出yt:
yt=Ot⊙tanh(Ct) .
(18)
2.2.2 MAFE-BLSTM模型
BLSTM是LSTM神经网络的改进,继承了LSTM的优点,即依靠遗忘门、输入门和输出门的组合,实现将舵机时序中冗余数据遗忘.BLSTM能够在正反两个时间方向的信息同时运算,解决了LSTM无法处理后文信息的问题[21].对于舵机数据,BLSTM能够处理后文信息,便于网络学习到数据未来的变化趋势.
为分离出舵机抖动故障,将MAFE与BLSTM循环神经网络相结合,形成MAFE-BLSTM模型,从而提出基于MAFE-BLSTM的舵机故障诊断方法.BLSTM在该舵机故障诊断模型中实现数据分类,如图5所示.利用舵机历史数据和未来数据正反两个方向的信息,提高模型的故障诊断精度.
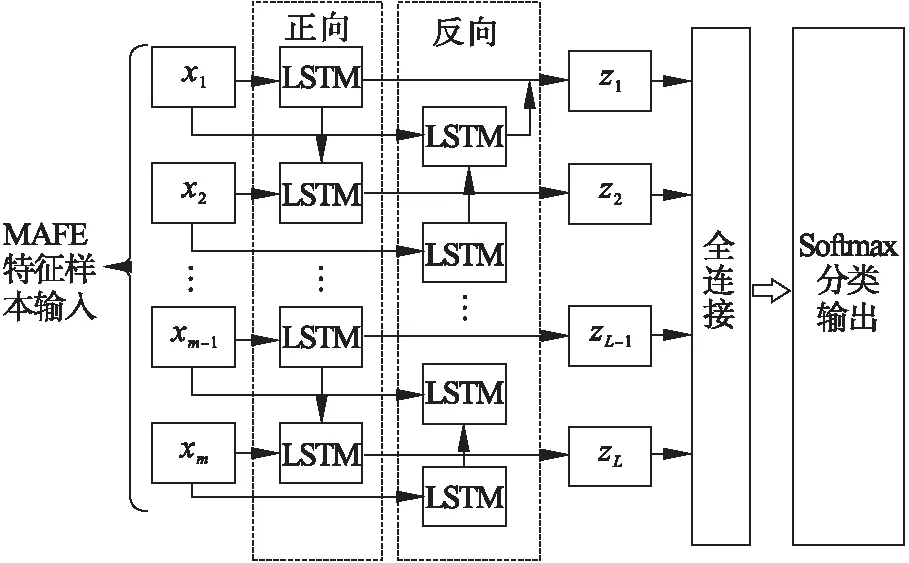
图5 BLSTM网络的基本结构Fig.5 The basic structure of BLSTM network

(19)
(20)
(21)
其中:w,v,u为不同的权重;b,c为偏差.
基于MAFE的舵机故障诊断过程如图6所示.首先进行数据预处理,对实时采集的舵机数据采用滑动窗口取出样本集,作为MAFE-BLSTM模型输入;利用MAFE对此样本集进行特征提取,即短时分析划分数据、能熵比提取电流特征和DTW提取位置特征,将原始数据集转换为MAFE特征样本集.用MAFE特征样本作为输入,提供给BLSTM神经网络进行训练,得到最终的故障分类.
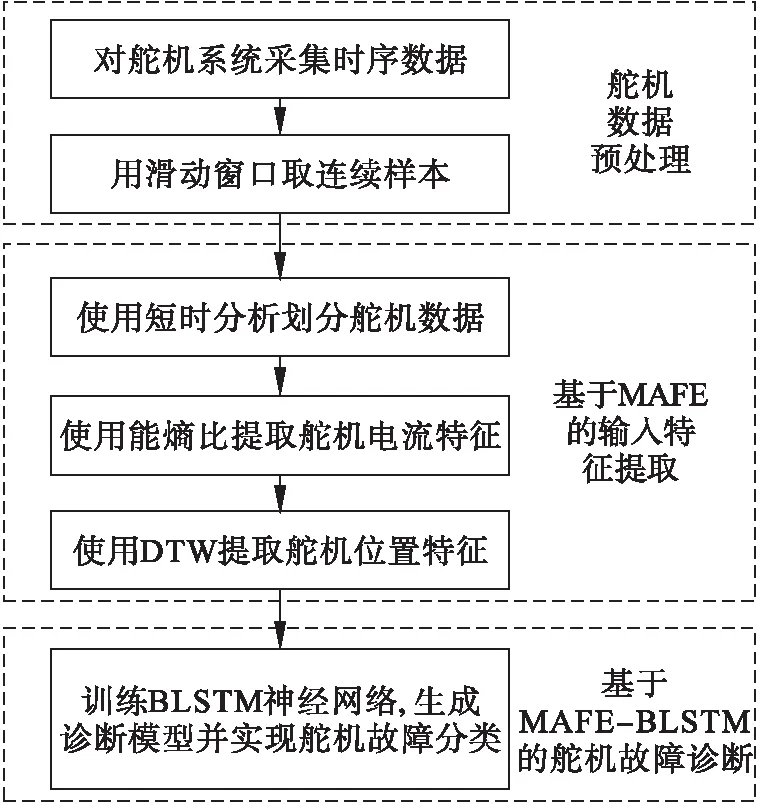
图6 基于MAFE-BLSTM的舵机故障诊断模型Fig.6 Model of actuator fault diagnosis via MAFE-BLSTM
3 仿真研究
采用第1节中的舵机故障数据,采样间隔为5 ms.采集到某型舵机的原始数据17组,其分布如表1所示,其中每个采样点包括位置指令、位置反馈、电流反馈1~10共12维输入,数据的类型包括舵机抖动故障数据和正常数据.
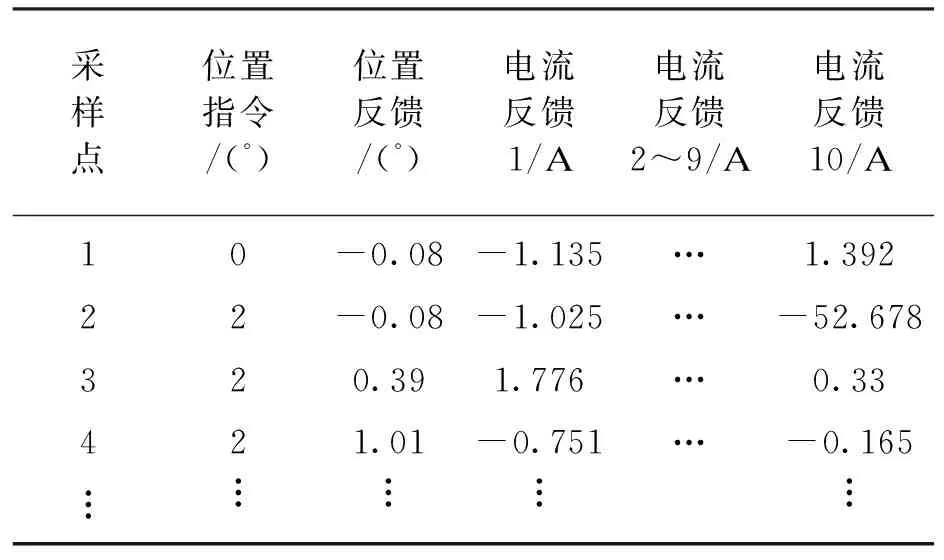
表1 舵机数据分布Table 1 Actuator data distribution
由于舵机数据随时间连续产生,为保证样本平滑过渡且能连续监测,采用滑动窗口法采集数据.选取2 000个采样点,将其作为一个诊断数据集,向后滑动100个时间点再次采样,形成新诊断数据集,以此类推,形成舵机总数据集.在后续仿真阶段,数据进行随机重组,以保证所获得的数据集更具有代表性,最终得到600个正常数据集和600个抖动数据集,如表2所示.
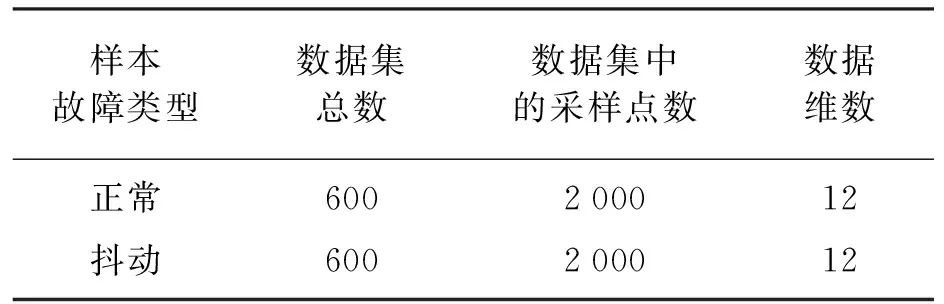
表2 舵机的数据集属性描述Table 2 Data set attribute description of actuator
首先验证所用位置反馈、电流反馈对抖动的敏感性及相互关系,再验证所提方法的有效性.
位置变化是舵机抖动最直观的反应,也是相对简单、快速的故障诊断方法,如图7所示.某故障舵机测试得到的2 000个位置数据能够明显看出在第20个、第530个和第1 480个采样点附近产生了舵机抖动,但位置反馈数据对抖动的敏感性仅在位置指令突变时较强,而位置指令保持不变时仅从位置数据难以判断此舵机是否故障,具有局限性.
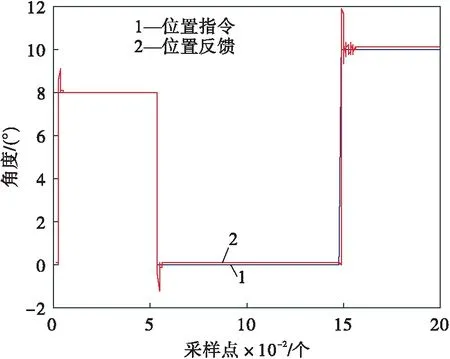
图7 故障舵机位置数据Fig.7 Position data of faulty actuator
引入电流反馈克服位置反馈的局限性如图8所示.故障舵机在前500个采样点的电流反馈与正常舵机500个采样点的电流反馈对比可知,电流反馈不仅在第20个采样点将舵机的抖动体现出来,而且在第20个采样点之后,位置指令保持不变时,也能够体现出故障,故障具体表现为电流波动频率更高、峰峰值更大、平均幅值与正常水平相异等.引入电流数据诊断故障虽然不如位置数据直观、快速和简单,但电流对舵机抖动有更高的敏感性,因此将电流数据作为位置数据的补充,有利于提高故障诊断精度.
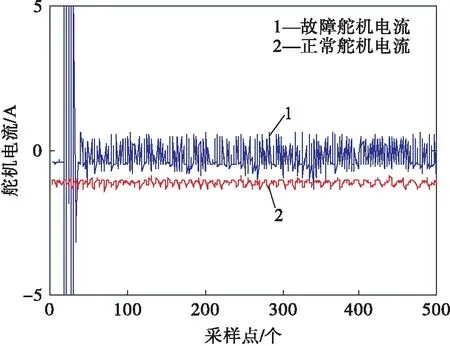
图8 电流反馈对比Fig.8 Comparison of current feedback
利用MAFE对原始信号进行特征提取,提高其显著性并减少训练的数据量.利用MAFE-BLSTM模型对舵机抖动情况进行故障诊断,验证MAFE对电流的特征提取.从表1的原始数据中随机抽出正常样本和抖动样本各7 500个时间上连续的电流样本点如图9所示.
由图9可知,在原始电流信号中,前50%采样点为正常舵机电流,后50%采样点为抖动舵机电流.原始电流的反馈信号为非线性信号,充满尖峰电流脉冲,难以区分舵机是否处于抖动故障中.
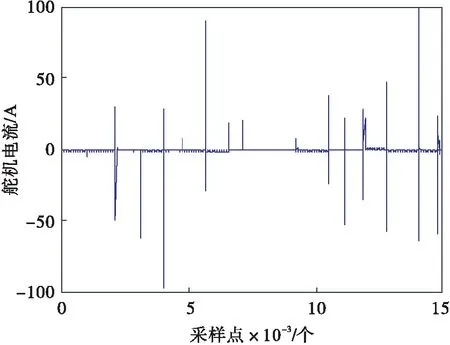
图9 原始舵机电流反馈信号Fig.9 Feedback signals of original actuator current
利用MAFE提取电流特征如图10所示.本方法减少数据量时抖动特征突显,从提取出的MAFE特征可知抖动舵机电流信号峰峰值更大、平均幅值与正常水平相异.这些突显出的特征都将提高最终故障诊断的速度与准确性.
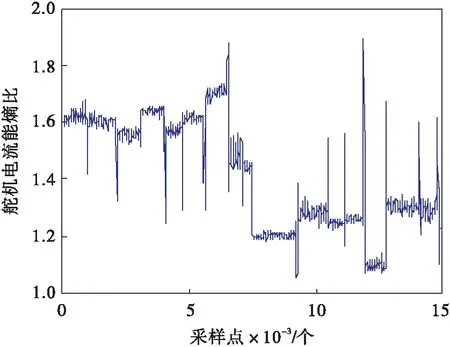
图10 利用MAFE提取电流特征Fig.10 Extracting current features via MAFE
采用MAFE对位置信号提取特征,舵机要求位置反馈跟随位置指令,否则即为抖动.从表1随机取出一段样本,样本的15 516个连续的时间上含有抖动的部分,舵机位置指令与位置反馈信号的采样如图11所示.
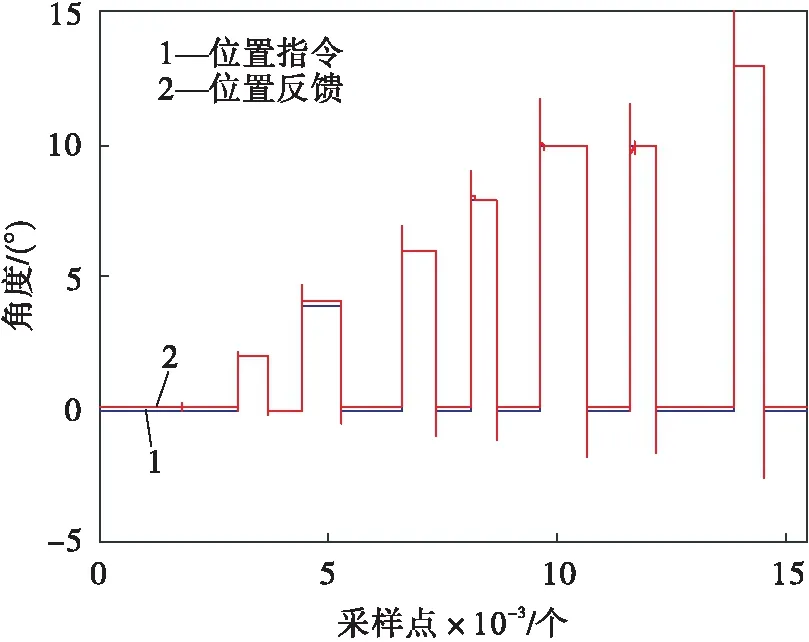
图11 原始舵机的位置指令与位置反馈信号Fig.11 Position command signal and position feedback signal of original actuator
通过MAFE对位置信号特征提取,将两组数据融合,得到位置特征,采用幅值指标对这两组数据进行对比,如图12所示.幅值越大说明偏离程度越大,抖动的可能性越大,从而突出显示抖动特征并加快故障识别.
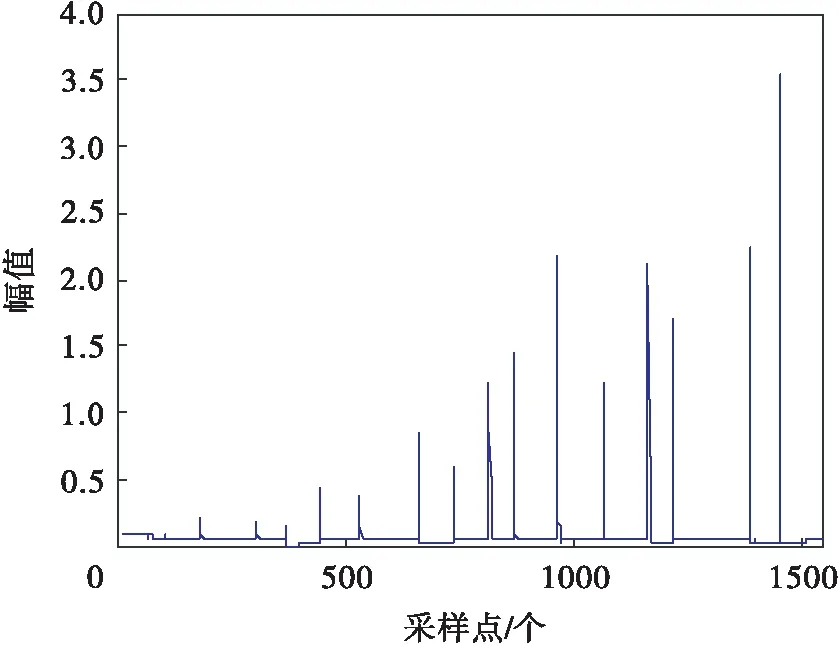
图12 利用MAFE提取位置特征Fig.12 Extracting location features via MAFE
原始样本与MAFE特征样本数据对比如表3所示,使用MAFE对数据特征提取,原始样本数据总和为100%,则MAFE特征提取后,数据个数仅为原来的9.12%,数据量降低90.88%,提取特征信息的同时降低了数据量,因此运算复杂性显著降低.
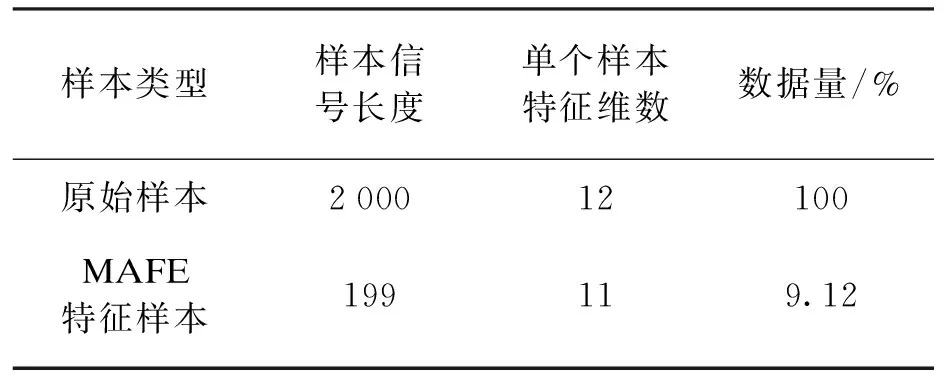
表3 原始数据与MAFE特征提取后对比Table 3 Comparison of original data and MAFE feature extraction
在上述特征提取基础上,利用MAFE-BLSTM故障诊断模型进行故障诊断.过程如下:BLSTM隐藏层节点数为100,全连接层神经元2个,最小更新批量设为16,优化器采用Adam,损失函数取交叉熵函数:
(22)

将表2所示全部正常和抖动数据集用于仿真,取其中的70%用于训练,30%用于测试,对LSTM,BLSTM和MAFE-BLSTM训练110 min,得到测试精度如图13所示.
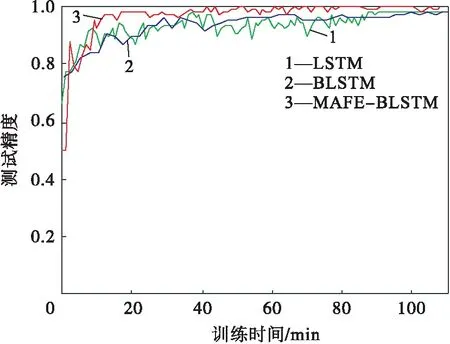
图13 LSTM,BLSTM和MAFE-BLSTM模型的测试 精度比较Fig.13 Comparison of test accuracy for LSTM, BLSTM and MAFE-BLSTM
在图13中,MAFE-BLSTM与LSTM和BLSTM相比,其整体测试精度明显上升,收敛时间比其他两种模型更短,训练20min时正确率为99.72%,而LSTM达到该正确率需要训练110 min.原因在于MAFE-BLSTM基于MAFE特征,而MAFE特征更突出数据中的异常信息,比原特征数目小,使相同时间内BLSTM神经网络学习更多样本,能在更短时间内将测试精度提高到95%以上.
对LSTM,BLSTM和MAFE-BLSTM训练110 min,得到损失值的曲线如图14所示.
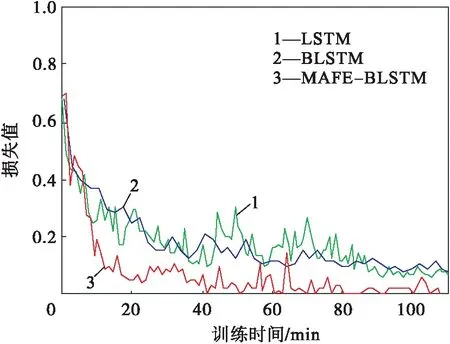
图14 LSTM,BLSTM和MAFE-BLSTM模型的测试 损失值比较Fig.14 Comparison of test loss value for LSTM, BLSTM and MAFE-BLSTM
在图14中,当MAFE-BLSTM模型训练到20 min时,损失值已达0.049;当LSTM训练到20 min时,损失值为0.29;BLSTM训练20 min时,损失值为0.24.在同一时刻,MAFE-BLSTM模型的损失值相比其他两种模型很小.当训练时间达到110 min时,MAFE-BLSTM的损失值为0.002 4,LSTM的损失值为0.067,BLSTM的损失值为0.076.由此可知,MAFE-BLSTM模型能够在较短时间内迅速收敛,具有较强的训练调节能力,计算效率较高.MAFE-BLSTM与其他诊断模型的整体训练精度及测试精度比较如表4所示.
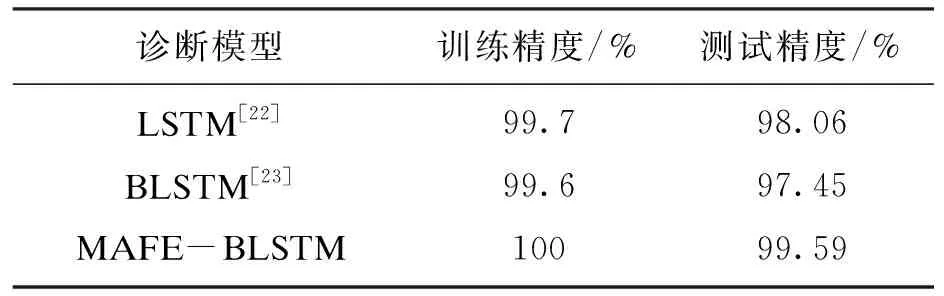
表4 MAFE-BLSTM模型与其他诊断模型的总体 训练及测试精度比较Table 4 Comparison of MAFE-BLSTM model with the accurate of other models for total train and test accuracy
MAFE-BLSTM模型在整个训练时间段内训练精度平稳上升,最终收敛于100%的高分类精度,高于LSTM的99.7%和BLSTM的99.6%.测试精度虽然略低于训练精度,但也达到99.59%的较高精度,高于LSTM的98.06%和BLSTM的97.45%,显示出模型的优越性.表5为不同测试时段下MAFE-BLSTM与其他模型的诊断精度比较.
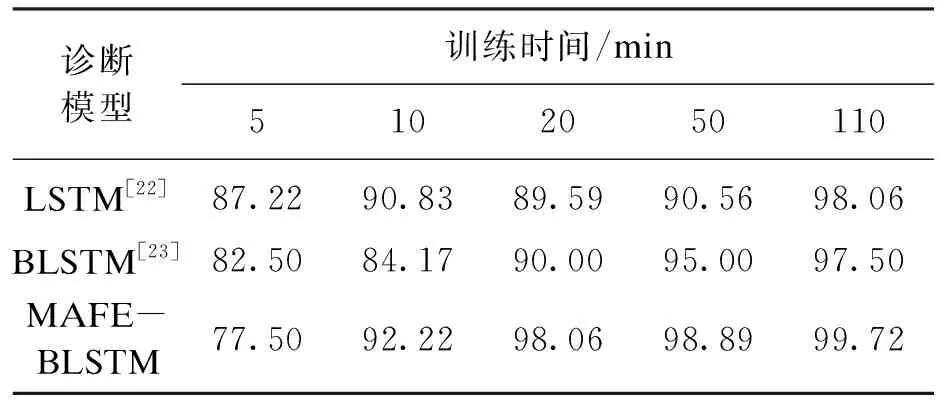
表5 MAFE-BLSTM模型与其他模型的诊断精度对比Table 5 Test diagnosis accuracy of MAFE-BLSTM model and other diagnosis models %
由表5可知,MAFE-BLSTM模型虽然在第5 min时略低于LSTM和BLSTM模型,但之后的10,20,50,100 min的训练过程中,其测试精度稳定上升,最终在110 min达到99.72%的较高正确率,分类效果优于LSTM和BLSTM,显示较好优越性.
表5精度变化的原因在于,MAFE-BLSTM模型的输入由MAFE特征获得,该特征在一定程度上突出了舵机数据中的抖动信息,提高了舵机特征提取的有效性.同时有个别类似抖动的扰动信息被同时突出,这会导致模型训练初期被这些个别异常点影响,产生测试精度的波动.由于MAFE-BLSTM模型中遗忘门的作用,模型具有一定的鲁棒性,使得这些极少数异常点的扰动仅能在模型训练初期产生影响,之后将被快速遗忘.在克服扰动后,由于MAFE特征比原数据特征的计算量小,能在更短时间将精度迅速提高.
4 结 论
1) 提出一种基于多角度特征提取的故障诊断方法,通过MAFE特征提取出舵机电流和位置数据的异常信息,能够显著降低原始数据量,提高整体算法的计算效率,并结合BLSTM加快故障诊断模型的训练速度,提高其诊断精度.
2) 仿真结果表明,MAFE-BLSTM故障诊断模型更适用于多维的长时间序列数据,并与LSTM,BLSTM神经网络的故障诊断结果比较,显示其在诊断精度和计算效率上具有较高优越性.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年2期)2022-03-08
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
电机与控制学报(2018年9期)2018-05-14
计算机应用(2016年10期)2017-05-12
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国信息技术教育(2014年5期)2014-03-17