
经腹膜外途径行单孔机器人辅助腹腔镜前列腺癌根治术的临床应用(附36例报告)
2022-09-20 09:22曲发军虞永江陈少军顾正勤崔心刚
腹腔镜外科杂志 2022年8期
曲发军,徐 丁,虞永江,陈少军,顾正勤,崔心刚
(上海交通大学医学院附属新华医院泌尿外科,上海,200092)
随着人们健康体检意识的提高及前列腺穿刺技术的改进,近年前列腺癌的检出率呈总体上升趋势,已成为威胁男性健康的主要肿瘤之一。对于局限性前列腺癌患者,根治性前列腺切除术仍是主要的治疗方式。如何更好地开展前列腺癌根治术,一直是泌尿外科学界关注的问题。随着机器人腹腔镜前列腺癌根治手术的开展,手术趋向更微创化。2021年6月至12月我科开展单孔经腹膜外途径机器人辅助腹腔镜前列腺癌根治术(robot-assisted laparoscopic radical prostatectomy,RALRP)36例,术后患者顺利康复,现将体会总结报道如下。
1 资料与方法
1.1 临床资料 本组36例均为低危或中危前列腺癌患者,平均(70.4±7.0)岁,前列腺体积平均(36.23±5.19)mL,术前总前列腺特异性抗原(total prostate specific antigen,TPSA)平均(12.67±3.66)ng/mL,术前前列腺穿刺病理均明确为前列腺腺癌,Gleason评分均≤7分,临床TNM分期T2c期2例(年龄均大于75岁),余34例为T2c期以下。术前患者均未接受内分泌治疗。术前骨扫描或PET-CT检查均未发现骨转移。
1.2 手术方法
1.2.1 通道建立、体位及装配机械臂 均采用气管插管全身麻醉,麻醉成功后,取耻骨联合上方3横指处做3~4 cm横行切口,依次切开皮肤、皮下组织,纵向切开腹直肌前鞘,钝性分离腹直肌,食指与气囊分离扩张腹膜外间隙。获得满意的腹膜外间隙后,置入单孔Port。连接气腹机,充入CO2,压力维持在13~15 mmHg。患者取头低足高15度位,两腿适当分开,机器人从尾侧两腿之间定泊,装配机械臂。单孔Port的尾侧通道置入镜头,左右两个通道分别置入双极镊与单极电剪刀,头侧通道留作助手的辅助孔,放置吸引器、Hem-o-lok、剪刀或抓钳。
1.2.2 手术步骤 清除前列腺表面的脂肪组织,显露耻骨前列腺韧带。(1)20例患者行标准的筋膜外切除技术(第1组),见图1。具体步骤:打开盆筋膜腱弓,分离显露深面的盆筋膜间隙,切断部分耻骨前列腺韧带,显露其深面的背血管复合体外侧缘。用针长36 mm的2-0倒刺缝线贯穿缝合背静脉复合体(dorsal vein complex,DVC)与耻骨前列腺韧带,利用倒刺线的自动收紧功能缝合3针后剪断缝线。辨认前列腺与膀胱颈口的交界部位,切开膀胱颈前唇,吸尽膀胱内尿液,去除导尿管,辨认膀胱颈后唇后予以切开。沿后唇深面寻及疏松层面,辨认膀胱前列腺肌,钝性分离后找到输精管,离断输精管后沿精囊表面分离,精囊动脉细致止血防止断端出血。提起精囊暴露其根部,打开附着在其后方的狄氏筋膜,沿后方的疏松层面向远端分离至靠近前列腺尖部。Hem-o-lok夹闭并离断两侧前列腺侧韧带,直至前列腺远端约三分之二处。靠近DVC缝扎处切开前列腺前方的纤维肌层组织,显露尿道前壁。左右旋转已大部分游离的前列腺,仔细处理前列腺尖部,注意保护后方的直肠。剪刀锐性剪开尿道前壁,拔除导尿管,离断尿道后壁,注意靠近前列腺部位,从而最大程度地保留尿道。置入导尿管,气囊注水5 mL后适当牵拉压迫止血。暂时撤除机械臂,关闭气腹,打开单孔Port,取出前列腺标本后再次装配机械臂。降低气腹压力为8 mmHg,检查是否存在活动性出血,细致止血后,用3-0倒刺线吻合膀胱颈口与远端尿道。放置盆腔引流管,自腹直肌前鞘侧方引出,依次关闭各层切口,皮肤切口采用皮内缝合。(2)10例患者行常规的筋膜内切除技术(第2组),见图2。与筋膜外切除技术不同之处在于:精囊分离后于其根部细致剥离,寻及前列腺包膜,采用钝性推剥的方法,在前列腺包膜外游离完整的前列腺,从而保留完整的前列腺侧韧带。同时,处理出血时尽量少采用电凝,或使用小功率的电凝止血及表浅的缝扎,避免大范围的热损伤。其余操作同筋膜外切除技术。(3)6例患者采用最大保留周围结构的筋膜内切除技术(第3组),见图3。与常规的筋膜内技术不同之处在于:术中不打开盆筋膜腱弓,从而不分离盆筋膜外侧间隙;也不离断耻骨前列腺韧带,不缝扎DVC。即在清除完前列腺表面的脂肪组织后,直接开始离断膀胱颈前唇。在膀胱颈与远端尿道吻合完毕后,将膀胱侧面的筋膜组织与之前保留的盆筋膜适当缝合,从而恢复两者的完整性、连续性。其余操作同常规的筋膜内技术。
1.3 统计学处理 采用SPSS 20.0软件进行数据分析,计数资料比较采用χ2检验,计量资料采用方差分析。P<0.05为差异有统计学意义。
2 结 果
患者均顺利完成手术,无中转开放。手术时间:第1组平均(75.5±15.5)min,第2组平均(105.6±18.8)min,第3组平均(85.6±16.8)min。术中出血量三组相比差异有统计学意义(P<0.05),见表1。患者均于术后6 h后开始进食流质饮食,术后24 h内下床活动,术后平均住院时间第1组(5.85±0.93)d,第2组(6.0±0.82)d,第3组(6.17±0.75)d。术后2例患者出现漏尿,适当牵拉导尿管后自行愈合,术后第14天拔除导尿管,余者均于术后10 d拔除导尿管。术后2例患者病理提示侧切缘阳性,术后尿控恢复后予以局部放疗。
术后6周复查TPSA,均降至0.05 ng/mL以下。在尿控恢复方面,完全尿控定义为不穿尿垫或只穿一个安全垫。即刻尿控三组差异有统计学意义(P<0.05),见表1。术后1个月尿控:第1组75%(15/20),第2组80%(8/10),第3组100%(6/6);术后3个月尿控:第1组90%(18/20),第2组100%(10/10),第3组100%(6/6);术后6个月时,患者均恢复完全尿控。在性功能恢复方面:第1组患者术后几乎无勃起功能,少数患者存在短暂阴茎充血,但无法完全勃起;第2组的10例患者中,术前6例有正常的同房,术后目前3例可完成同房,另3例阴茎有部分充血,但无法完成性生活;第3组的6例患者术前均有正常性生活,术后1个月随访时有半数患者有阴茎勃起,术后3个月时5例患者可完成性生活,目前随访6个月,仅1例患者虽有阴茎充血,但无法完成性生活;三组相比差异有统计学意义(P<0.05),见表1。

图1 筋膜外切除(A:缝扎背血管复合体;B:离断前列腺侧韧带;C:离断远端尿道;D:吻合膀胱颈口与尿道)

表1 3组患者相关指标的比较
3 讨 论
目前根治性前列腺切除术仍是局限性前列腺癌的标准治疗方案之一。与传统开放手术、常规腹腔镜手术相比,机器人手术具有视野更广、操作更为灵活等诸多优势。随着机器人手术应用的日趋增多,前列腺癌术后的恢复较此前更为迅速[1]。研究表明,超过80%的患者在RALRP术后1年可恢复尿控,但仍有50%的患者在术后3个月时尿控仍不是十分理想。因此提高患者术后早期尿控是目前RALRP面临的重要问题[2-3]。此外,常规经腹腔RALRP、经腹膜外RALRP均需要多孔操作,术中操作时间延长,术后患者切口疼痛较明显;尤其经腹腔手术,术中对肠管存在干扰,术后需要排气后才能恢复饮食;而且容易受以往手术所致肠粘连的影响,操作不便。有腹部手术史的患者,上腹部、侧下腹部切口,腹腔脏器、腹膜外间隙可能存在粘连,对于此类患者而言,选择下腹部正中单切口手术可避免此类问题的干扰,从而更好地开展RALRP[4]。
我单位开展的单孔机器人手术,采用下腹部横行小切口,术后切口张力极低,几乎无疼痛感;术后引流管拔除后下腹部切口可被内裤上缘遮挡。因经腹膜外操作,因此对肠道无干扰,术后6 h麻醉清醒后即可开始进食流质饮食,更利于早期康复。
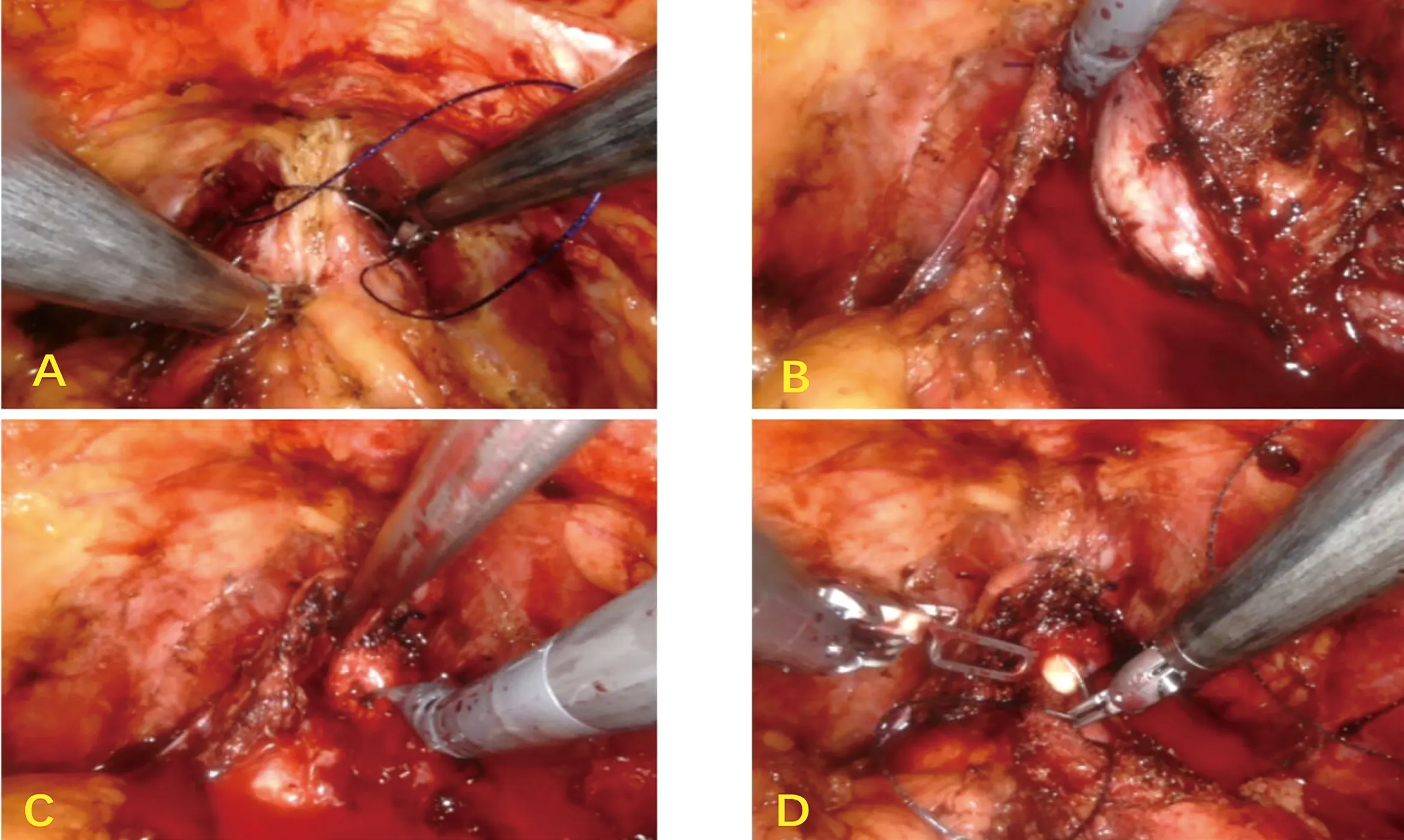
图2 常规筋膜内切除(A:缝扎背血管复合体;B:保留前列腺侧韧带;C:离断远端尿道;D:吻合膀胱颈口与尿道)

图3 最大保留周围结构的筋膜内切除(A:切开膀胱颈口;B:保留前列腺侧韧带;C:离断远端尿道;D:吻合膀胱颈口与尿道)
前列腺癌根治术的三连胜原则是确切瘤控、良好尿控及性功能恢复。传统观念认为,DVC主要引流阴茎与尿道的静脉,目前认为,DVC包含来源于膀胱下动脉或副阴部动脉的分支血管,其功能与支配尿道括约肌、阴茎勃起有关,因此也被称为背血管复合体。从本研究术后随访来看,绝大部分患者均取得了良好的肿瘤控制效果,TPSA降至极低水平。其中1例患者术后病理提示侧切缘阳性,进行了补救性的放疗,随访3个月TPSA为0.01 ng/mL。在尿控方面,术后6个月,患者均实现了完全尿控。其中在早期即刻尿控方面,我们观察到三组差异有统计学意义(P<0.05),提示第2组(常规筋膜内切除技术)、第3组(最大保留周围结构的筋膜内切除技术)在即刻尿控方面优于第1组,表明筋膜内切除技术在早期尿控方面具有优势,尤其最大程度保留周围结构的筋膜内切除技术,早期尿控恢复的优势更加明显。分析其原因,我们认为,这与术中保留了尿控的重要结构关系密切,包括耻骨前列腺韧带、DVC、神经血管束等[5]。术中我们在保证彻底切除肿瘤的前提下,最大程度保留远端尿道,也为术后患者尿控的恢复提供了重要的解剖基础条件[6-7]。术后性功能恢复是部分较年轻患者的追求,本研究目前正在进一步随访患者阴茎勃起及完成同房的情况。术后6个月时,第1组患者术后几乎无勃起功能,少数患者存在短暂阴茎充血,但无法完全勃起;第2组患者术后半数可完成同房;第3组中83.3%的患者可完成性生活。这一结果提示最大程度保留周围结构的前列腺癌根治术,因术中不缝扎DVC,且保留了前列腺侧韧带及后方的神经血管束,因此对术后勃起功能的恢复具有较大帮助[8-10]。对于前列腺周围的神经血管束组织而言,最新的研究发现,其呈散发状分布,支配阴茎海绵体与尿道括约肌,对术后勃起、尿控也发挥重要作用[11-13]。在最大程度保留周围结构的筋膜内切除技术中,保留DVC的同时也很好地保留了大部分神经血管束,因此可获得更好的早期尿控恢复与勃起功能恢复[14-15]。
需要注意的是,因筋膜内切除过程中出血往往较多,尤其不缝扎DVC时,出血更为明显,因此第2组、第3组的术中出血量大于第1组,差异有统计学意义(P<0.05)。由于出血导致的视野不清,往往对术者、助手都是新的挑战。而且术中因缺少第三臂的支持与辅助,需要术者具有更为熟练的手术操作、更为全面的解剖认识,尤其应避免前列腺肿瘤的残留及直肠的损伤。在患者选择方面,也应严格入组。本组病例均为中低危,属于局限性前列腺癌,而且术中无需行淋巴结清扫。
RALRP起始于本世纪初,目前正日益被业内所认可,成为广大泌尿外科医生的首选手术治疗手段之一,其标准化流程可进一步优化手术操作步骤[16]。对于已熟练开展多孔RALRP的术者而言,单孔经腹膜外RALRP可成为中低危局限性前列腺癌的常规治疗方案。单孔机器人手术可使患者在术后康复方面更多获益,尤其筋膜内切除技术与最大保留周围结构的技术,在早期尿控恢复、性功能恢复方面可达到更好的效果,值得临床推广应用。
猜你喜欢
中国耳鼻咽喉颅底外科杂志(2022年4期)2022-11-19
医学概论(2022年3期)2022-04-24
家庭百事通·健康一点通(2020年10期)2020-10-27
恋爱婚姻家庭·养生版(2020年9期)2020-10-20
家庭医药·快乐养生(2020年9期)2020-09-27
晚晴(2017年11期)2017-11-12
中国实用医药(2016年29期)2016-12-26
中国实用医药(2016年20期)2016-08-11
健康必读(2016年6期)2016-07-13
扬子江(2016年1期)2016-05-19
