
柔性机座-转子系统动力学参数优化仿真
2022-09-19 05:53孙志买买提明艾尼尼加提玉素甫
机床与液压 2022年5期
孙志,买买提明·艾尼,尼加提·玉素甫
(新疆大学机械工程学院,新疆乌鲁木齐 830049)
0 前言
随着旋转机械向高转速、大跨度、柔性轻结构方向发展,转子系统的偏心、刚度、阻尼和质量及自身结构复杂性等因素的影响引起的稳定性问题日益突出。
为了解决此问题,早在1972年,KIRK和GUNTER提出了对转子系统应用动态阻尼器设计的固定点理论(PQ点理论)。1997年,郭增林等在固定点理论的基础上提出了虚拟振幅法,从而解决了滑动轴承-转子系统的最优弹性阻尼器匹配问题。2002年, ISHIDA、INOUE用固定点理论计算结果和用动态吸振器的实验测试结果对比研究了转子轴承系统的非线性影响,通过动态吸振器的最优设计获得了与线性相同的减振效果。2015年,RIBEIRO等针对黏弹性机座的优化设计提出了一种基于广义当量参数的方法,并通过使用混合优化技术达到了使频率不平衡响应最小化的目的。2016年,SHEN等利用负刚度的动态吸振器来降低系统振幅,发现在幅频曲线上仍然存在3个不动点,而通过利用固定点理论计算,获得了支承最优刚度阻尼比。黑棣等人以转轴刚度为控制参数,运用改进的 Newmark 法研究了拉杆转子的动力学特性,同时通过改变支点比和预负荷来研究转子系统动力稳定性,发现当转轴刚度、预负荷和支点比的匹配域范围合理时,转子运动更稳定。徐璐等人采用数值积分法,发现偏心量的取值会对系统状态产生显著影响。
买买提明·艾尼提出了基于“穷举法”的一种新的动力学参数最优匹配方法。通过在合理的给定域内离散支承刚度和阻尼、并在合理的给定转速范围内进行数值计算,从而获得支承刚度和阻尼与其他给定动力学参数相互匹配的最大振幅比及其分布范围,并用穷举法获取支承参数的最优匹配点及其最优匹配轨迹。然而转子系统的理论计算过程十分复杂,有必要针对全局动力学参数下的最佳支承参数匹配进行软件开发研究和软件平台建设。
作者将根据柔性机座-转子轴承系统全局最优参数匹配及其非线性动力学方程组的数值建模理论、关键算法,详细研究全局参变量的变化形式、编程技巧和算法技术,架构设计数值软件系统总体结构,编程实现高效的数值计算软件集成,同时建立方便的动力学参数全局最优匹配数值建模方法,为高效快速最优匹配数值分析和非线性振动分析提供软件平台,并以M701F重型燃气轮机转子系统作为研究背景进行可行性验证。
1 RSS机座-轴承转子系统动力学模型
燃气轮机透平端RSS机座支承的轴承-转子系统是复杂的多质量、非对称的系统。而机座在大参数、高速、高温、重载转子系统中,不仅起到支承的作用,而且在转子振动时对吸收能量和降低转子振幅也有重大作用。因此,RSS机座-轴承转子系统动力学参数的相互匹配将直接影响系统的稳定性。为了方便研究RSS机座的最优动力学参数匹配点及轨迹,本文作者将实际的RSS机座-轴承-转子系统简化成如图1所示的对称机座-轴承-转子(Jeffcott)系统,并建立了图1(a)和(b)所示的力学模型和计算坐标,可建立图1所示的力学模型。

图1 RSS机座-轴承-转子系统简图
对于单质量圆盘近似的转子来说有:
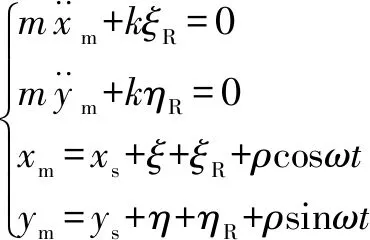
(1)
对于转子与滑动轴承来说有:

(2)
对于RSS支承座有:
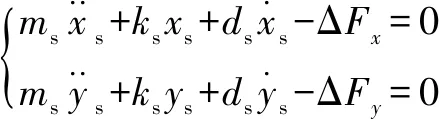
(3)
式中:为单质量圆盘近似的转子质量;为转子轴刚度;、、分别为RSS支承座的质量、刚度和阻尼;为质量偏心距。
滑动轴承在向转子系统提供阻尼方面比滚动轴承更有效,因而对于大型转子系统,常采用滑动轴承可以较好地减小振动。为了方便起见,滑动轴承设为固定瓦径向滑动轴承,这时轴颈中心和方向偏离静态工作点时所产生的油膜力增量为

(4)
式中:、(,=,)分别为油膜刚度和阻尼系数。
固定瓦径向滑动轴承的动力特性采用8个系数来描述。如公式(5)所示:
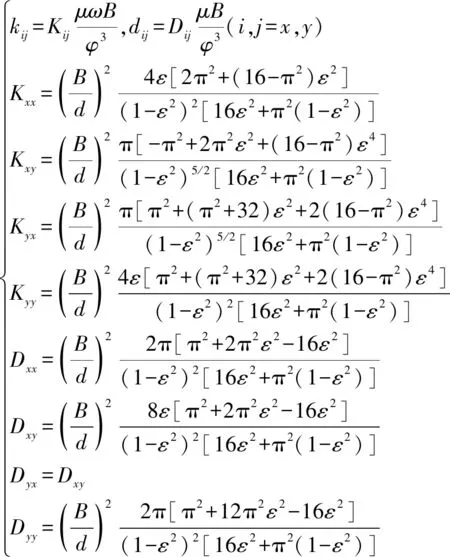
(5)
式中:为轴承宽度;为轴承内直径;为润滑油膜动压黏度;偏心率=;=为间隙比;为轴承的半径间隙;为轴承内半径;(,=,)为相应的量纲一刚度系数;(,=,)为相应的量纲一阻尼系数。
令:

(6)
以上、、…、、为复振幅。
圆盘振幅计算公式:

(7)
式中:=/60为转动频率,为转速;为圆盘最大振幅;、分别为圆盘在和方向移动的位移。
2 动力学参数全局最优匹配方法
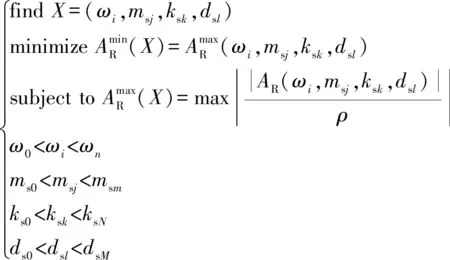
作者基于上述柔性RSS机座-轴承转子系统动力学模型与相关动力学公式,推导出系统的转子频率、振幅和支承质量、阻尼、刚度之间的关系式,提出了全局最佳匹配分析法。系统动力学参数最佳匹配就是在柔性RSS机座轴承转子系统参数中寻找能使系统振幅比达到较小的参数。因此本文作者将系统的转子及机座参数设为最佳匹配的设计变量,全局匹配分析方法示意如图2所示。

图2 全局匹配分析方法示意

(8)
本文作者将合理范围内的转子质量、支承刚度及阻尼离散成××组动力学参数并计算出匹配点集后排列组合,构成系统支承参数的一个复杂的多维匹配空间,如图3所示。
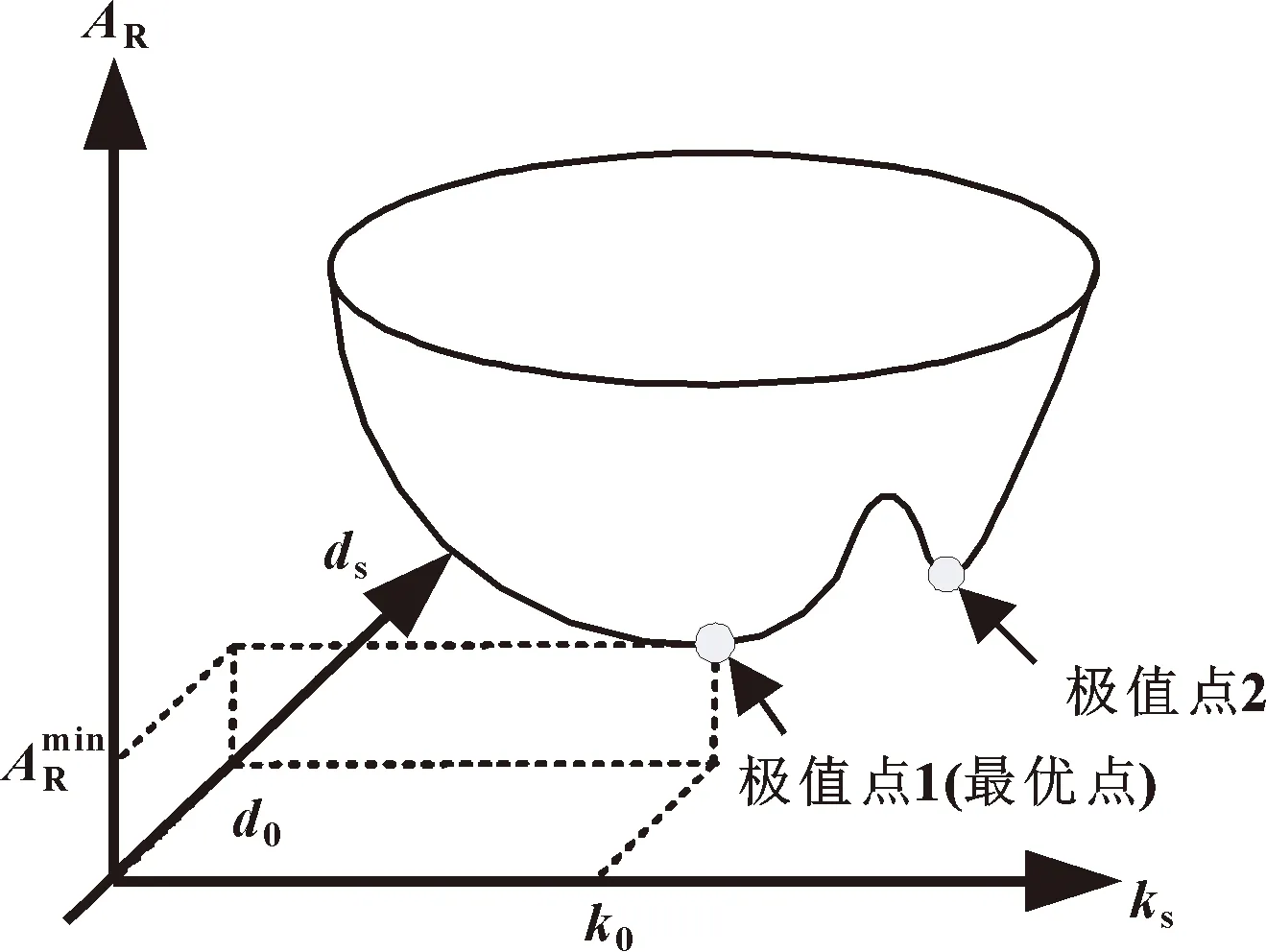
图3 刚度-阻尼-振幅曲面示意
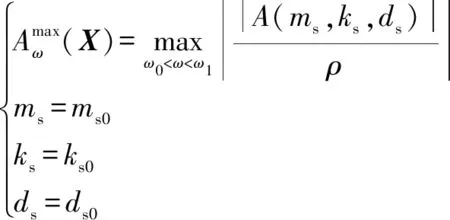
这是支承刚度和阻尼所组成的平面中计算出来的振幅比值在三维空间中构成的一个复杂曲面,而在这个复杂曲面中可能出现多个极值点,可通过式(7)寻找最小振幅比值,然后使用公式(9)来寻找最优匹配参数。
(9)

3 动力学参数全局最优匹配数值分析软件系统
本文作者利用计算机高效的计算特点,在“支承参数最佳匹配与振动控制软件” PASA-OSP的基础上进一步架构设计和优化编程,实现了动力学参数全局最佳匹配数值计算软件系统。通过输入评估范围内的刚度、阻尼、质量、转速、振幅及偏心率等参数就能够计算出全局最优匹配的过临界振幅值最小RSS支承刚度和阻尼,对数值计算结果进行分析,研究参数时变性对稳定性的影响规律,最终建立比较完善的全局最优匹配及稳定性评估方法,并可评价全局动力学参数匹配域及最优匹配轨迹等,其总体编程思路如图4所示。由于篇幅有限,具体内容可参考文献[13-14]。

图4 数值计算流程框图
4 全局动力学参数最佳匹配分析
为了验证软件系统的可行性,以M701F燃气轮机转子系统参数(见表1)为例,研究转子质量和刚度对系统最佳匹配的影响。

表1 转子和RSS机座参数
根据简化的Jeffcott转子,通过改变转子结构及质量,理论计算转子刚度,分析转子质量与转子刚度的变化关系,将转子质量的计算变化范围设定为10~10kg,其转子刚度全局变化范围为2.15×10~1.63×10N/m。根据对数坐标均匀离散为200个点进行逐一计算,分析研究转子参数变化对支承参数最优匹配的影响规律。
图5表示在偏心率为0.125时,并保持其他参数不变的条件下,随着转子质量及刚度变化,最佳匹配支承刚度和阻尼的变化规律。由图5可知,当转子质量从1.0×10kg增加到8.26×10kg时,所对应的最佳匹配支承刚度从1.41×10N/m降低到1.04×10N/m,支承阻尼从1.06×10N·s/m增加到2.51×10N·s/m,但其支承刚度变化曲线呈阶梯状下降,即在局部转子质量变化情况下其值保持不变,而支承阻尼则是成锯齿状曲线增长,即在对应局部转子质量变化情况下其值增加,但到下一阶段其值先下降后增加。

图5 支承参数最佳匹配点的变化规律
当转子质量由8.26×10kg增加到8.59×10kg时,如图5所示,最佳匹配刚度从1.04×10N/m突变到6.3×10N/m,最佳匹配阻尼也从2.51×10N·s/m突变到1.49×10N·s/m,显示出强烈的间断性和不连续性。且突变后最佳匹配的支承刚度及阻尼变化趋势出现交替变化。突变处的匹配云图如图6所示。

图6 支承刚度、阻尼与振幅比全局云图与最佳匹配点
图6中所示的白圆圈点表示最小振幅出现的位置,也是RSS支承参数最佳的匹配点。从图6(a)可以看出:当转子刚度大于1.75×10N/m时最佳匹配点从封闭狭窄的三角域内的点突变到点,然后随着转子刚度逐渐增加形成新的匹配区域。
随着转子质量继续增加至9.97×10kg,最佳匹配支承刚度在6.3×10N/m到1.04×10N/m区间内开始呈锯齿形下降,而最佳匹配支承阻尼从1.49×10N·s/m到2.37×10N·s/m区间内呈阶梯状上升。
结合图7为控制振幅比小于1.2时,最佳振幅比与转子刚度和支承刚度的变化关系,可以看出:当转子刚度为4.4×10~1.66×10N/m;支承刚度变化范围控制在1.04×10~3.55×10N/m,可使振幅比小于1.1。而M701F燃气轮机转子系统的转子刚度及支承刚度均处于这个范围。
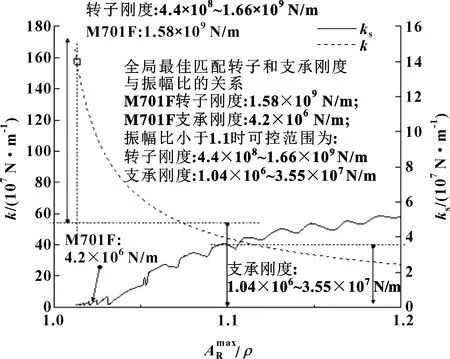
图7 最佳匹配支承刚度下的转子刚度和
以上分析可以看出:当偏心率为0.125,转子参数变化,保持其他参数不变的条件下,最佳匹配点轨迹在转子刚度1.75×10N/m附近呈现出奇异性,而奇异区域前后的支承刚度及阻尼变化趋势恰好相反,且M701F燃气轮机转子系统的转子刚度及支承刚度处于最佳匹配范围,验证了系统的可靠性与可行性。
5 结论
(1)通过全局匹配分析方法,建立动力学参数全局最优匹配数值分析软件系统,研究基于M701F燃气轮机转子系统参数的数值分析,只需输入转子、支承机座和轴承的关键参数,就可高效快速地进行最优匹配数值分析和非线性振动分析。
(2)通过在全局转子质量、刚度和支承刚度、阻尼范围内进行数值计算分析可知:当偏心率等于0.125,稳定的转子刚度可在4.4×10~1.66×10N/m的范围选择最优,支承刚度变化范围控制在1.04×10~3.55×10N/m,这样可保证过临界振幅比不超过1.1的支承参数最优匹配。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
防爆电机(2021年4期)2021-07-28
防爆电机(2021年2期)2021-06-09
电力与能源系统学报·上旬刊(2020年4期)2020-10-12
金桥(2018年4期)2018-09-26
智能制造(2017年11期)2017-03-30
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
北京航空航天大学学报(2016年9期)2016-11-16
