
基于有限状态机的输电线路巡检机器人自主越障运动控制方法
2022-09-19 05:53王吉岱梁茂轩孙爱芹王云霞侯建国张斌
机床与液压 2022年5期
王吉岱, 梁茂轩, 孙爱芹, 王云霞, 侯建国, 张斌
(1.山东科技大学机械电子工程学院,山东青岛 266590;2.国电南瑞科技股份有限公司,江苏南京 211106;3.南瑞集团(国网电力科学研究院)有限公司,江苏南京 211106)
0 前言
输电线路巡检机器人是一种沿架空高压输电线路进行巡检工作的电力作业机器人,其自主越障运动控制技术一直是国内外研究的热点。
加拿大魁北克水电研究院及日本HiBot公司等国外研究机构首先对输电线路巡检机器人进行了研制,所研制的机器人采用手动遥控的方式完成了线路障碍的跨越,证明了使用机器人对输电线路进行巡检的方案是可行的。随着机器人技术的不断发展,国内一些研究机构及高校也对输电线路巡检机器人进行了研制,并对其自主越障技术开展了大量研究工作。付双飞、王伟、宋树伟等提出了一种基于传感器信息建立专家系统来实现机器人自主越障运动控制的方法,其中知识库的质量决定着专家系统推理结果的正确性,易发生因知识库内先验知识不足而导致推理失败的现象。王鲁单等采用预编程与传感器定位相结合的方法,实现了机器人的自主越障控制,但其机械臂找线时间决定了机器人越障效率较低。郭伟斌等基于模糊推理及有限状态机理论实现了机器人遥控与局部自主越障,其中推理结果是否正确、重心调节是否合适是机器人越障能否成功的关键,易发生因推理失败、重力倾覆而导致越障失败的现象。张义杰等提出了一种机器人始终与障碍物保持安全距离的自主越障控制方案,但机器人越障效率较低。
综上所述,目前输电线路巡检机器人自主越障运动普遍存在控制复杂、越障效率低、稳定性差的问题。针对上述问题,以一款新型的沿地线行驶的输电线路巡检机器人为例,提出一种自主越障运动控制方法。将机器人越障动作过程等同为机器人姿态转换过程,通过建立以传感器检测信息为迁移条件的越障运动控制模型,对机器人越障运动进行控制,并进行实验,以验证机器人自主越障运动控制方法的有效性。
1 机器人系统组成与运动规划
1.1 机器人系统组成
机器人本体主要由3个行走臂(Ⅰ~Ⅲ),2个压紧臂(Ⅳ、Ⅴ)及控制箱体Ⅵ等六部分组成,如图1(a)所示。其中:手臂伸缩机构1可以进行上下伸缩动作,手臂开合机构2可以进行开合动作,行走驱动轮3可以进行行走动作,故称手臂Ⅰ~Ⅲ为行走臂,3个行走臂处于同一直线位置,避免了越障过程中的手臂找线动作;机器人行驶至充电基站时可通过充电接口4进行自主对接充电;双压紧轮结构6可以对输电线路5进行压紧,使输电线路与行走驱动轮紧密接触,防止机器人发生行走打滑与前后整体倾覆的现象,故称手臂Ⅳ、Ⅴ为压紧臂。为描述方便,对手臂作出如下定义:巡检的方向为机器人前方,位于前方的手臂为前行走臂及前压紧臂,统称为前臂,以此类推。
机器人控制系统构成如图1(b)所示,系统由一台接入局域网的PC机作为地面基站为系统管理级,一台安装Ubuntu16.04操作系统和机器人操作系统(ROS)的TX2为系统组织级,ARM1(STM32F407)和ARM2(STM32F407)并行分布作为系统执行级。地面基站通过无线网络远程交互机载TX2,实时显示和处理系统信息并向机器人发布控制指令。TX2作为机器人本体主控制器,主要负责机器人本体动作决策;ARM1为机器人周围环境信息采集及本体状态信息感知单元;ARM2为机器人运动控制单元;巡检设备将采集的信息汇集至交换机,通过无线网络传输至地面基站进行下一步处理。
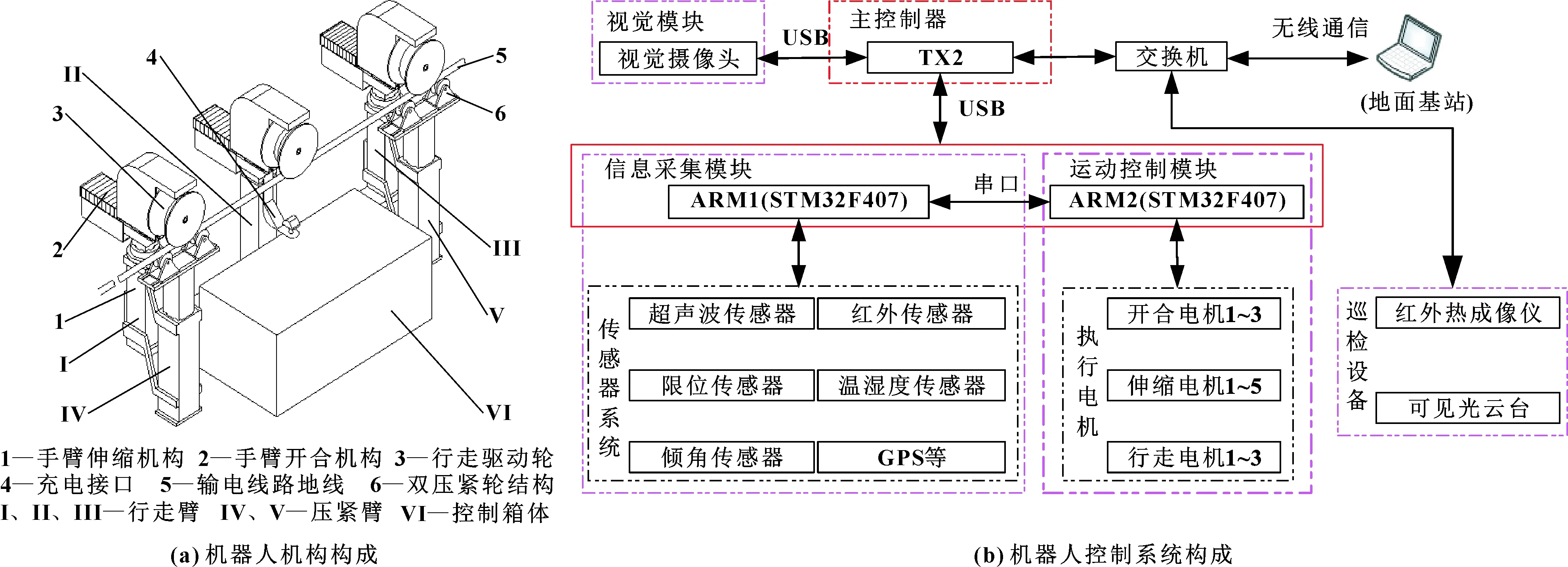
图1 机器人系统框图
机器人本体状态信息可分为机器人关节状态信息及整机运行状态信息。机器人关节状态信息主要通过行走电机编码器、限位开关来检测。行走电机编码器可检测机器人行走速度。伸/缩限位开关可检测手臂的伸缩状态,开/合限位开关可检测手臂开合状态。当机器人处于高速行走状态下,且行走臂位于缩限位位置和开限位位置、压紧臂位于伸限位位置时,为机器人正常巡检姿态,简称为常态。整机运行状态信息主要通过倾角传感器、温湿度传感器、库仑计、行走电机编码器及压紧轮编码器进行检测。当各传感器检测到机器人整机运行状态发生异常时,机器人停止巡检,并向地面基站发出相应异常警告,等待地面操作人员指令。
1.2 机器人越障运动规划
越障的概念可简单描述为机器人在与障碍物不发生碰撞的前提下通过障碍。由于线路障碍相对固定,巡检任务按障碍类型可分为无障碍直线段巡检、悬垂线夹障碍巡检、防振锤障碍巡检及异物障碍巡检,分别对上述巡检任务运动过程进行规划。无障碍直线段内机器人以常态执行巡检任务;当线路前方障碍为异物障碍时,机器人停止巡检,等待地面基站动作指令。下面将重点对机器人跨越防振锤障碍及悬垂线夹障碍时的运动过程进行设计与规划。
(1)跨越防振锤障碍动作规划
由机器人本体结构可知,机器人以常态执行巡检任务时,与防振锤发生碰撞的部位为压紧臂伸出部位,故机器人跨越防振锤障碍动作序列可视为压紧臂跨越防振锤障碍动作序列。两压紧臂交替越障,其越障方式如下:越障压紧臂收缩至缩限位位置,机器人低速行走。规划机器人跨越防振锤障碍动作序列如图2所示。

图2 机器人跨越防振锤障碍动作序列
(2)跨越悬垂线夹障碍动作规划
机器人以常态执行巡检任务时,与悬垂线夹发生碰撞的部位为行走臂行走轮部位及压紧臂伸出部位,故机器人跨越悬垂线夹障碍过程可视为行走臂与压紧臂越障过程的有机结合。3个行走臂交替越障,其越障方式如下:越障行走臂伸出至伸限位位置,行走轮脱离线路打开至开限位位置,机器人慢速行走。压紧臂跨越悬垂线夹障碍方式和跨越防振锤障碍方式一致。规划机器人前行走臂及前压紧臂跨越悬垂线夹障碍动作序列如图3所示,其他手臂越障方式与之类似。
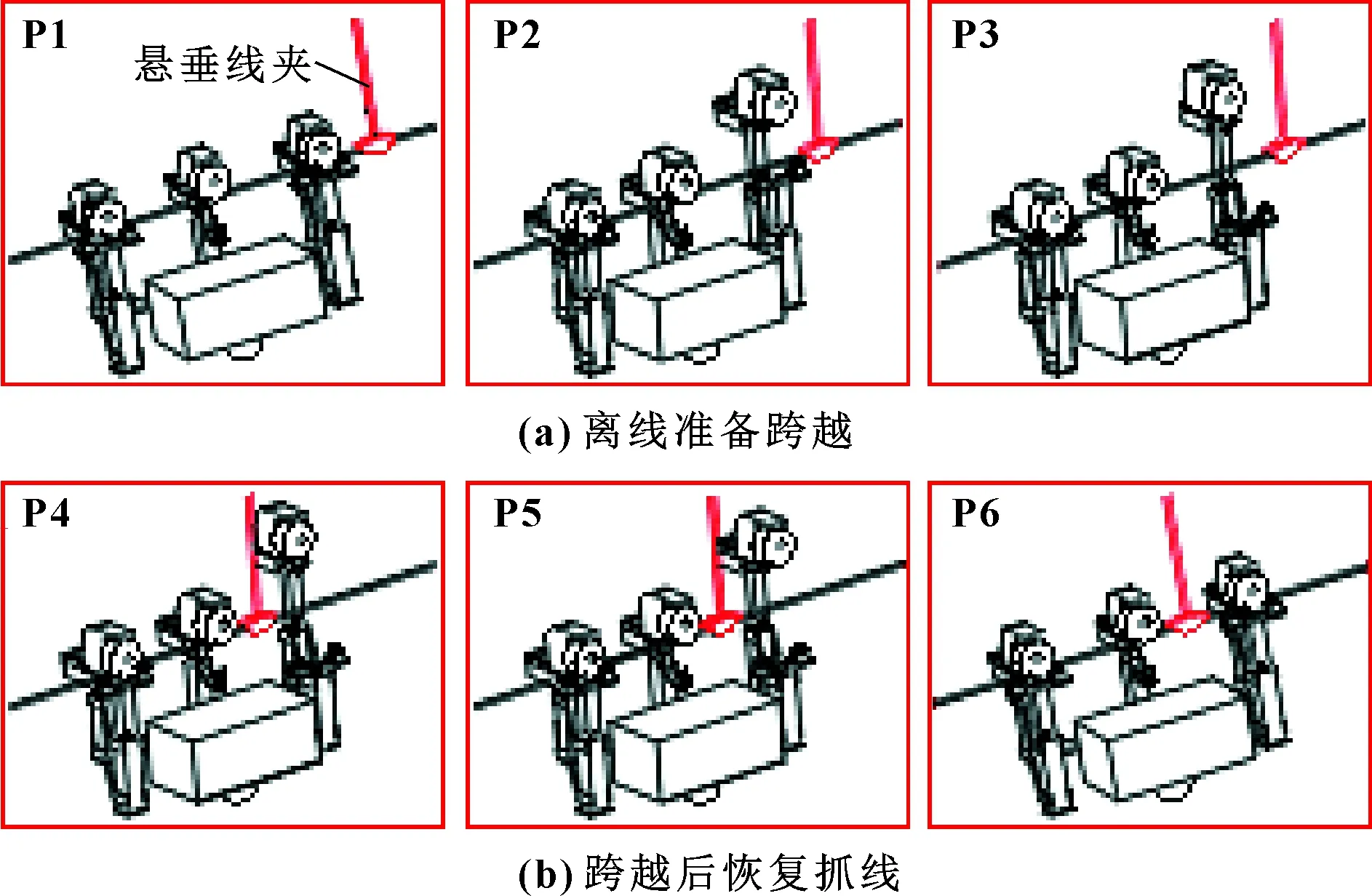
图3 机器人跨越悬垂线夹障碍动作序列
2 越障运动控制模型的建立与实现
2.1 有限状态机理论
通过规划机器人越障动作序列,可以发现机器人越障的过程其实就是机器人各种姿态转变的过程。机器人各种姿态的转变可以通过有限状态机进行描述。有限状态机是一种具有有限个状态变换的概念机,一般包含3个部分:1个有限状态集合、1个输入集合及1个状态迁移规则集合。有限状态机可以由一个五元数组表示:

(1)
式中:为系统内部状态的有限集合;为系统的输入事件集合;为系统的状态迁移函数;为初始状态;为系统终止状态集合。
将机器人越障过程中各种姿态作为系统内部状态集合,传感器检测信息作为系统输入事件集合,建立越障运动控制模型对机器人自主越障运动进行控制。根据线路障碍类型不同,分别建立跨越防振锤障碍运动控制模型及跨越悬垂线夹障碍运动控制模型。机器人通过判断障碍物类型及整机运行状态进入相应运动控制模型。
2.2 跨越障防振锤障碍运动控制模型建立
本文作者仅以机器人跨越防振锤障碍为例描述机器人运动控制模型建立过程,跨越悬垂线夹障碍运动控制模型建立方法与之类似,故不再赘述。
(1)将引导机器人运动的传感器检测信息进行离散化处理。手臂通过搭载的红外线接近传感器可以检测前方80 mm内是否存在障碍:0表示手臂前方无障碍、1表示手臂前方有障碍。分别建立前臂前行障碍信息集合、中臂前行障碍信息集合及后臂前行障碍信息集合:

(2)

(3)

(4)
机器人运动关节主要包括行走臂伸缩关节、行走臂开合关节、压紧臂伸缩关节及行走轮行走关节。将机器人各关节信息进行离散化处理:
前行走臂关节状态:表示位于伸限位位置,表示位于缩限位位置,表示位于开限位位置,表示位于合限位位置;
中行走臂关节状态:表示位于伸限位位置,表示位于缩限位位置,表示位于开限位位置,表示位于合限位位置;
后行走臂关节状态:表示位于伸限位位置,表示位于缩限位位置,表示位于开限位位置,表示位于合限位位置;
前压紧臂关节状态:表示位于伸限位位置,表示位于缩限位位置;
后压紧臂关节状态:表示位于伸限位位置,表示位于缩限位位置;
机器人行走状态:表示停止,表示低速(0.2 m/s),表示高速(0.6 m/s)。
分别建立关节状态信息集合:

(5)

(6)

(7)

(8)

(9)

(10)
将各关节状态信息集合合并为机器人关节状态信息集合:
选取2015年3月到2016年3月期间在我院进行治疗的颈椎管狭窄以及颈椎损伤的60例患者,根据治疗方法的不同将其随机分为实验组和对照组,每组各30例患者。所有患者均经过磁共振成像(MRI)、CT等检查确诊患有该病。其中实验组30例患者中男16例,女14例.年龄在44到70岁之间,平均年龄53.2岁。对照组30例患者中男17例,女13例,年龄在43到68岁之间,平均年龄52.1岁。两组患者在性别、年龄等一般资料的比较差异无统计学意义(P>0.05),具有可比性。

(11)
将机器人手臂前行障碍信息及机器人关节状态信息结合,建立传感器检测信息集合:

(12)
(2)将机器人跨越防振锤障碍时关键姿态定义为7种:

(13)
式中:~表示机器人跨越防振锤障碍动作序列中7种关键姿态;为机器人常态。
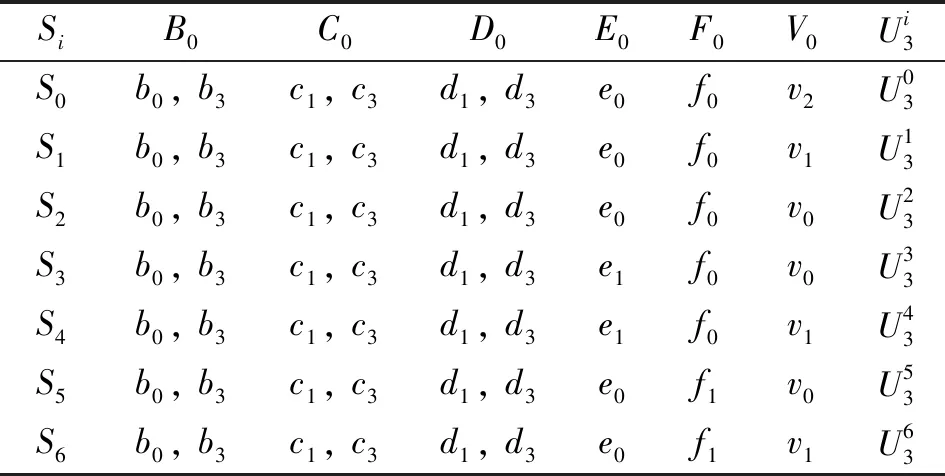
表1 机器人姿态与关节状态对应
(3)依据越障动作序列,基于有限状态机理论,建立以传感器检测信息集合为迁移条件的机器人跨越防振锤障碍运动控制模型:

(14)
式中:

=;

=;
其中:,,、,,分别表示由姿态向姿态迁移的控制函数及监督函数。
机器人跨越防振锤障碍过程中姿态迁移情况如图4所示,相对应的迁移条件、姿态迁移函数、控制函数与监督函数如表2所示。

图4 机器人越障姿态迁移示意

表2 机器人越障姿态迁移

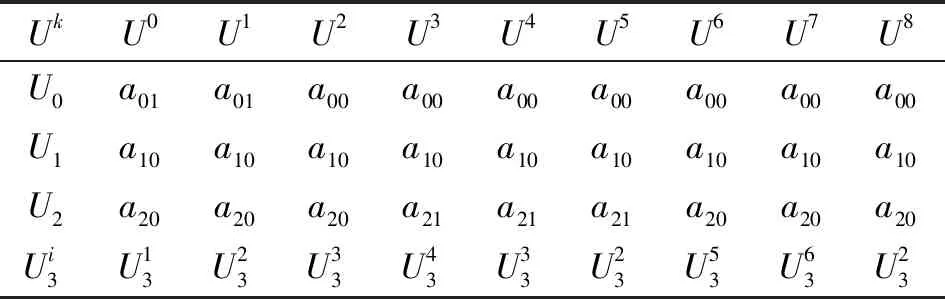
表3 机器人越障姿态迁移条件
表2中,,,表示由姿态向姿态迁移的控制函数,机器人接收控制命令,执行相应动作,为可控事件。,1,2表示控制机器人停止行走;,2,3表示控制机器人前压紧臂收缩至缩限位位置;,3,4表示控制机器人低速行走;,4,3表示控制机器人停止行走;,3,2表示控制机器人前压紧臂伸出至伸限位位置;,2,5表示控制机器人后压紧臂收缩至缩限位位置;,5,6表示控制机器人低速行走;,6,2表示控制机器人低速行走3 s后机器人停止行走,后压紧臂伸出至伸限位位置;,2,0表示控制机器人高速行走,此时,机器人退出跨越防振锤运动控制模型,恢复巡检常态。
,,表示由姿态向姿态迁移的监督函数,通过检测本体状态信息监测机器人姿态迁移是否成功,为自动事件。
2.3 障碍类型识别
障碍类型的准确识别是机器人实现自主越障的前提条件,机器人障碍识别流程如图5所示。机器人通过安装在前行走臂及前压紧臂上的超声波传感器(检测距离20~1 200 mm)检测前方线路是否存在障碍。当巡检方向上任一超声波传感器检测到信号时,都认为前方线路有障碍,机器人由高速行走状态转为低速行走状态。
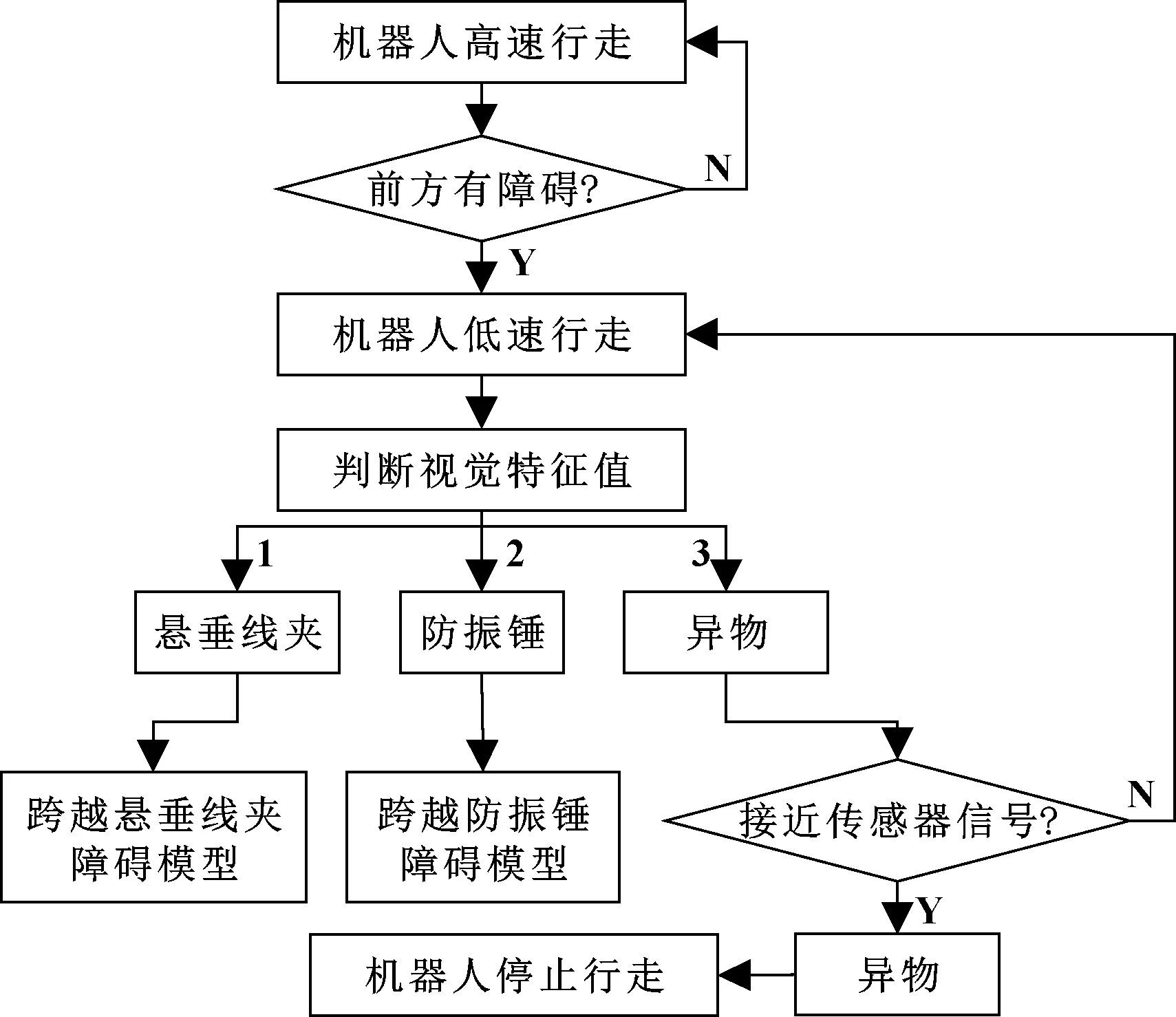
图5 障碍识别流程
机器人前后两侧装有单目摄像头作为机器人视觉模块,在主控制器中与超声波传感器数据进行特征值关联融合。关联融合过程中取摄像头检测到悬垂线夹时,视觉特征值为1;检测到防振锤时,视觉特征值为2;其他情况,视觉特征值为3。融合决策器如式(15)所示:
=
(15)
式中:为前方线路有无障碍特征值;为视觉模块特征值;为决策结果。机器人障碍类型决策如表4所示。机器人依据融合决策结果确定前方线路障碍物类型,并进入相应运动控制模型,实现自主越障运动控制。通过安装在手臂上的接近传感器(检测距离10~1 000 mm)可使机器人在距障碍物约70 mm处停止行走。

表4 传感器信息决策
3 实验
为验证机器人系统的合理性及机器人自主越障运动控制方法的有效性,将机器人置于待检线路进行实验。机器人接收到自主巡检指令,开始以常态进行巡检。
机器人在距防振锤障碍约1.1 m处检测到前方有障碍,开始以0.2 m/s的速度进行巡检。当识别出前方障碍为防振锤时,进入跨越防振锤障碍运动控制模型,开始执行防振锤障碍巡检任务,如图6所示。机器人前压紧臂红外接近传感器得到信号后,机器人停止行走,机器人由姿态转变为姿态,见图6(a);机器人前压紧臂收缩,当机器人前压紧臂缩限位得到信号时,机器人由姿态转变为姿态,见图6(b);机器人低速行走,机器人由姿态转变为姿态,见图6(c);当机器人后压紧臂红外接近传感器得到信号后,机器人行走停止,机器人由姿态转变为姿态,见图6(d);机器人前压紧臂伸出,当机器人前压紧臂伸限位得到信号后,机器人由姿态转变为姿态,见图6(e);机器人后压紧臂收缩,当机器人后压紧臂缩限位得到信号后,机器人由姿态转变为姿态,见图6(f);机器人慢速行走,机器人由姿态转变为姿态,见图6(g);机器人慢速行走3 s后停止,机器人后压紧臂伸出,当机器人后压紧臂伸限位得到信号后,机器人姿态由转变为,见图6(h);机器人高速行走,恢复巡检常态,见图6(i);跨越防振锤动作序列完成,机器人继续以常态进行巡检。整个跨越防振锤障碍过程大约用时54 s。
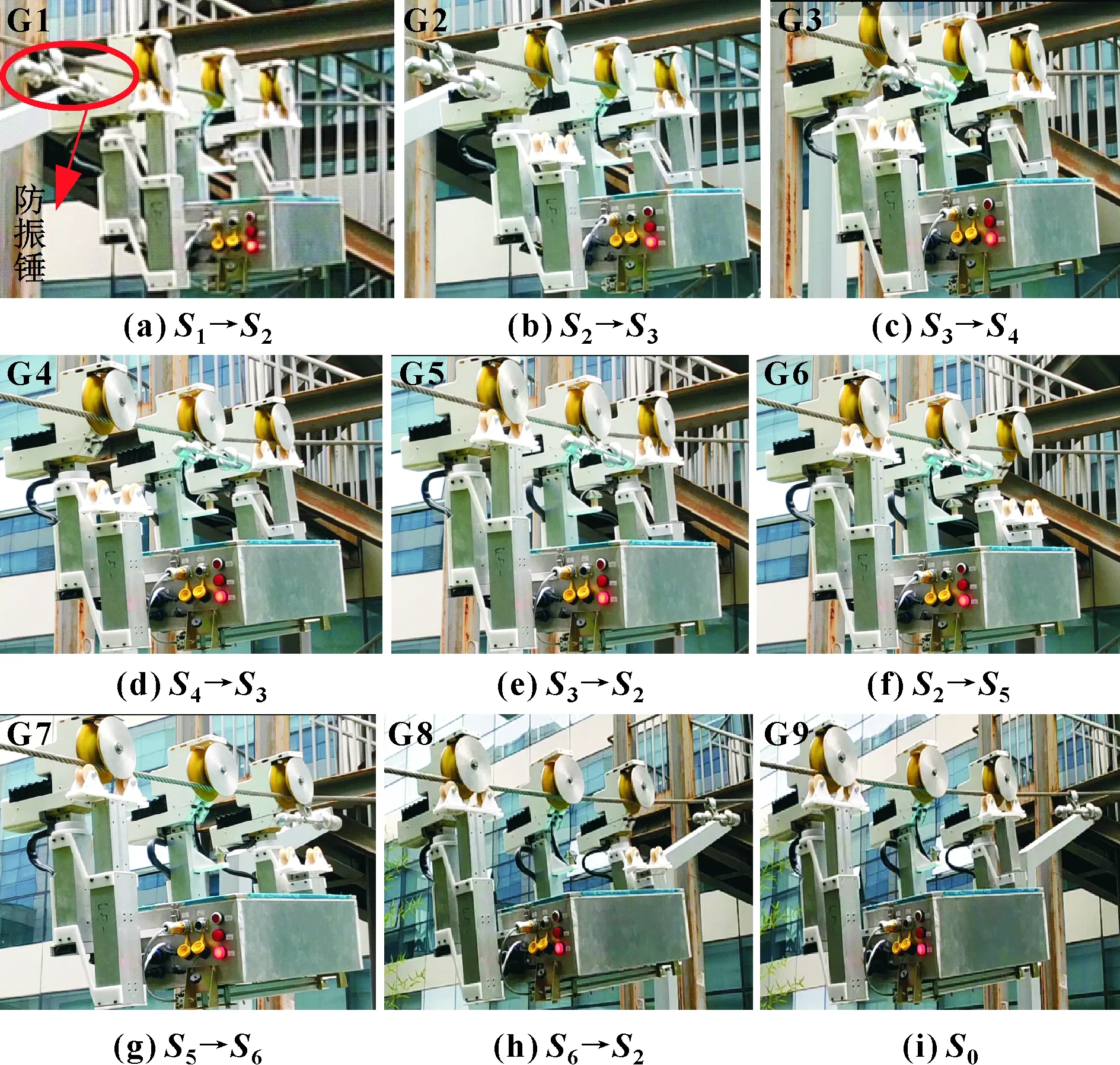
图6 机器人跨越防振锤障碍
因悬垂线夹上方悬垂链结构被检测面积较小,机器人高速行走状态下检测到前方具有障碍的距离在0.6~1.1 m内波动。检测到障碍后,机器人由0.6 m/s的高速行走状态转变为0.2 m/s的低速行走状态,并对障碍物类型进行识别。当识别出前方障碍为悬垂线夹时,机器人结合本体状态信息进入跨越悬垂线夹障碍运动控制模型,机器人跨越悬垂线夹障碍过程如图7所示,机器人跨越悬垂线夹障碍大约用时110 s。
实验过程中,机器人在自主巡检任务模式下,识别出障碍类型后会自动进入对应越障运动控制模型,并能结合传感器检测信息准确地完成各种越障姿态迁移,从而完成金具障碍的跨越。若未检测出前方障碍类型,机器人会将其归为异物障碍,在距障碍物约70 mm处停止巡检,并向地面基站发出异物障碍提醒,等待地面操作人员指令。当机器人本体运行状态发生异常时,机器人会停止一切巡检任务,并向地面基站发出运行异常警告,等待操作人员命令。实验结果验证了机器人系统的合理性及自主越障运动控制方法的可行性。

图7 机器人跨越悬垂线夹障碍
4 结论
本文作者依据一种新型的沿地线行驶的输电线路巡检机器人提出了一种自主越障运动控制方法。规划机器人越障动作序列及分析机器人各关节传感器检测信息与机器人位姿之间的对应关系,基于有限状态机理论建立了机器人自主越障运动控制模型,对机器人越障运动进行控制。进行了线路巡检实验,结果表明:利用该方法,机器人能较为准确地识别出金具障碍类型并进入相应越障运动控制模型,能够稳定、高效地跨越线路上金具障碍,完成巡检任务。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
汽车实用技术(2022年16期)2022-08-31
学生天地(2020年3期)2020-08-25
哈尔滨轴承(2020年4期)2020-03-17
时代英语·高一(2019年1期)2019-03-13
文苑(2018年17期)2018-11-09
汽车观察(2018年9期)2018-10-23
军营文化天地(2017年4期)2017-06-15
诗选刊(2015年4期)2015-10-26
人生十六七(2015年7期)2015-02-28
