
基于网络的注塑机液压远程监控系统研究
2022-09-16 13:04:40李光明王莺洁
机床与液压 2022年6期
李光明,王莺洁
(陕西科技大学电气与控制工程学院,陕西西安 710021)
0 前言
随着社会的进步与高速发展,塑料制品的精度和性能成为人们所关注的焦点,各行业都对此提出了更高的要求。传统的注塑机控制过程自动化水平低,上料/下料采用人工方式,劳动强度大,并且有一定的安全隐患,对注射压力、注射速度、料筒各段温度的监控等要求较高,如果注塑机设备出现故障,在实际维护时受地域限制,人员不在现场、维修指令传达不清楚,维护效率低等原因影响生产进度。这些也都是影响注塑机发展的因素。为了提高生产效率,提升对车间加工生产的监管控制能力,对企业自动化程度和智能集中监控水平有了更高的要求。
本文作者提出远程注塑机监控系统,针对注塑机在工艺流程中对压力、温度、时间等参数的超高要求,在使用过程中维护不便利等问题,采用AMESim软件搭建注塑机中的液压系统仿真模型,模拟出注塑机液压系统的压力、速度等数据。在飞速发展的计算机技术的大力推动下,仿真技术在过去十年中发展迅速,几乎在每个学科和领域都得到了广泛的研究和应用。正是高效率、低成本和良好的灵活性使仿真技术如此流行。在对真实系统有一定了解的基础上,遵循相似同构原则,可以建立系统的仿真模型。通过研究仿真模型,可以摆脱直接研究真实系统的限制和局限。
1 注塑工艺流程及软件介绍
1.1 注塑工艺流程
注塑机的结构组成可以分为液压油缸、料斗、料筒、加热器、螺杆模具和合模系统,如图1所示:原材料由加料斗注入料筒中;液压油缸作为注射系统推动着料筒里面的螺杆往前挤压,料筒周围为发热圈,经过两百多摄氏度的高温,将原材料融化成胶,由螺杆挤压到模具里面成型,在模具周围有冷却系统,提高了生产效率;合模系统必须保证模具能够可靠地启闭,为了顺利脱模取出制件,合模系统包含有以气压、液压或机械作为动力的制品顶出装置。
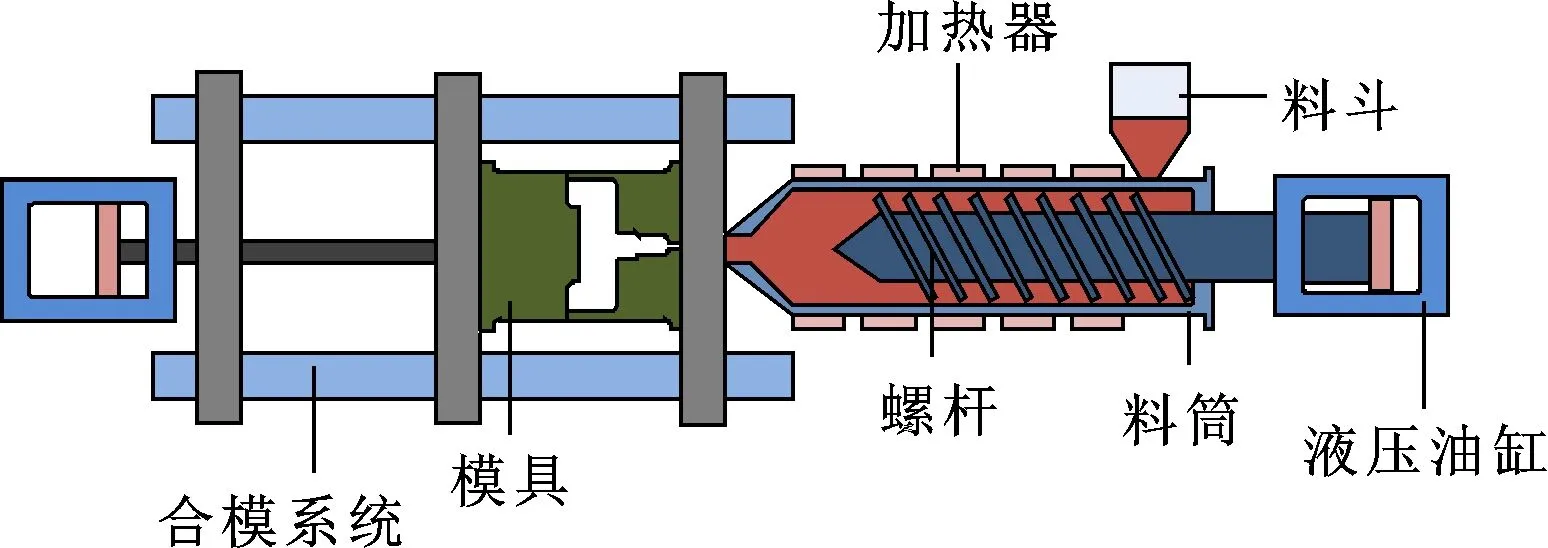
图1 注塑机结构
1.2 软件介绍
系统软件主要包括LabVIEW 2019、AMESim 2019。其中AMESim用于搭建注塑机液压系统仿真模型,通过LabVIEW Cosim接口与用LabVIEW编写的人机界面进行数据传输。
1.2.1 AMESim
AMESim作为一款优秀的建模仿真平台,通过搭配不同的元件库来搭建多学科领域复杂系统,拥有一套应用库,用于针对不同领域系统,内置4 500多个专用元件模型,这些专用模型包含液压、机械、热力学等多个学科领域;与其他相似的系统仿真软件相比,AMESim采用了组合界面设计,具有直观图形的界面,可实现面向原理图建模,软件中每个元件都可以传递数据,有单向传递,有双向传递,且这些变量都是有物理意义的,一个接口可以传递多个变量,能够将不同领域的元件连接起来,大大降低了建模难度。
本文作者搭建液压系统仿真模型使用的是AMESim 2019版本,使用时包含草图、子模型、参数和仿真这4种工作模式。
1.2.2 LabVIEW
LabVIEW软件是一种程序开发环境,由图形化编辑语言G编写程序,表现形式为程序框图。通常用于构建图形界面、管理数据采集卡、流程、实时基准等。本文作者使用的是LabVIEW 2019版本。
1.3 联合仿真接口介绍
AMESim和LabVIEW进行联合仿真时,必须满足以下条件:AMESim需要LabVIEW仿真模块的许可;LabVIEW包含DAQ模块、实时模块、控制设计和仿真模块;AMESim必须使用微软编辑器进行配置,且该界面只在Windows平台可用。
AMESim软件提供了两种与LabVIEW进行联合仿真的方法:一种是名为“LabVIEWCosim”的接口。AMESim通常生成一个可执行文件,运行该文件来模拟一个模型。在运行仿真中,AMESim生成一个动态链接库,其中包括用AMESim建立的模型和AMESim求解器。该动态库有以下功能:初始化模型、设置输入和检索输出、终止模拟。联合仿真时,AMESim和LabVIEW之间正确的输入输出关系如图2所示。
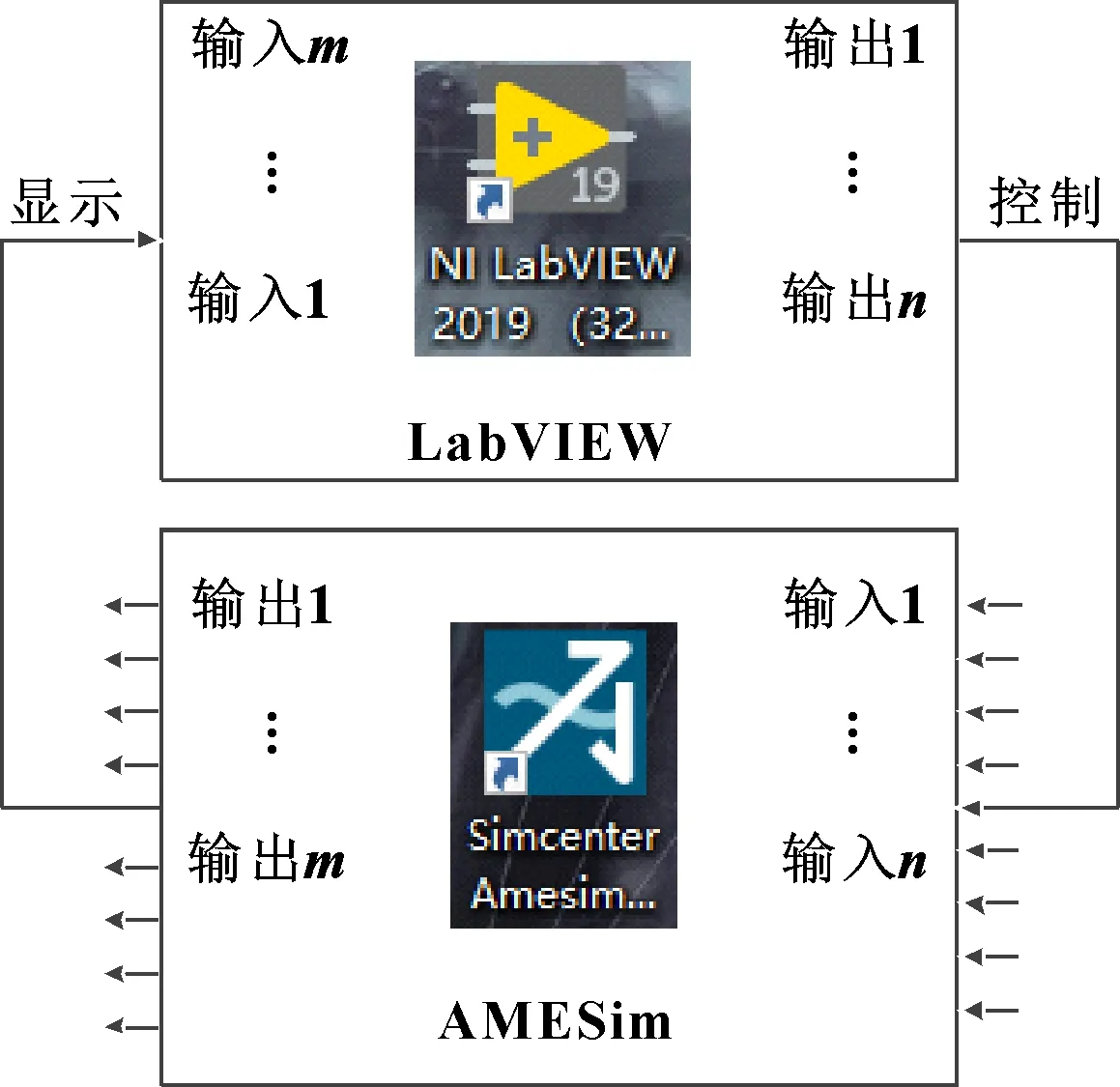
图2 AMESim与LabVIEW联合仿真输入输出关系
另外一种仿真方法就是通过“LabVIEW Simulation Module”。要通过该接口来实现仿真,LabVIEW配置时还需要一个附加模块-“仿真模块”。本文作者采用第一种方法进行仿真。
2 系统总体设计
远程监控系统是针对注塑机现场监控、解决维护不及时,耗费人力、物力、财力等问题提出的,利用网络技术对注塑机现场实现远程监控,将传统的触摸屏监控改进为访问云端服务器来进行监控管理。
由于实验时采集实际注塑机的数据不够便捷,通过AMESim软件搭建仿真模型模拟注塑机液压系统的工作过程,提供工艺流程中的压力、速度等参数,再通过LabVIEW软件搭建服务器监控平台,在此基础上利用LabVIEW和AMESim进行联合仿真,实现监控,并通过内网穿透技术实现真正意义上的远程访问控制。系统的总体结构图如图3所示。
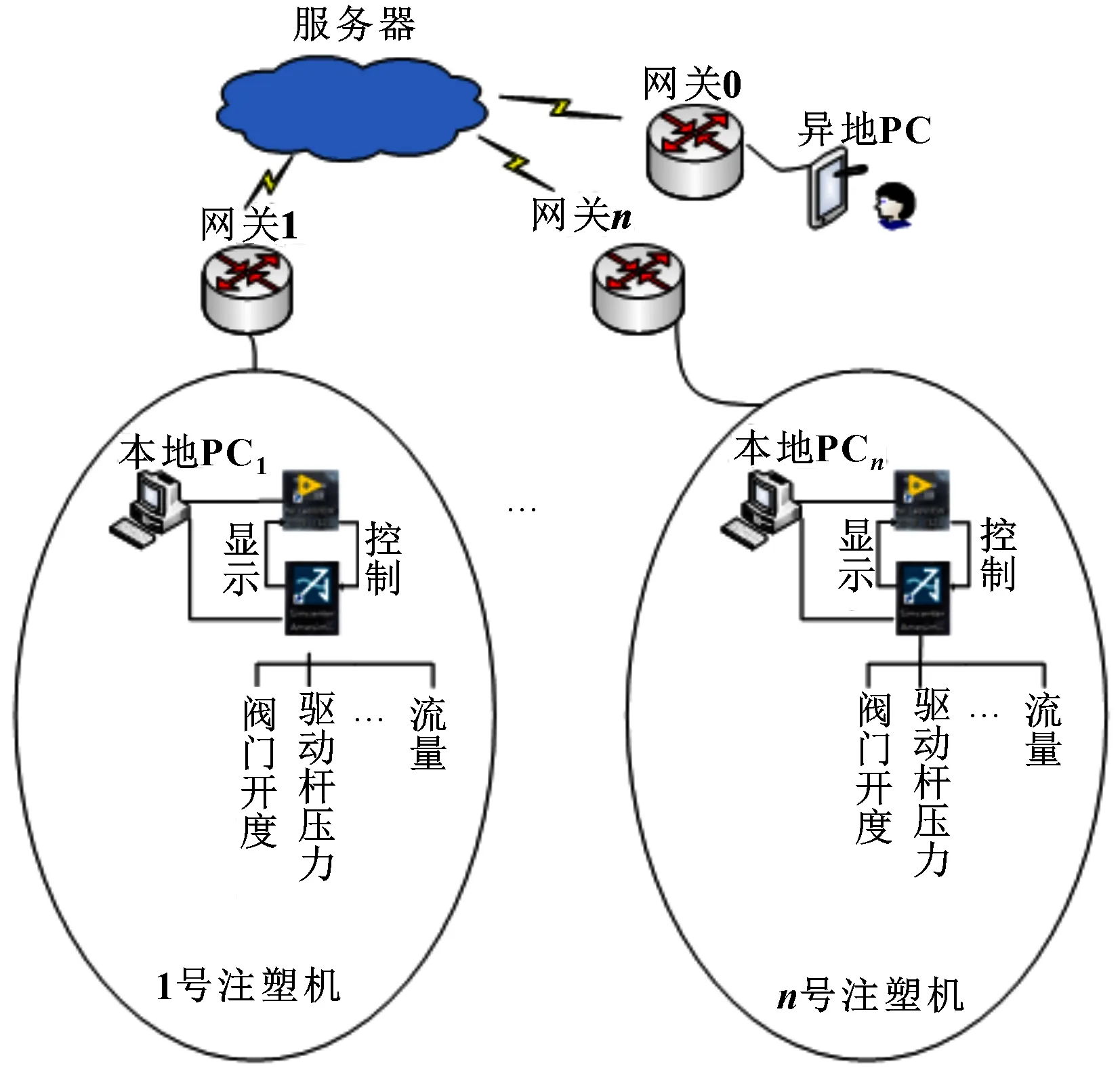
图3 监控系统总体结构
3 监控系统设计
本文作者对注塑机中的液压系统进行仿真。液压系统主要分为主回路、执行回路和辅助回路系统。电机带动泵,把机械能转换为液压能,再通过控制阀和油缸相结合,把液压能转换为机械能,驱动负载进行直线或高速回转运动,并且通过对控制阀进行操作可以实现对流量的调节。LabVIEW监控平台通过调用AMESim提供的子VI,编写逻辑,添加控件,进行设计,最后通过内网穿透技术实现两个内网之间的远程通信。
3.1 仿真模型的建立
根据实际液压系统的控制原理和参数,从AMESim提供的不同库中选择相应所需的部件,如“Signal,Control”、“1D Mechanical”和“Hydraulic”等库,用于建立仿真模型。在建立的仿真模型中,元件需要与实际系统相对应,必须保证仿真模型与实际系统的相似性,也有效降低了建模难度。因此,可以在组件模型的准确性和整个系统的复杂性之间取得平衡。
AMESim建立液压系统仿真模型的操作步骤如下:
(1)启动AMESim,菜单窗口为空白,此时需要新建空白项目,操作界面处于草图模式。
(2)在草图模式中,使用元件搭建系统草图。首先从“Library Tree”板块选择搭建模型所属的库项目,液压系统使用到的元件库有:“Signal,Control”,“Hydraulic”和“1D Mechanical”。液压类仿真需要设置指数液压特性子模型,即需要液压库中的“Elementary Hydraulic Props”元件,在有液压模块使用的情况下必须添加,并选择所需的阀门、油缸、电机等仿真元件来搭建液压系统模型。元件摆放设计可以通过旋转和翻转来实现,将元件从库中拖出放置在工作空间中,双击鼠标左键选择该元件,点击滚轮中键实现90°旋转,右键翻转元件。
连线时要注意“因果关系”,也就是相互连接的元件外部变量之间的匹配关系,一个元件要通过外部端口从另一个元件索取计算所需的变量,同时也通过外部端口给予另一个元件计算所需的变量。相互连接的元件,本质上是各取所需、互利共存的关系。一般情况下,两个元件要想相互连接,在连接端口处,一个元件的输出变量必须至少包含另一个元件所需的全部输入变量。通过右击该元件,选择“External variables”查看元件外部变量,从而获取连接规则信息。
(3)进入子模型模式之前要保证回路完整,所有元件的端口都已连接好,不再高亮提示。子模型模式是设置草图的数学模型,进入后会发现其中部分元件会高亮提示,意味着该元件有超过一个可选的子模型。左键双击元件,弹出窗口显示可用子模型列表,选择需要的子模型。
(4)参数模式是用来设置草图里面每个元件的参数,左键选中该元件,软件界面上会显示参数编辑窗口,在参数行设置数值。
(5)进入仿真模式,依据需要对仿真参数进行设置,可以更改动态参数,如时间和写入结果文件的时间间隔、求解器的类型、运行类型等。设置结束后运行仿真。
设计的液压系统仿真模型如图4所示。

图4 液压系统仿真模型
在图3的基础上,需要添加LabVIEW Cosim接口,才可以实现与LabVIEW的连接通信。该接口,一方面使用AMESim的算法驱动仿真模型,另一方面使用LabVIEW平台传输输入、输出数据,通过LabVIEW中丰富多彩的控制和显示组件增强可操作性和可视化。
在草图模式下,选择“Create Interface Block”创建接口,接口类型选择“LabVIEWCosim”,配置输入、输出数量。由于联合仿真时,软件之间传递的都是无量纲的数字,而不是物理量,因此需要传感器进行转换,并且要注意添加元件时满足匹配关系。联合仿真的系统模型如图5所示。
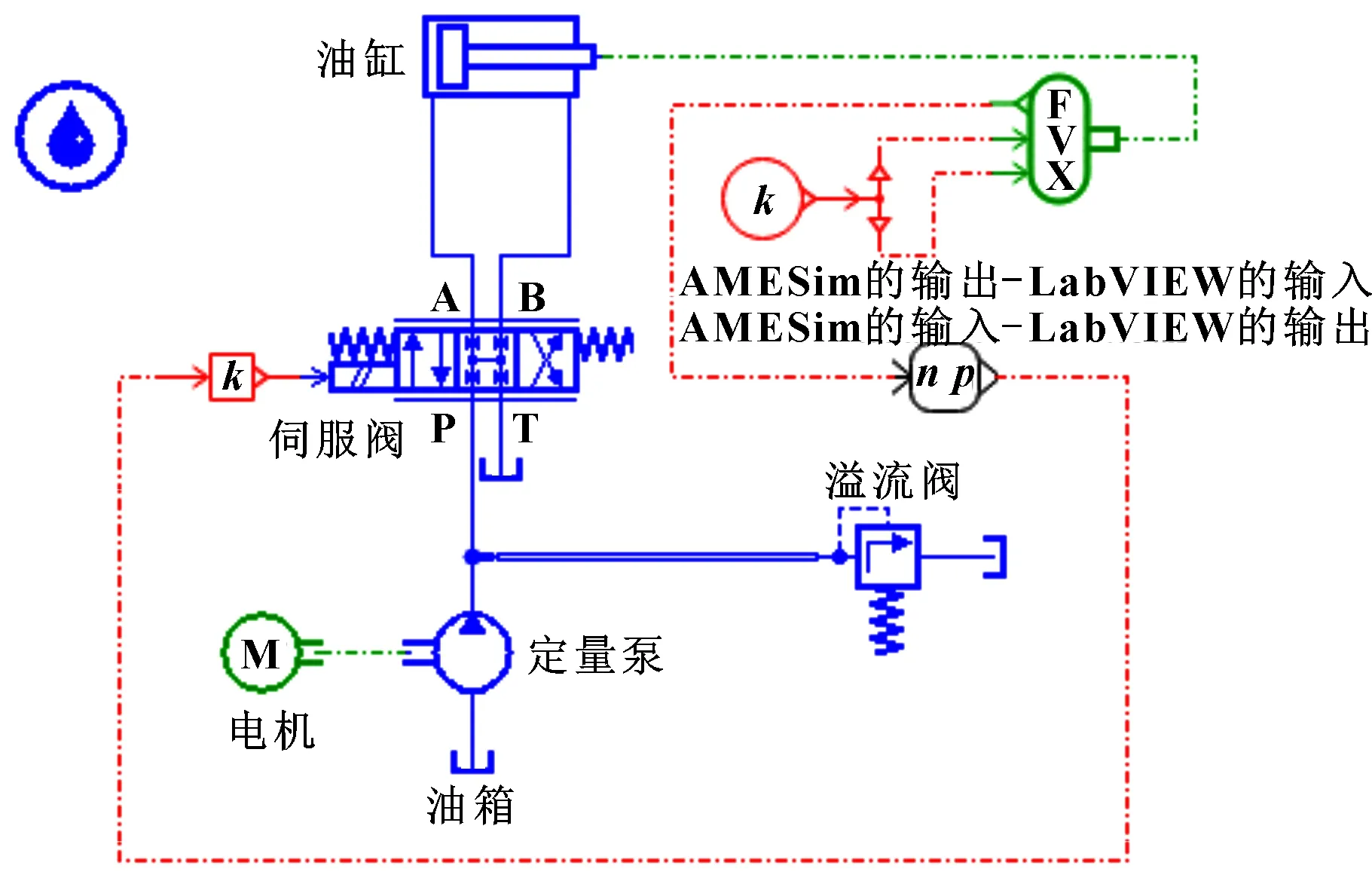
图5 联合仿真系统模型
3.2 LabVIEW监控平台设计
打开LabVIEW 2019,创建一个空白项目,右键“我的电脑”,点击新建VI,AMESim中提供了LabVIEW所需的子VI文件,使得LabVIEW可以调用dll的3个主要函数。这些VI在AMESim的安装路径里,C:Program FilesSimcenter2019.1Amesiminterfaceslabview文件夹中的amesimcosim.llb库文件中,在程序框图中右键面板空白处,选择VI,通过上述路径找到.llb库文件,分别打开AMEinit.vi、AMEInstantiateModel.vi、AMESetCurrentWorkingDirectory.vi、AMETerminate.vi。对系统的逻辑进行设计,设置好仿真模块相关的时间、步长等参数,选择合适的求解器类型,添加AMESim的输出和输入变量。dll文件打开的设计如图6所示,在程序框图中添加输入、输出变量(以调节伺服阀的开口大小举例说明)。
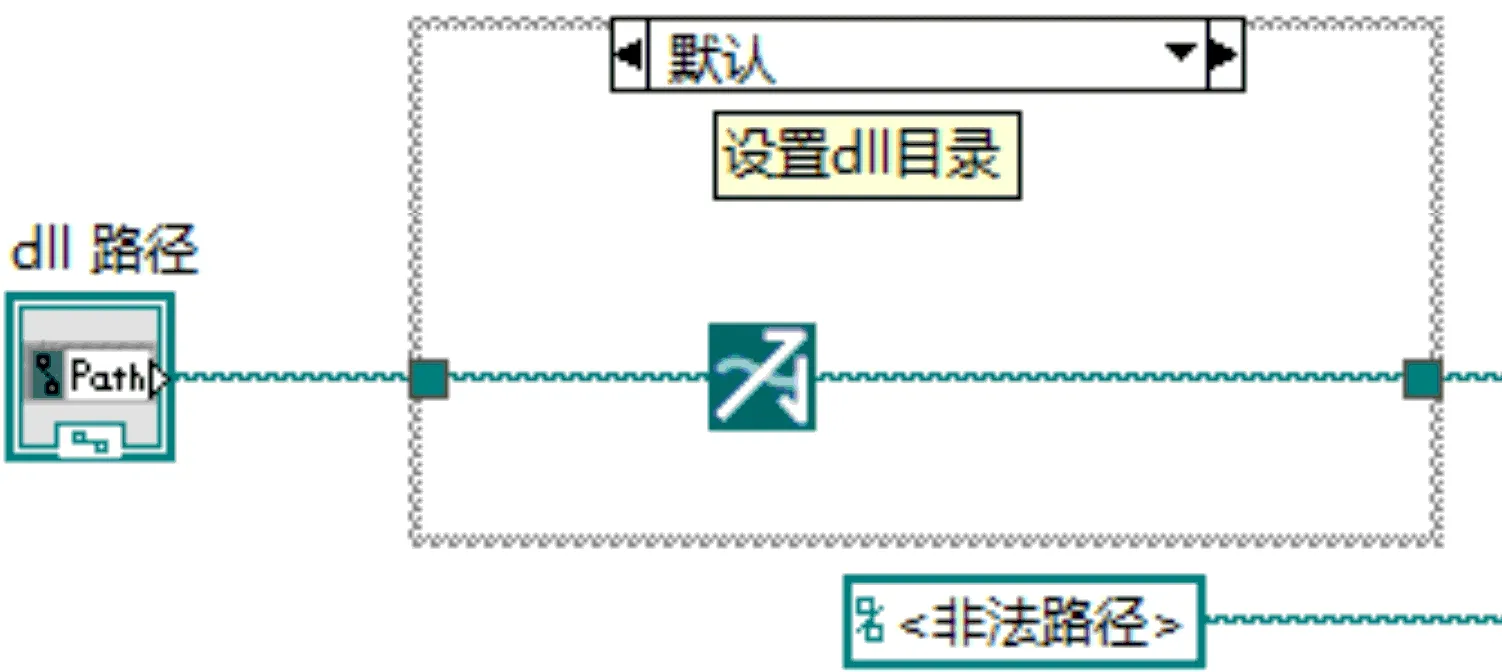
图6 打开dll文件
液压监控系统人机交互界面主要包括主界面、实时报警等,部分界面如图7所示。
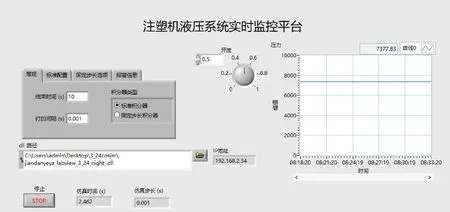
图7 远程监控前面板界面
3.3 内网穿透实现远程控制
由于无法保证工人可以随时待在主控室,在外地使用的计算机和主控室的计算机网络并不在同一个网段内,内外网无法直接连接,但是又需要进行远程的访问控制,使用内网穿透技术可以解决这个问题,从而实现在两个不同内网之间的通信。
内网穿透的目的就是从外网访问局域网内部某一个联网的设备,本质上就是将内网和外网打通,让内网的数据可以被外网获取。局域网计算机只有私有IP,而私有IP无法出现在互联网上。路由器上的NAT系统可以将私有IP转化为合法IP地址,同时分配连接端口,建立两者的映射关系。通过user1连接外网服务器,打通user1的对外IP和端口,user2同理进行操作,之后通过各自已经打通的对外IP和端口实现通信。
假设现在有内网LA和内网LB,两个不同的内网之间由于都不清楚对方外网的地址所以无法连接。此时再加上一个外网服务器,LA先通过NAT A连接外网服务器,LB也通过NAT B连接上该服务器,由于一个socket只能给一个socket发东西,所以只能通过外网服务器不断地转发。LA发起请求建立的信息,当数据包进入路由器之后,路由器会自动分配一个端口,该端口与LA进行映射;当外网服务器收到NAT A发送的信息之后,会把该会话的所需属性和配置信息都保存下来;可能NAT B也在给服务器周期性地发送信息,此时服务器给NAT B发送通知,让它给NAT A发探测包,判断连接是否断开;NAT B在发送之后会给服务器一个反馈,证明已经向NAT A发送过探测包,外网服务器再将反馈包转发给NAT A,NAT A接收到之后就可以向NAT B发送数据包了,连接此时便被打通,实现了内网穿透。两个内网连接的示意如图8所示。
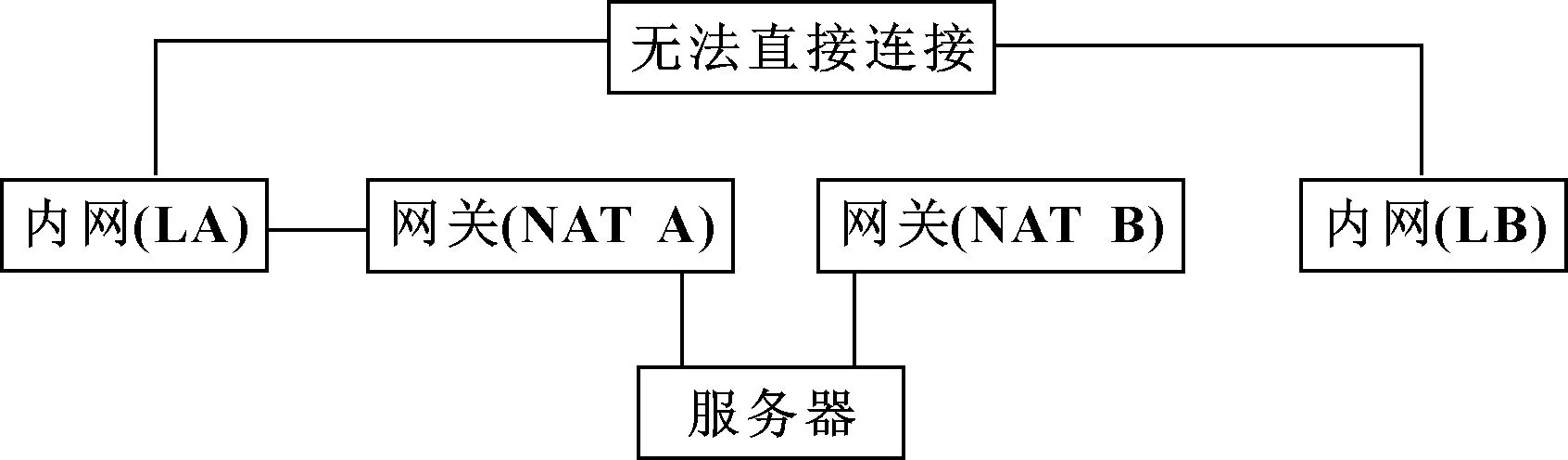
图8 内网连接示意
为实现该系统,选择多台 300 Mbps 企业级路由器,分别作为主站和多台从站,远程监控设备接入主站,对外通信网关为192.168.10.1;智能监控平台和仿真模型的控制都接入各个从站内网,对外通信网关为192.168.2.1、192.168.0.1等;从站下设备网段为192.168.2.X、192.168.0.X。为方便远程访问,可使用客户端通过系统账号远程访问系统,IP地址由主站分配,网关为主站192.168.10.1。远程前面板可以将 LabVIEW 程序前面板发送到网络中,通过 IP 地址加项目名称的方式进行访问操控等。
LabVIEW实现远程前面板的搭建步骤:
(1)使用 LabVIEW远程前面板,需先启动LabVIEW自带的Web服务器功能。打开LabVIEW,选择工具→选项→Web服务器,勾选“启动远程前面板服务器”,文件保存根目录为C:Program Files(x86)National InstrumentsLabVIEW 2019www,HTTP端口选择8000;
(2)打开项目主程序,在工具栏选择“工具”→“Web发布工具”,进入Web发布工具界面,选择需要发布的VI程序。查看模式分为3种:内嵌、快照和显示器。要实现远程并实时地进行查看控制,需要选择内嵌模式,内嵌模式下方包含一个“连接建立时提交控制请求”的选框,若勾选即可在远程进行控制,若未勾选,则只能查看不能进行控制;此时,点击下一步,由于URL路径是按照文件名自动生成的,所以需要将文件名修改得尽量简短,方便URL路径的简洁化;点击保存至磁盘,即可将网页保存在对应的本地目录中,在弹出的窗口中点击连接,可以在本机浏览器中打开该VI界面;
(3)远程访问程序前面板。将URL地址中的计算机名称部分修改为本机的IP地址,在浏览器中输入修改后的URL地址即可访问项目主程序前面板,并且可以请求控制前面板。
4 系统测试
测试监控系统,需要形成闭环,即LabVIEW服务器可以控制AMESim的参数变化,也同样能显示AMESim的参数波形。这里以伺服阀的开度和油缸内驱动杆施加的压力为例进行说明。
主控室启动模拟,AMESim必须处于仿真模式,以便生成LabVIEW所需的文件。运行AMESim仿真模型,在LabVIEW平台上,dll文件路径选择液压系统仿真模型路径下的对应动态链接库,调整LabVIEW前面板上的时间、步长、间隔等参数与AMESim运行设置的参数保持一致。
经测试,当使用人员不处于同一个内网下时,通过内网穿透技术也能在异地远程查看并控制本机上的LabVIEW VI前面板,从而控制AMESim中的仿真模型。主控室在西安,工作人员在渭南合阳的家中,将家中的路由器和主控室所用路由器进行内网穿透,浏览器中输入相对应IP的URL地址,即可显示主控室发布的VI文件,右键即可请求控制,对开度进行调节,波形图表中也能实时监测到液压系统模型的仿真数据。点击运行,可以看到在开度变化的时候,对应伺服阀的开口大小会发生变化从而影响流量大小,如图9所示。将波形图表横坐标的显示格式设置为相对时间并选好所需格式,运行之后可以清楚观察到与主控室AMESim软件中的参数曲线基本一致,如图10所示。同时测试了如果有多台注塑机模型需要被监控,则都需要进行组网,远程访问时只需要在浏览器中输入对应的不同IP下的URL路径,便可以访问并控制不同内网下的模型,如图11所示。
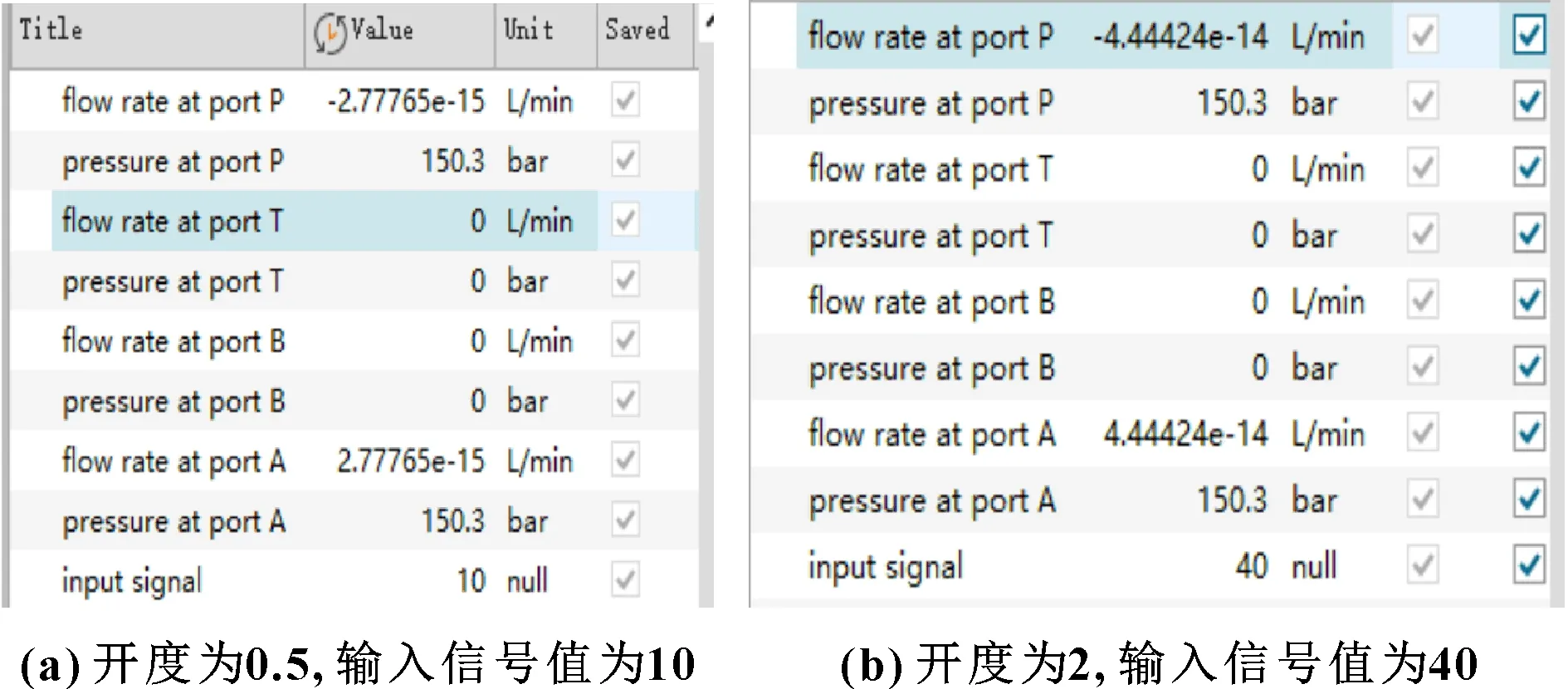
图9 开度对流量大小的影响
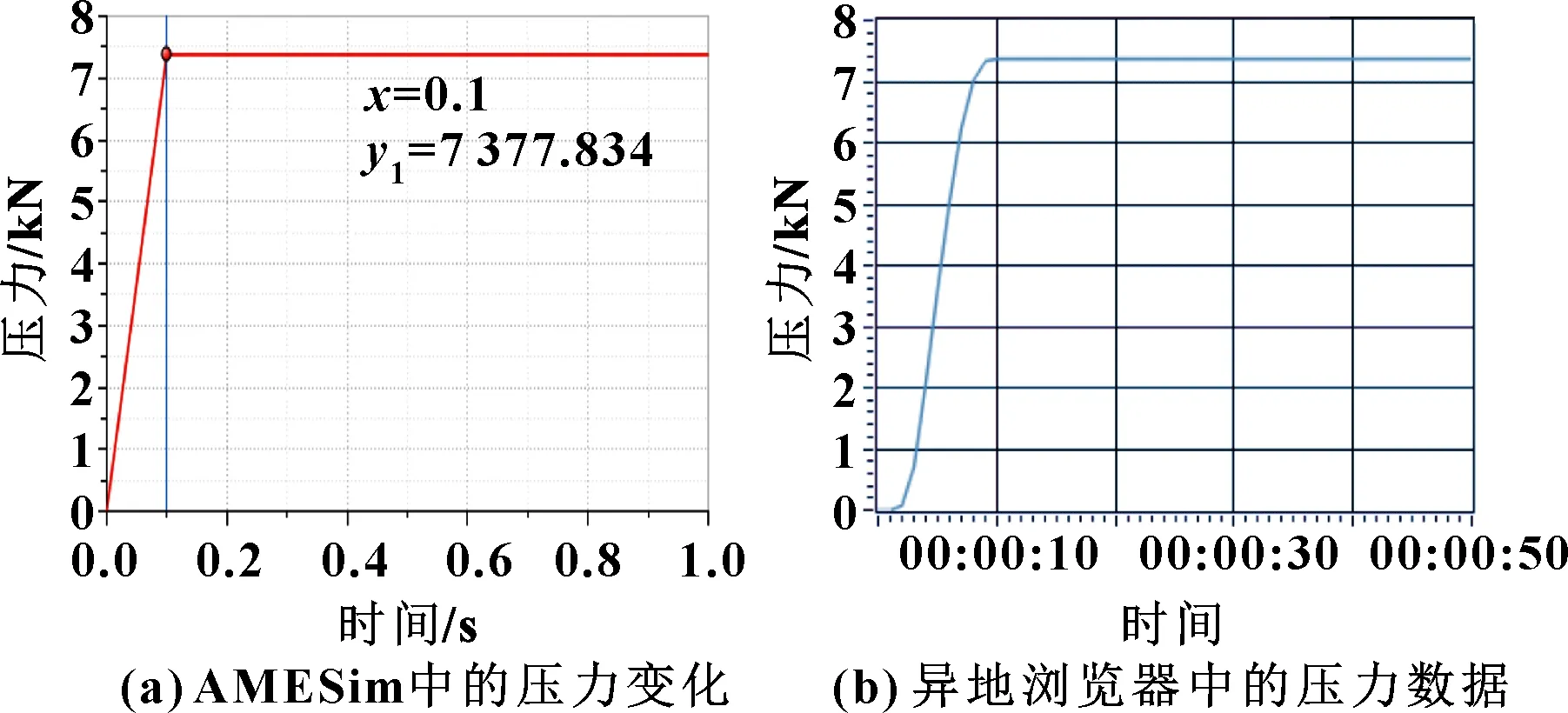
图10 油缸内驱动杆施加的压力变化
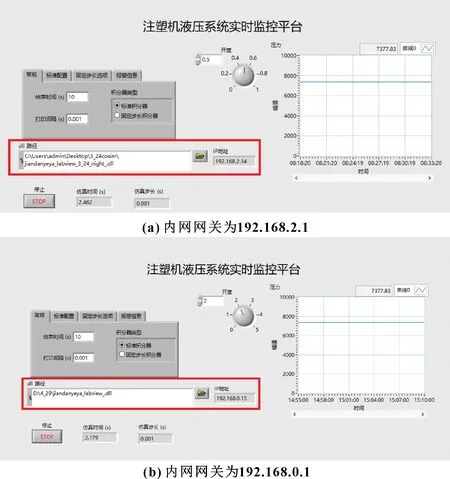
图11 访问不同内网下的远程前面板
从图9可以看出:开度越大,流量越大,也切实体现了LabVIEW通过远程Web对AMESim的控制行为;在图10中,图(a)为AMESim仿真产生的油缸驱动杆施加的压力变化,图(b)为在本地浏览器上监测到的仿真模型的压力数值变化,再实现了本地监控,横轴单位为s,由于AMESim端是0.1 s趋于平稳的,而LabVIEW横轴时间如果精确到ms,刻度值太长不方便观察,因此设置合适的缩放系数使得图表更加美观;在图11中,图(a)和图(b)体现了在浏览器中输入不同IP下的URL路径,便可以访问并控制不同内网下的模型,实现了对仿真模型的远程监控显示。
5 结论
基于仿真的方法是解决无实物或者半实物监控数据缺乏的一个很有前途的发展方向。本文作者在AMESim平台上建立了注塑机的液压系统仿真模型,在此基础上,给伺服阀一个固定的开度值,通过LabVIEW前面板对开度值大小进行调节,利用LabVIEW与AMESim平台,配合LabVIEWCosim接口进行联合仿真。通过内网穿透技术,实现在异地对于本机AMESim仿真模型的监控。仿真结果表明:本文作者提出的方法能够远程且有效获取实时仿真数据并实现闭环控制。文中的工作为无法获取实物数据提供了一种获取实时工况下运行数据的有效途径,并且解决了注塑机维护时维修人员不在现场、维修指令传达不清楚等实际问题,对注塑机的行业发展有一定作用。
猜你喜欢
电脑报(2021年21期)2021-08-19 17:22:40
装备制造技术(2020年3期)2020-12-25 05:21:56
电脑报(2019年29期)2019-09-10 07:22:44
制造技术与机床(2019年6期)2019-06-25 10:17:46
科技资讯(2017年5期)2017-04-12 15:24:45
山西建筑(2016年20期)2016-11-22 03:10:21
科技资讯(2016年19期)2016-11-15 08:17:44
中国塑料(2015年11期)2015-10-14 01:14:23
河南科技(2015年2期)2015-02-27 14:20:27
无线互联科技(2014年7期)2014-09-24 00:07:42
