
基于滑模扰动观测器和积分滑模控制器的活塞加速度控制研究
2022-09-15 09:15杜迎慧李强郗建国
机床与液压 2022年11期
杜迎慧,李强,郗建国
(1.新乡职业技术学院交通学院,河南新乡 274015;2.河南未来机电工程有限公司, 河南郑州 450066;3.河南科技大学车辆与交通工程学院,河南洛阳 471003)
0 前言
流体技术涉及液压和气动技术,已广泛用于各种场合中,如工厂中的重工业设备、机器人、建筑机械以及起重搬运机械。液压系统由不可压缩的流体提供动力,经常用于要求高性能、高精度和高负荷控制的系统中。气动系统利用压缩气体作为工作介质而具有物理意义上的弹性,可以在整个系统中起减振作用。在过去的几十年中,对执行器的控制研究主要在活塞的位置或速度跟踪上,由于极其敏感和高度非线性的系统特性,其加速度跟踪非常困难。因此,设计电液-气动混合执行器系统,建立其数学模型,研究活塞的加速度控制具有重要意义。
文献[2-3]研究了气动执行器的位置跟踪问题,构建了实验模型,给出了系统数学模型,在非线性PID基础上,用粒子群优化算法优化速动率和非线性增益,并加入死区补偿,开发了自调节非线性PID控制器,通过实验证明了该控制器的可行性。文献[4-5]提出了线性自抗扰控制器对气缸进行位置控制,设计实验平台,建立系统动力学模型,设计了线性扩张状态观测器和线性状态误差反馈控制器,并通过实验验证了该控制器的有效性。文献[6-7]研究液压驱动活塞的位置控制,建立了液压缸驱动系统简化示意图,推导系统数学模型,基于神经网络算法和模糊切换规则对滑模控制器进行优化,最后通过MATLAB验证该方案的合理性。目前的研究主要采用单一液压或者气压进行活塞运动控制,而没有将两者结合起来。此外,在复杂的电液-气动混合执行器系统中,执行器位置的准确估计通常较难实现。同时,考虑到系统动力学理论模型难以做到无偏差地体现实物系统,会使外部干扰对系统的影响加剧,最终使控制性能进一步变差。对此,本文作者采用基于滑动扰动的观测器和积分滑模控制器对活塞加速度进行控制。设计电液-气动混合执行器系统,建立电液-气动混合执行器系统动力学模型。在积分滑模控制器的基础上,结合具有基于超扭曲算法估算复合扰动能力的滑模扰动观测器,开发结合了滑模扰动观测器和积分滑模控制器的综合控制器。在MATLAB软件中对活塞运动进行仿真验证,与传统PID控制器仿真结果进行对比,为活塞加速度精确控制提供参考。
1 电液-气动混合执行器系统数学建模
图1所示为电液-气动混合执行器系统简化图。该系统由3个关键子系统构成,分别为气动动力系统、伺服液压系统和机械制动执行器系统。气动动力系统直接驱动气动执行器。伺服液压系统向制动系统提供液压力,以控制活塞的运动。气动系统中的压缩气体使活塞能够在大致不变的压力下正向运动,而液压系统中不可压缩流体的精确交替压力会阻碍执行机构的传动,从而精确控制其加速度。整个系统由工业计算机控制,该计算机接收系统的运行参数并将控制信号发送到具有高频带宽的伺服阀。
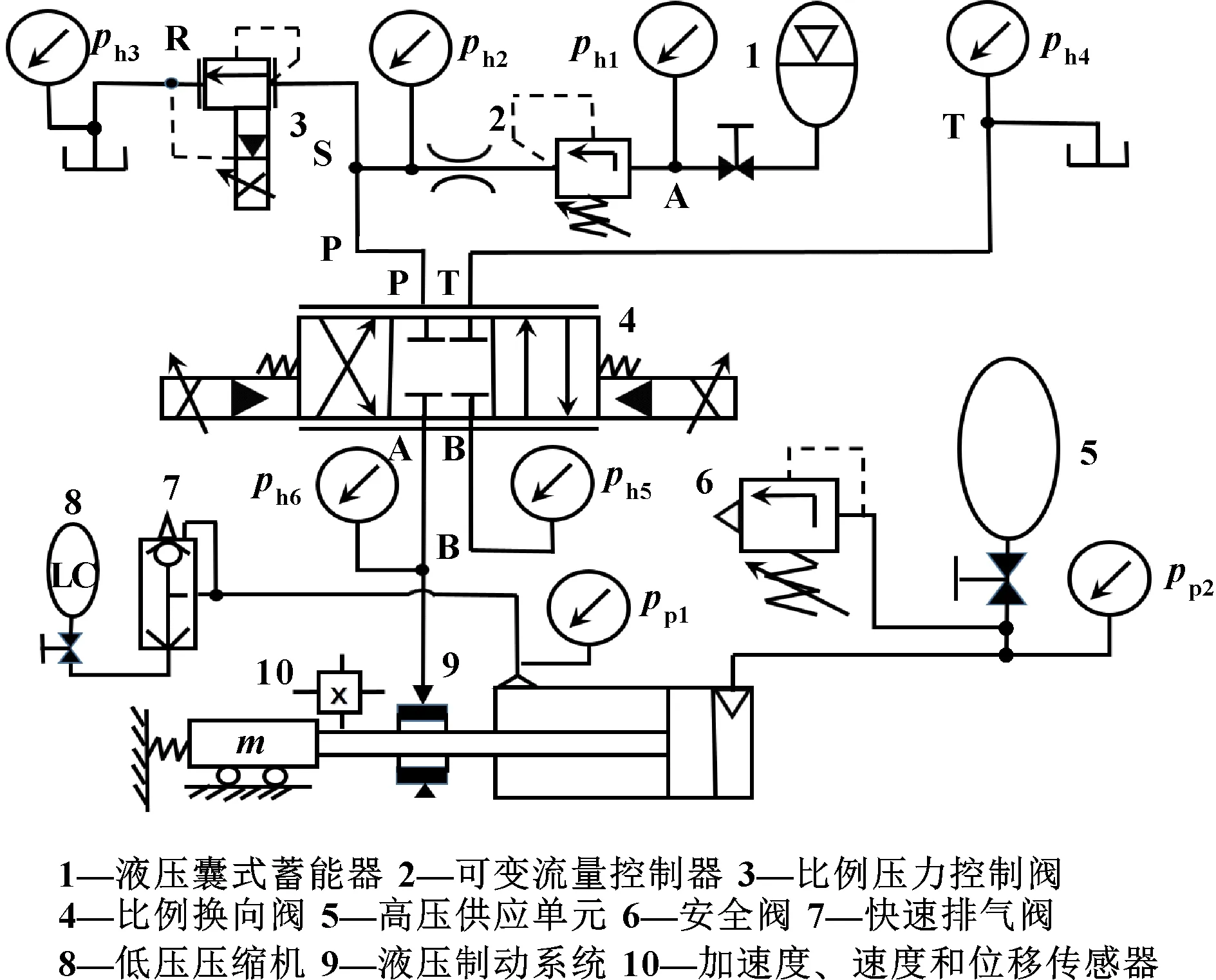
图1 电液-气动混合执行器系统简化图
执行器受到活塞两侧压缩气体、活塞和外部质量块的惯性力以及运动时的约束力等压力冲击。根据牛顿第二定律并将力投射到运动方向,活塞运动的动力学方程为


(1)
其中:和分别为活塞和外部负载的质量;为活塞与气缸之间的摩擦因数;为与对液压系统施加的冲击有关的等效刚度;和分别为活塞运动时的约束力、外部质量块的约束力;和分别为活塞的有效面积和活塞杆的横截面积;为制动腔内的压力;为制动活塞有效面积;为制动衬块和活塞杆之间的稳态摩擦因数;和分别表示摩擦速度指数函数的乘数和参数系数;()为影响活塞运动的复合扰动。
供给压力方程为



(2)
其中:为阀门的排放系数;为可变流量控制器的流通面积;为液压油密度;和分别为比例压力控制阀和换向阀的排放系数;为比例换向阀阀芯直径;为比例压力控制阀阀芯直径;()和()分别为输入信号和的函数;为液压油的有效容积模量;()为可变流量控制器的流量;为液压油的动力黏度;表示从点到比例换向阀的管道长度;为管道的内径。sg()定义如下:
(3)
比例压力控制阀阀芯的动力学方程为

(4)
其中:为阀芯的质量;为阀芯移动时的阻尼系数;为伺服阀复位弹簧的等效刚度;为控制器的输入增益;为阀的输入电压;为来自内部压力与外部压力之差的流体力系数。
比例换向阀阀芯的动力学方程为

(5)
其中:为阻尼比;为伺服阀的固有频率;Δ为压降;为喷射角;和分别为阀芯的直径和出口高度;为比例换向阀控制比例系数。
制动腔内压力的动力学方程为


(6)
其中:为端口A和T连接时比例换向阀的排放系数。
2 控制系统

将每个非线性方程视为单输入单输出系统,一般形式为
⋮

={=,∈[1,],,∈}
(7)
其中:(,)和(,)为非线性函数;()为扰动的有界函数;()为每个系统的输入信号;= [,,…,]。
滑动面定义为

(8)

因此,状态空间中的滑动表面改为


(9)
(10)
一阶时间导数为

(11)
根据方程(7)和(11),得到:

(,)()+()]=-sgn()
(12)
选择综合控制律为


(13)
用如下饱和函数sat()代替函数sgn():
(14)
根据方程(13)和(14),整个积分滑模控制器可以分为三部分:
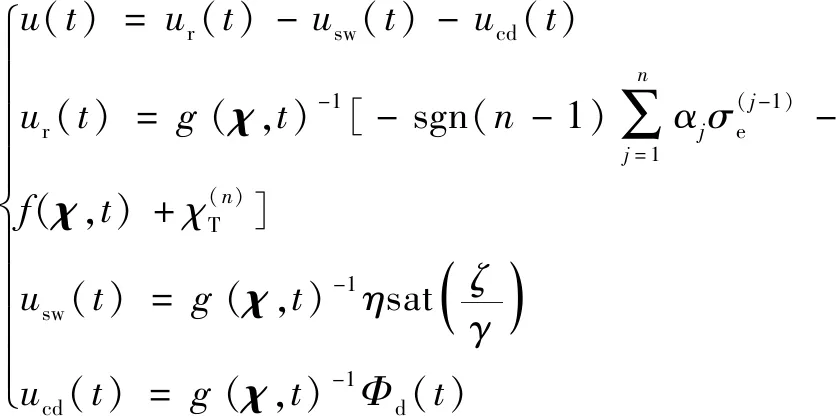
(15)
其中:()用于将系统状态合并到滑动表面;()通过切换律得到;()用于补偿滑模扰动观测器估计的复合扰动。
图2所示为滑模扰动观测器-积分滑模控制器的结构。系统的机械状态参数直接由高阶积分滑模控制器1控制。在输入到机械系统之前,通过滑模扰动观测器将输入信号添加到复合干扰的补偿中。由于式(6)所示的动力学模型中显示的比例换向阀的布置不平衡,开发了开关技术来提供控制信号。该开关技术分别使用基于反向动态模型和正向动态模型的积分滑模控制器2R和积分滑模控制器2F。积分滑模控制器2的指令信号成为积分滑模控制器3的期望值,信号是积分滑模控制器3的指令信号。
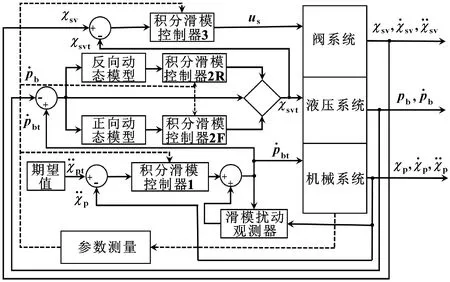
图2 滑模扰动观测器-积分滑模控制器结构
活塞动力学方程(1)的数学模型变为



e- -]
(16)
其中:=1/(+)。





(17)
(18)

(19)
积分滑模控制器3经计算为



(20)


(21)
扰动的非线性微分函数为

(22)
其中:函数()为未知的有界扰动;()为状态变量;和为观测器系数。和的公式分别为
[()]=|()|12sg[()]
(23)

(24)
因此,滑模扰动观测器经计算为
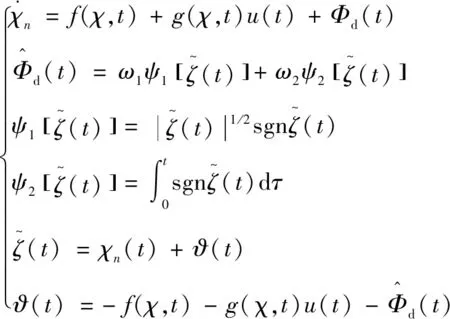
(25)
滑模扰动观测器主要侧重于消除机械系统的干扰。因此,利用滑模扰动观测器-积分滑模控制器控制策略,不仅能克服快速运动过程中系统的极端敏感性,而且还能消除在跟踪快速增益调度的活塞运动时内部参数的不确定性和外部负载干扰。
3 仿真模拟
为验证所设计的电液-气动混合执行器系统的可行性,同时对比传统PID控制器与滑模扰动观测器-积分滑模控制器的控制效果,在MATLAB/Simulink环境下,对电液-气动混合执行器系统进行仿真。仿真参数:=60 kg,=300 kg,=20 N·s/m,=7 450 N/m,=105 N,=86 N,=25×10m,=13×10m,=8.4×10m,=0.44,=0.125,=0.023,=0.65,=880 kg/m,==0.55,=0.005 m,=0.007 m,=2×10N/m,=2.2×10m,=4.22 m,=0.004 m,=0.2 kg,=250 N·s/m,=65 kN/m,=0.04 mm/V,=0.45,=0.8,=10 Hz,=1.22 rad,=6.2 mm,=4.3 mm,=0.25。
无外部干扰情况下,当系统期望加速度响应为方波曲线形响应(幅值40 m/s,频率0.5 Hz)时,传统PID以及滑模扰动观测器-积分滑模控制器的响应曲线如图3所示。可知:电液-气动混合执行器系统采用滑模扰动观测器-积分滑模控制器控制时,超调量小;采用传统PID控制器控制时,超调量增加54%,同时达到稳态时间更长。
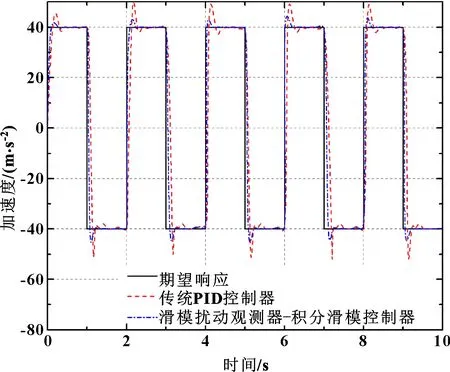
图3 传统PID及滑模扰动观测器-积分滑模控制器控制下的方波响应
进一步验证对不同响应曲线的跟踪效果,期望加速度响应为正弦波形(幅值40 m/s,频率0.5 Hz)时,得到如图4所示的传统PID以及滑模扰动观测器-积分滑模控制器的响应曲线。可以看出:传统PID控制器下的加速度跟踪误差在±2.5 m/s之内;滑模扰动观测器-积分滑模控制器下的跟踪误差减少约65%。
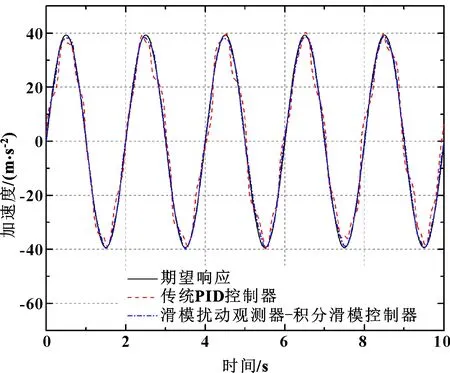
图4 传统PID及滑模扰动观测器-积分滑模控制器控制下的正弦响应
为验证所设计的滑模扰动观测器-积分滑模控制器的抗干扰性能,在正弦响应下,分别在2、4.2以及7.1 s对系统施加一个随机干扰,结果如图5所示。可见:滑模扰动观测器-积分滑模控制器下的加速度曲线在随机干扰下的误差和偏移比传统PID控制器的小,同时其消除干扰影响的时间明显变短。
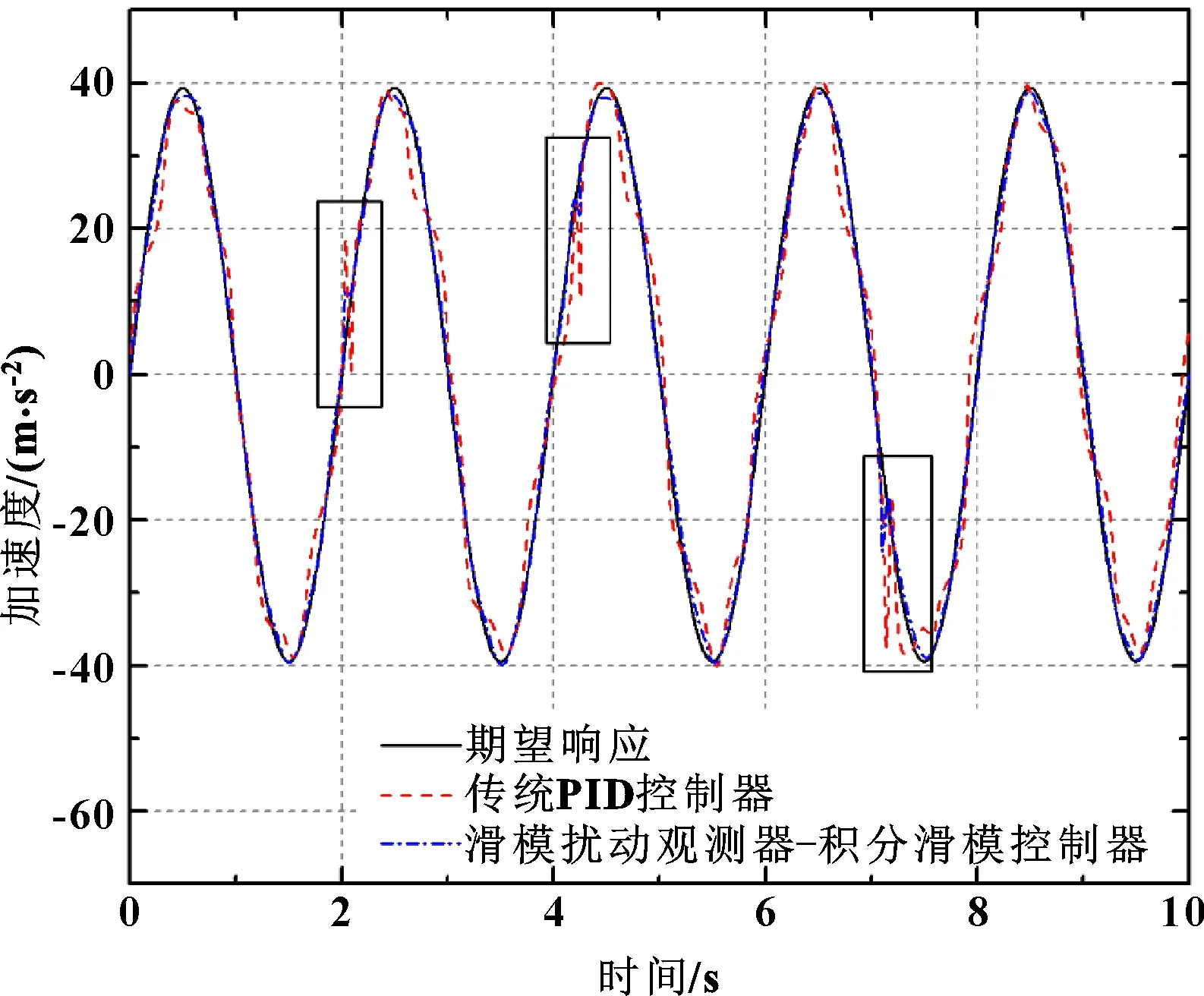
图5 随机干扰下的活塞加速度响应
为验证滑模扰动观测器-积分滑模控制器对活塞位置的跟踪效果,在上个实验的基础上进行测试,结果如图6所示。可以看出:滑模扰动观测器-积分滑模控制器下活塞的位置与期望位置基本一致,在外部干扰作用下,活塞位置波动较小。
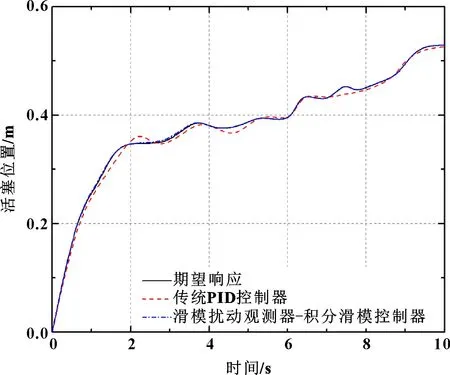
图6 活塞位置响应
因此,采用滑模扰动观测器-积分滑模控制器的电液-气动混合执行器系统,可补偿扰动并精确跟踪活塞的加速度和位置。
4 结论
本文作者结合单一液压和气动技术的优点,设计了用于活塞加速度控制的电液-气动混合执行器系统,构建了电液-气动混合执行器系统简化模型及建立电液-气动混合执行器系统动力学方程。在积分滑模控制器的基础上,添加了用于消除机械系统干扰的滑模扰动观测器。在MATLAB中对活塞加速度以及位置进行仿真验证,并与传统PID控制器的仿真结果进行对比。结果表明:采用基于滑模扰动观测器和积分滑模控制器的活塞,不仅加速度跟踪精度高、抗干扰性强,同时位置跟踪误差小。研究结果可为活塞加速度控制的研究提供参考。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
上海师范大学学报·自然科学版(2022年3期)2022-07-11
西部交通科技(2022年2期)2022-04-27
计算技术与自动化(2022年1期)2022-04-15
汽车实用技术(2022年5期)2022-04-02
科技风(2021年10期)2021-04-18
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
科学导报·科学工程与电力(2019年44期)2019-09-10
河北渔业(2014年11期)2014-11-17
