工业打磨机器人在轧钢平整机上的设计应用*
2022-09-14 09:21赵亚楠陈发林陈代兵赵学敏
机械研究与应用 2022年4期
赵亚楠, 陈发林, 陈代兵, 赵学敏
(1.酒泉钢铁(集团)有限责任公司 信息自动化分公司,甘肃 嘉峪关 735100;2.甘肃酒钢集团宏兴钢铁股份有限公司,甘肃 嘉峪关 735100)
0 引 言
随着国家对钢铁工业转型升级的迫切需求,各个钢铁公司对钢产品结构进行了大规模调整。近年来,超纯铁素体钢产品需求量不断增加,而常规钢种大幅缩减,这导致在对钢种及超纯钢进行平整作业时,在线或平整机钢辊缺陷发生率明显提升。当平整辊产生缺陷时,为控制并消除缺陷,需要操作人员手动对高速工作辊进行打磨。而人员手动打磨具有时效性差,打磨效果不佳,缺陷不能及时消除等问题,从而导致含有缺陷的钢辊继续工作,从而使生产的钢板表面出现瑕疵,进而出现产品质量下降甚至降级的风险,严重影响企业声誉。而且人员手动打磨工作辊时,离运行的设备较近,手部直接接触高速转动的工作辊,危险系数较大,存在很大安全隐患,一旦发生生产事故,后果极为严重。
近年来,工业机器人技术发展迅速,它作为一种高端的装备,在不同的生产线中得到了广泛的应用[1-2],由于PLC的稳定性、灵活性和抗干扰性好,PLC常常应用于机器人控制系统设计过程中[3-5]。笔者以平整机工作辊表面瑕疵打磨作为研究内容,对平整机工作辊打磨工作流程进行分析,设计了一套基于PLC与工业机器人的打磨工作站控制系统,并在某大型钢厂的平整机上进行了打磨应用,实践验证了打磨工作站取得了良好的打磨效果。
1 系统构成及工作原理
打磨机器人工作站由工业机器人、电气控制系统、自动更换砂纸装置、力控系统、现场监控系统、除尘装置组成。根据平整机机组所在空间位置的实际情况、打磨系统载荷重量等因素选用了ABBIRB-6700机器人,其有效工作半径3.2 m,承重150 kg,具有机身紧凑,工作范围大,操作速度快等特点。电气控制系统以西门子 S7-1200 PLC 为核心,系统具备更快的处理速度,更强的诊断能力以及更高的安全可靠性,可有效提高工作效率。自动更换砂纸装置由主体箱、撕砂纸机构、砂纸检测传感器、砂纸库和控制盒组成。力控系统由浮动单元、伺服阀、控制器和打磨头组成,该系统主要目的是实现打磨过程的自动、恒定的打磨压力。工业机器人工作时通过机器人控制器和PLC之间的ProfiNet总线连接,来完成机器人在平整机工作辊上的运动轨迹控制的指令传输和人机交互。
根据工作空间和生产流程,打磨机器人工作站的系统仿真如图1所示。其工作原理如下:取砂纸工作时,PLC系统先进行程序初始化,不同的砂纸放在对应的砂纸库,机器人接收到PLC 发送的取砂纸信号(包括取砂纸的类型和取砂纸的启动信号)后启动执行换砂纸程序,砂纸更换成功或取砂纸失败三次,机器人自动回原位,并向 PLC 反馈信息;打磨工作时,机器人的打磨模式分为离线打磨模式和在线打磨两种,离线打磨时,首先将平整机启动到最大速度200 m/min并将平整工作面抬升至固定高度,启动前PLC系统先进行程序初始化,机器人接收到 PLC 发送的离线打磨启动指令后(启动指令中包括人工在PLC界面设置的机器人打磨起点坐标、终点坐标、打磨速度、打磨力度等信息),机器人从初始位置启动,通过程序设定的路径到钢辊打磨的起点,开始对平整机工作辊以设定的恒定力进行直线式移动打磨,直到机器人接收到停止打磨信号,机器人则以原路径返回起始点。在线打磨和离线打磨相似,区别是离线打磨时工作辊抬升到固定高度,不进行平整生产作业,而在线打磨时平整机同时也在进行平整作业,平整机的工作速率随生产工艺要求不断变化,工作辊的位置也处于工作高度,因此离线打磨和在线打磨时机器人的打磨路径稍有区别。
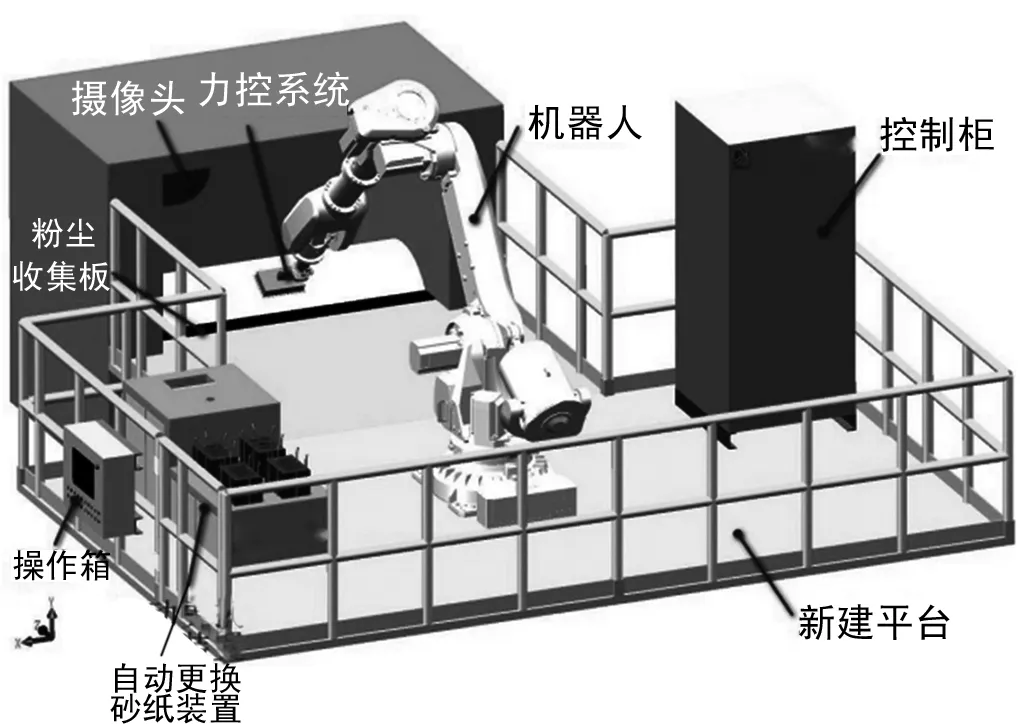
图1 系统仿真图
2 控制系统的硬件设计
打磨工作站控制系统硬件主要包括PLC、机器人控制器、HMI触摸屏、砂纸举升气缸、电磁阀和传感器、监控设备、力控系统等,其电气硬件设计结构图如图2所示。在整个控制系统中,PLC和机器人控制器IRC5是整体系统的控制核心单元,机器人采用ProfiNet总线与PLC通信,完成接收和采集以及相应外部控制信息的工作,实现机器人打磨启停、砂纸更换、参数设置、打磨状态监控等。
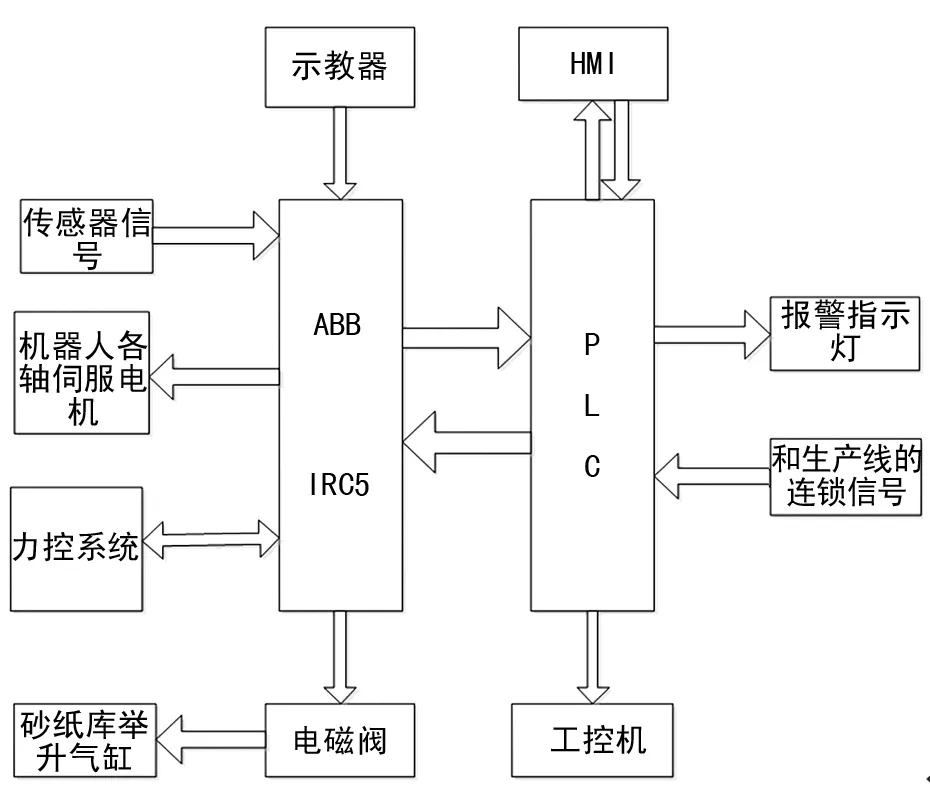
图2 硬件设计结构图
控制系统硬件选型如下。
(1) 机器人控制器:采用 ABB 第五代机器人控制器IRC5,其拥有卓越的运动控制功能,配备有含触摸屏和操纵杆编程功能的 FlexPendant 示教器、灵活的 RAPID 编程语言及强大的通信能力[6],控制器选用带ProfiNet总线接口的模块,方便与PLC进行通信。
(2) PLC控制器:采用西门子S7-1200系列的1214C,该PLC自带ProfiNet通讯接口,方便与机器人控制器通讯,实现电磁阀、生产线连锁信号、传感器等信号的控制和信息处理。
(3) HMI人机界面:采用西门子 9寸触摸屏,可以与西门子S7-1200 PLC集成连接,实现工业机器人工艺参数的设置和监控功能。
(4) 力控系统:采用DFRC1201的力控系统,支持20~120 N恒力控制及0~30 mm伸缩量,打磨力值在±2 N内浮动,能在精细的操作中保证快速的响应时间以及高度的时效性。
(5) 工控机:采用研华控端 IPC-610 小型工控机,支持以太网通信模式;工控机实现上位机对力控系统的监控,并对实时打磨力值进行记录,便于现场人员对打磨效果进行分析,为后续打磨力值设定起到参考作用。
3 控制系统的程序设计与运行
3.1 控制系统的程序设计
打磨工作站控制系统的程序设计主要包括PLC程序设计和机器人程序设计。根据打磨工作站的工作原理,机器人依次进行末端力控系统准备、砂纸到位准备、砂纸更换、机器人按照预定路径移动到打磨起点位置处、在设定的打磨区间内进行打磨、打磨结束后按原路径返回原始位、整个打磨系统程序的设计包括工业机器人和控制系统初始化、工作人员在HMI上设置工艺参数、系统自动运行、输入输出I/O信号监控系统等,程序流程图如图3所示。
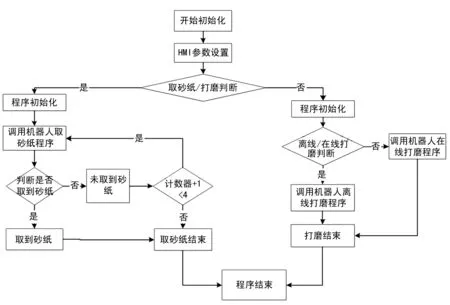
图3 工作站程序流程图
控制系统的程序设计内容如下。
(1) 控制系统初始化:在HMI中选择一键初始化或选择逐个模块初始化,打磨工作站机器人控制系统按照一定的顺序运行到初始化状态,使工作站恢复到原始状态,工作站准备完成。
(2) HMI工艺参数设置:根据打磨对象和工艺要求,在HMI人机界面中设置相对应的参数,机器人程序会根据参数自动设定初始值,以满足设备生产的稳定性。
(3) 系统自动运行:当参数设置完成以后,将工业机器人工作站系统设定为自动运行状态,工业机器人自动完成砂纸的换取,工作辊的打磨、除尘,最后回原位。整个系统的启动和停止由触摸屏上的启停触点控制,控制柜上安装有紧急停止按钮,便于紧急停车。
(4) 输入输出I/O信号监控系统:通过对信号监视可以监控系统的运行情况,主要有机器人的运行速率、力控系统的反馈力值大小、机器人的打磨区间等,使整个生产过程处于控制中。
工业机器人控制程序的设计采用ABB工业机器人的RAPID编程语言,整个系统设计包括主程序设计和子程序设计,子程序设计包括选取不同砂纸库的程序、离线打磨程序、在线打磨程序、中断程序等功能模块,主程序设计通过程序初始化、打磨或换砂纸判断,子程序调用等实现打磨功能和运动轨迹的控制,机器人打磨主程序如下所示:
MODULE Main_Job
PROC main() // 主程序
initialize; // 程序初始化
Pro_Main:
IF Q26=1 AND Q90=0 THEN // 选择取砂纸
SetDO I680,0; // 置位机器人启动信号
Discharge_Paper; // 执行撕砂纸
IF Q20=1 THEN // 选择1号砂纸
Pick_Paper_Job_1; // 取1号砂纸
endif
IF Q21=1 THEN // 选择2号砂纸
Pick_Paper_Job_2; // 取2号砂纸
endif
IF Q22=1 THEN // 选择3号砂纸
Pick_Paper_Job_3; // 取3号砂纸
endif
IF Q23=1 THEN // 选择4号砂纸
Pick_Paper_Job_4; // 取4号砂纸
endif
ELSEIF Q26=0AND Q90=1 THEN // 选择离线打磨
SetDO I680,0; // 置位机器人启动信号
robotStopTrap; // 执行中断程序
Go_Polish_Up; // 执行离线打磨
GOTO Pro_Main;
ENDPROC
PLC控制程序采用西门子博图15编写,对砂纸库的选择、机器人的打磨速率、力控系统的力值大小、机器人的打磨区间、机器人的启动停止、打磨工作站与生产线的连锁等进行控制,软件集成了PLC程序开发和上位机画面开发,PLC监控画面如图4所示。

图4 PLC监控画面
3.2 工作站控制系统的运行
机器人离线打磨如图5所示,以平整机工作辊为打磨对象,整个工作站设置安全门锁、急停按钮进行安全防护。该系统在自动运行时,机器人通过砂纸库快速换取砂纸,对平整机工作辊进行打磨,整个打磨过程工作迅速,运行稳定,满足现场生产的要求。

图5 机器人离线打磨 图6 工件打磨前后
3.3 平整机工作辊打磨前与打磨后对比
工件打磨前后对比如图6所示,可看到打磨效果较为明显。机器人自动打磨可以24 h连续不间歇高速工作,不受任何外界因素的干扰,以设定的速度恒力打磨钢辊,大大提高钢辊的打磨效率,钢辊表面95%的缺陷都能得到及时消除,从而提高了钢辊的平整度,提升了钢板的整体品质,取得了不错的效果。
4 结 语
针对人员手动打磨高速工作辊的问题,设计了打磨工作站控制系统,本系统以ABB工业机器人IRC5和西门子 S7-1200 PLC为控制核心,结合触摸屏、力控系统等智能设备,可以自动完成砂纸换取、工作辊打磨等功能。实际应用证明,该打磨工作站整体运行良好,工作速度稳定,工作速率快,打磨效果明显,可供同行参考。
猜你喜欢
防爆电机(2021年4期)2021-07-28
家庭影院技术(2021年3期)2021-05-21
天津诗人(2020年2期)2020-11-18
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2020年5期)2020-09-21
青海湖(2020年6期)2020-09-07
铁道通信信号(2020年11期)2020-02-07
科技传播(2019年22期)2020-01-14
电子制作(2018年1期)2018-04-04
学生天地·小学中高年级(2017年10期)2017-12-11