高效经济垂直起飞固定翼飞行器设计
2022-09-07 12:00:38李佩琦姜屹洋蔡旭飞
科教导刊·电子版 2022年20期
张 俊,李佩琦,姜屹洋,蔡旭飞
(上海工程技术大学,上海 201620)
0 引言
垂直起降(vertical takeoff and landing,VTOL)飞行器是以直升机方式垂直起降,并能以固定翼飞机方式前飞的无人飞行器。与传统无人直升机相比,垂直起降飞行器前飞速度快、航程远。与固定翼飞行器相比,垂直起降飞行器对跑道无依赖,能够定点悬停。垂直起降飞行器尤其适用于甲板起降和快速飞行的场合。垂直起降飞行器在未来海战中用途广泛。舰载垂直起降飞行器能够方便部署于大部分舰艇。与传统无人直升机相比,垂直起降飞行器速度快、航程远、油耗低。舰艇垂直起降飞行器可在母舰或岛屿周边执行敌情侦察、战区防御、火力支援、对海攻击、毁伤评估、物资补给、伤员救助、通讯中继等。本项目的研究源于原有垂直起降固定翼飞机其他垂直起降固定翼飞行器起飞不稳定以及成本高的弊端,设计一种高效涡扇垂直起飞的固定翼飞行器。
1 飞行器设计思路
由国内外垂直起降固定翼飞行器技术方案发展现状可以看出,更高的飞行速度、更长的续航时间、更强的任务载荷能力将是未来垂直起降固定翼飞行器技术的必然趋势。[1]本项目针对垂直起降固定翼飞行器在载荷过大时起飞不稳定以及成本较高的不足,提出一种高效经济垂直起飞的固定翼飞行器设计,减少为一套动力装置,同时通过姿态角度传感器,流速传感器和可调阀门,制作一款可以稳定起飞,成本低的固定翼垂直升降飞行器,提高垂直起降固定翼飞行器的实用性,极大促进未来垂直起降固定翼飞行器的应用前景。
2 飞行器整体设计
在飞行器外观方面,以美国F-35B战斗机为雏形,在其基础上进行修改。
飞行器整体布局采用涵道式设计,倾转涵道式垂直起降固定翼无人机的技术特点与倾转旋翼相类似,但由于涵道动力与机体融合度更高,可以设置在机身或机翼上从而提供直接的升力,在设计上更加灵活。[2]较原有F-35B垂直起降飞行器设计,减少为了一套动力装置,改为单涵道设计,并且在飞机机身下方设置了三个向下喷口,在保证平稳起飞的前提下,大大减少了制造所需要的成本。
左右下喷口、后下喷口以及尾喷口都带有可控阀门,同时左右喷口处装有流速传感器,飞行器起飞时,通过流速传感器模块采集左右通道气体流速大小。根据气体流速计算公式:流速=排除空气体积/(压缩空气时间*管道横截面积)=V/(T*S)可知,通过调节可控阀门改变管道横截面积,以此来控制左右管道流速大小,以此改变三个口推力大小,保持一定的力矩平衡,提供左右机翼大小相等的升力,实现飞机的平稳起飞。
同时飞行器还加装了挂架,在需要的情况下可以挂载需要的设备或者导弹,在满足了飞行器最大载重的情况下使飞行器的可利用程度大大提升。

图1 飞行器侧视图

图2 飞行器俯视图
3 飞行器特殊设计
飞行器改为单涵道设计,通过一套动力装置,以及四个喷口的配合,实现飞行器的起飞降落以及飞行任务,极大地减小了飞行器本身的重量,以此获得更大的推重比,同时配合可调阀门的设计,减少了多余的动力流失。
本款飞行器加入了特殊的可控阀门设计,在喷口最大截面处设计了可控阀门控制流量输出。当无人机起飞时,姿态传感器实时检测到姿态角产生角度变化时,负反馈电路会及时调整阀门面积,使无人机回到平衡状态。
根据牛顿第三定律:推力产生原因为喷口喷出气体对空气的反作用力,又因为流速公式V/(T*S),喷口s面积相同,因此推力大小可以等效为进入喷口气体流量大小,且升力~Q,Q越大,推力越大。根据流量公式Q=v·A:在等截面阀门设计下,无人机管道内可视为均匀流场,v处处相等,于是Q正比于A,A越大,Q越大。由此推得推力~A,A越大,推力越大。由此,通过调节阀门面积控制升力大小的情况验证完毕。
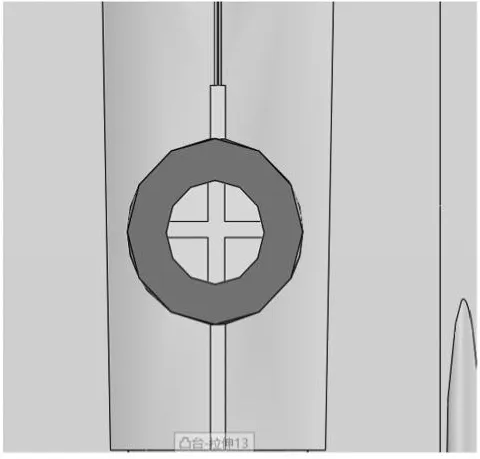
图3 可控阀门设计

图4 三个可控阀门开口分布
4 理论飞行模拟
起飞模拟过程:关闭尾部喷口阀门,打开左右以及后下喷口,并不打开发动机,飞行器获得升力实现起飞。在垂直起飞时候,姿态传感器以及检测姿态传感器,三轴角度偏差大于20度时候,通过电路检测阀门流速,进行负反馈电路设计,反馈给阀门控制,并通过改变阀门大小改变,实现飞机的平稳起飞。在上升到所需高度后,缓慢关闭左右以及后下喷口,打开尾部喷口,飞行器获得推力,实现水平飞行,同时继续不断采集姿态传感器和流速传感器,并通过下喷口配合保持升力和力矩平衡,根据力矩公式M=F×d:由于F始终垂直于力臂且不变,因此力矩大小与力的大小成正比。当传感器检测到产生时,b阀门减小横截面积A,以此减小推力F2。由于d不变,因此净力矩为M合=(F1-F2)·d产生了一个顺时针方向的力矩,逐渐减小,姿态回正。回正时再逐渐扩张b阀门,使其回到全开状态,回正后实现Aa=Ab,使得F1=F2,M合=0,无人机以小角度姿态继续上升。尾部喷口阀门大小改变可以获得不同的推力,实现加速和减速。完成飞行器任务后,关闭尾喷口,打开三个下喷口后,配合姿态传感器和流速传感器,实现平稳下降。
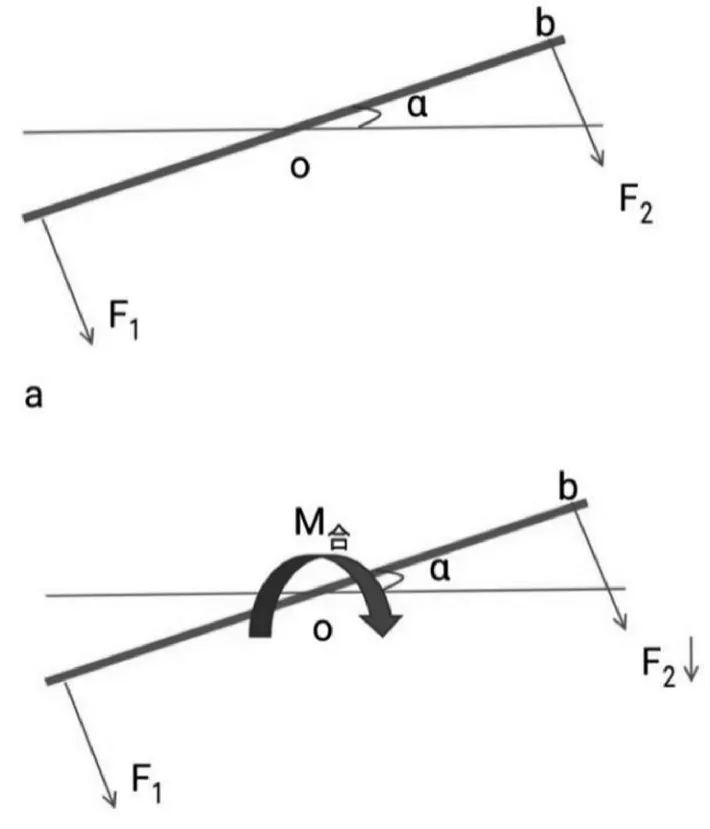
图5 力矩平衡

图6 电路控制
5 总结与展望
随着计算机技术和实验技术的快速发展,以及国内外对分布式电推进技术在飞行器总体/动力/气动/控制等方面潜力的深入挖掘,进一步加强对垂直起降固定翼无人机新构型、新原理的探索性研究,突破垂直起降完全依靠动力推力的限制很有必要。本款设计另辟蹊径,以更小的重量和成本获得了更大的推重比,实现了高效经济的愿景,同时也为将来的垂直起降飞行器提供了一种新型思路。
本款飞行器没有进行仿真模拟,在考虑可采纳的情况下可以进行模拟仿真验证其理论效果,并且可以制造仿真飞行器进行实际模拟以验证实际效果。
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
排灌机械工程学报(2022年6期)2022-06-23 02:09:24
航空维修与工程(2022年12期)2022-02-04 11:21:00
北京航空航天大学学报(2021年4期)2021-11-24 01:13:00
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
电子制作(2019年7期)2019-04-25 13:18:24
疯狂英语·新读写(2017年7期)2017-08-08 03:01:07
航空模型(2016年10期)2017-05-09 06:25:59
制造技术与机床(2017年12期)2017-02-02 07:05:09