动车组平稳和失稳检测装置的抗混叠滤波优化设计
2022-09-07 07:02吴文慧李子先谭富民刘欲燃
控制与信息技术 2022年4期
李 伦,吴文慧,李 娜,李子先,谭富民,刘欲燃
(中车株洲电力机车研究所有限公司, 湖南 株洲 412001)
0 引言
动车组失稳检测装置使用加速度传感器对转向架的横向加速度信息进行采集,识别对列车运行安全构成威胁的蛇行失稳运动状态[1],参与车辆整体控制,通过限速将蛇行失稳控制在一定范围内,以保障车辆行驶安全[2]。而动车组平稳检测装置则使用三轴加速度传感器对车厢的三维晃动进行实时监控,通过傅里叶分析后,将各频段分量通过特定算法加权后计算出车厢的平稳性指标,必要时也会参与车辆控制,以防止车厢晃动对旅客人身安全造成伤害[3]。两种检测装置的加速度传感器均位于车体外侧,电磁环境复杂,必须采取多种措施来确保系统能够采集到真正的加速度信号而不是干扰信号,其中最重要的是防止信号在采样处理过程中混叠。这是因为如果发生信号混叠,以目前的技术手段是无法将干扰信号从有效信号中分离出来的[4],从而对行车安全造成重大影响。
既往动车组平稳、失稳检测装置完全依靠低通滤波器硬件电路来进行抗混叠处理。为了在有限的频带内将干扰信号衰减至足够低,只能增大低通滤波器(low pass filter,LPF)的阶数,但这不仅会导致整套电路复杂度高、占用电路板面积大,而且电路还存在特性一致性差、参数无法灵活修改等问题[5]。若继续沿用传统电路,则无法满足动车组最新车型对电子装置提出的小型化、灵活配置等要求,因此需要对动车组平稳、失稳检测装置的抗混叠滤波功能加以改进。为此,本文提出一套数模混合抗混叠滤波的优化方案。
1 动车组平稳、失稳检测装置的抗混叠需求
动车组平稳和失稳加速度信号都属于低频信号,信号带宽分别在40 Hz左右和20 Hz左右。出于节省存储空间的考虑,系统规定的最终数据采集频率都较低,失稳数据采集速率为250 次/s,平稳数据采集速率为512 次/s,所以两者的奈奎斯特频率分别为125 Hz 和256 Hz,而所有频率大于奈奎斯特频率的信号都会产生混叠现象。
对现场加速度传感器输出的信号进行实测(图1),结果显示,存在大量125 Hz 以上频率的分量。特别是在700~800 Hz 区间,干扰信号出现峰值,如果不加以充分抑制,这些干扰信号将混叠进最终数据中,使所测量得到的加速度值偏高,甚至引起错误的报警,对动车组的正常行车造成很大的负面影响。
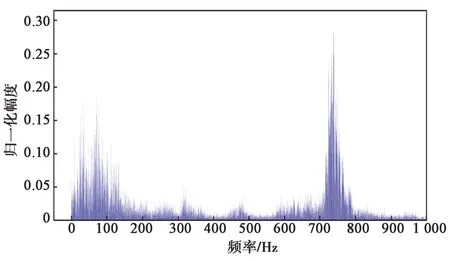
图1 现场信号频谱Fig.1 Field signal spectrum
2 既往动车组平稳、失稳检测装置抗混叠方案
抗混叠低通滤波器通过LPF滤除输入信号中频率大于奈奎斯特频率的信号分量,实现抗混叠这一目标,如图2所示。图中,fin为信号带宽。

图2 抗混叠低通滤波器Fig.2 Low pass anti‐aliasing filter
理想的LPF在通带(频率在0~fin范围)内对信号无衰减,在阻带(频率>fin)内将信号衰减至0。但实际上,LPF 电路在通带内总有少量衰减存在,在阻带内总是存在过渡带,在过渡区内信号的衰减也不是无穷大。通过增加LPF的阶数,可使滤波器的通带越来越平坦,阻带的衰减速度越来越快,但硬件电路的复杂度会迅速提升[6]。
既往动车组平稳、失稳检测装置使用高阶模拟LPF 进行抗混叠处理,如图3 所示,按照平稳、失稳系统信号的带宽需求以及最终数据率,设计了一种5 阶LPF 来满足在125 Hz/256 Hz 奈奎斯特频率处的衰减需求。但这种纯硬件的高阶LPF在应用过程中暴露出很多缺点:不仅电路复杂、占用电路板面积大;而且阶数越高,需要的运算放大器和无源器件的数量也越多,由此带来的各种器件偏差会引起滤波器幅频特性变化、增益偏差等,而这些偏差受随机分布和温度变化的影响,很难通过后期处理进行完美补偿[7]。

图3 平稳和失稳检测装置用模拟高阶LPF 特性Fig.3 Characteristics of analog high‐order LPF in stability and instability detection devices
在该装置的应用过程中,因为不同车型的转向架和车厢以及不同线路的特性不同,有效信号的频率范围和最终数据采样频率并不一致,此时必须通过改换器件来实现相关的滤波参数调整,灵活性很差。
3 动车组平稳失稳装置抗混叠优化
3.1 数模混合滤波
为了降低电路的复杂度,必须降低硬件LPF 的阶数;同时,为避免混叠现象,根据奈奎斯特定律,通过提升模数转换电路(ADC)的采样频率fs,达到大幅度提升混叠频率的目标,这种方法被称为过采样,如图4所示。将采样频率提升M倍,奈奎斯特频率就提升至0.5Mfs,这就大大增加了信号带宽与奈奎斯特频率的频差,从而允许使用更低阶数的LPF。[8]

图4 过采样时的抗混叠Fig.4 Anti‐aliasing under oversampling
虽然通过过采样避免了混叠,但最终产生的数据量远超实际需要,因此还需要引入抽取环节,通过1/M抽取(每M个数据,抽取一个使用,其余的抛弃)方式,将最终数据采样频率降低到我们实际需要的频率值。
抽取过程降低了数据采样频率,本质上也可以等效为一个采样系统,同时也遵循奈奎斯特定律,因此抽取前必须引入数字LPF 以降低采样后数据的带宽,一般使用高阶有限长单位冲激响应(finite impulse response,FIR)数字LPF[9],其具备陡峭的滚降特性。数字滤波器的频域特性在采样频率范围内以1/2采样频率中心对称,并无限延伸[10],如图5所示。

图5 一种FIR 数字LPF 频域特性Fig.5 Frequency domain characteristic of a digital FIR LPF
结合过采样,数字低通滤波和抽取后的整个采样过程抗混叠特性如图6所示,混叠频率提升至(Mfs‐fin)频点处,进一步降低了对外部模拟LPF的需求。根据实际需求,有时甚至采用一阶RC 低通滤波就能获得所需的滤波特性[11‐12]。

图6 “过采样+数字滤波”抗混叠频域特性Fig.6 Frequency domain characteristic of anti‐aliasing of oversampling and digital filter
3.2 失稳检测装置信号采集数模混合滤波
失稳检测装置信号采集总体架构如图7 所示。输入信号首先经过外置的一阶RC电路(-3 dB带宽设计远大于信号带宽,以充分保留有效信号),再由ADC进行128 倍过采样以及80 Hz 带宽的数字低通滤波;然后,对低通滤波后的数据进行抽取,产生250 次/s 中间数据并进行2~15 Hz 的带通滤波处理,产生最终的250次/s数据。

图7 改进后失稳检测装置信号采集流程与抽取前频域响应Fig.7 Signal acquisition process and frequency domain response before extracting in the instability detecion device with the improved anti‐aliasing filter scheme
设计中,将低通滤波和带通滤波分开处理,这样可以降低FPGA 的运算负荷,同时方便数字滤波器的特性调整,以满足后续参数灵活调整的需要。相关数字滤波器的特性见图8~图10。

图8 失稳信号采集数字LPF 频域响应Fig.8 Frequency domain response of digital LPF for instability acquisition
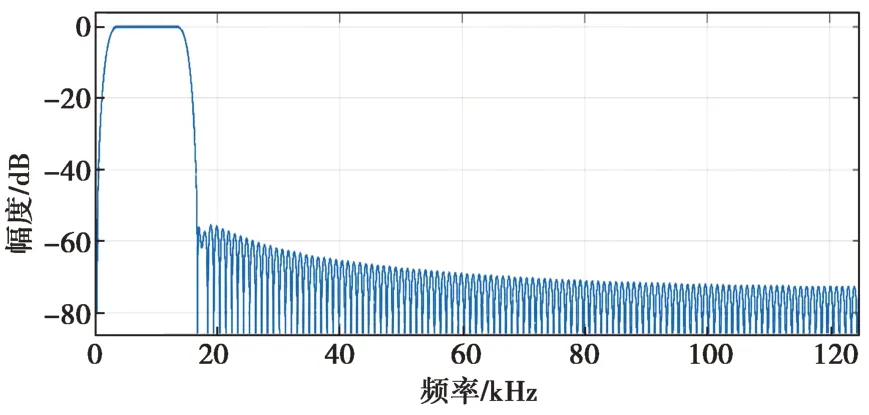
图10 失稳信号采集数字带通滤波器频域响应Fig.10 Frequency domain response of digital band pass filter for instability acquisition
采用32 kHz 采样频率与80 Hz 带宽的数字LPF后,混叠点频率上移至31.92 kHz。在该频率处经外部的一阶RC 滤波可以获得大于60 dB 的衰减,与采用5阶硬件LPF 的滤波效果一致,且采样过程不存在混叠现象。数字滤波器在抽取混叠点125 Hz处的衰减大于60 dB,抽取过程不存在混叠现象。可见,整个失稳数据处理过程中完全消除了混叠现象。
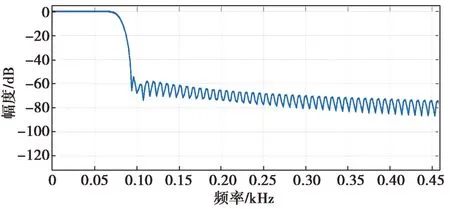
图9 失稳信号采集数字LPF 频域响应(放大)Fig.9 Frequency domain response of digital LPF for instability acquisition(amplified)
3.3 平稳检测装置信号采集数模混合滤波
平稳检测装置信号采集数模混合滤波总体架构见图11。输入信号经过外置的一阶RC滤波后由ADC进行32 kHz过采样;对过采样后的信号进行150 Hz带宽的数字低通滤波并对低通滤波后的数据进行抽取,产生512次/s中间数据;对抽取后的数据进行0.5~40 Hz的带通滤波,产生最终的512次/s数据。相关数字滤波器的特性见图12~图14。

图11 优化后平稳检测装置信号采集流程与抽取前频域响应Fig.11 Signal acquisition process and frequency domain response before extracting in the instability device with the improved anti‐aliasing filter scheme
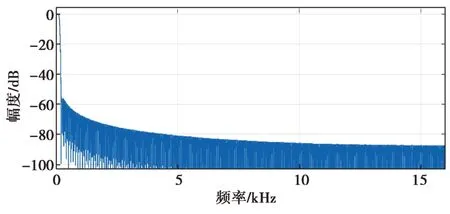
图12 平稳信号采集数字LPF 频域响应Fig.12 Frequency domain response of LPF for stability acquisition

图14 平稳信号采集数字LPF 频域响应(放大)Fig.14 Frequency domain response of LPF for stability acquisition(amplified)
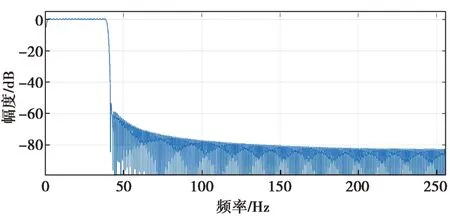
图13 平稳信号采集数字带通滤波器频域响应Fig.13 Frequency domain response of digital band pass filter for stability acquisition
采用32 kHz 采样频率以及150 Hz 带宽的数字LPF 后,混叠点频率上移至31.85 kHz。在该频率处经外部的一阶RC滤波可以获得大于60 dB的衰减,与采用5 阶硬件LPF 的效果一致,且采样过程不存在混叠现象。数字滤波器在抽取混叠点256 Hz处的衰减约为60 dB,抽取过程不存在混叠现象。可见,整个平稳数据处理过程中完全消除了混叠现象。
4 实车测试情况
针对动车组平稳、失稳检测装置对车辆加速度信息的采集过程,本文结合过采样与数字滤波技术,使用一阶LPF代替原始的高阶LPF,大大简化了电路结构,且抗混叠的一致性和应用中的灵活性都得到了极大提升:平稳和失稳信息的采集不仅可以共用同一套硬件电路,而且通过后续的算法调整,还可以灵活适配不同车型对于信号带宽的需求。
本文所提数模混合滤波方案已经在时速250 km标准动车组稳定性采集装置上应用,其路试结果如图15 所示。图中,黑色曲线为加速度原始信号,其内部包含大量的高频干扰信号,但幅值均未达到报警条件。
当取消过采样与数字LPF而只包含外部模拟一阶LPF时,失稳系统采集到的加速度信息如图15中橙色曲线所示。可以看到,曲线中间部分存在明显的振荡现象,幅值偏高,已经达到报警条件。
增加过采样与数字LPF消除混叠后的加速度信息如图15 中黄色曲线所示。可以看到,相关振荡得以消除,幅值恢复正常。将数据与同车不同车厢安装的其他厂家的同款设备所采集的数据进行对比,结果基本一致,这表明采用该数模混合抗混叠方案可以避免信号混叠现象的发生。

图15 数模混合抗混叠方案效果Fig.15 Effect of anti‐aliasing filter by analog‐digital mixture technology
5 结语
本文设计了一种针对动车组平稳、失稳系统的改进型数模混合抗信号混叠方案,其大幅度缩减了前端硬件滤波器的阶数,降低了电路的复杂度。该方案已经应用于时速250 km 标准动车组。试验结果表明,该方案具有与传统高阶硬件模拟LPF方案近似的抗混叠性能,同时在滤波特性的一致性和参数更改的灵活性上有较大提升。后续可以通过优化数字滤波器算法,进一步改善滤波效果。
猜你喜欢
电子设计工程(2022年20期)2022-10-28
成都信息工程大学学报(2021年1期)2021-07-22
汽车实用技术(2019年20期)2019-11-06
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年1期)2017-05-17
科技创新导报(2016年26期)2017-03-13
振动工程学报(2016年2期)2016-07-20
火控雷达技术(2016年1期)2016-02-06
燕山大学学报(2015年4期)2015-12-25