地下电缆沟智能巡检机器人导航避障技术研究
2022-09-07 07:00肖慧慧樊绍胜胡晓东
控制与信息技术 2022年4期
肖慧慧,樊绍胜,何 瑛,胡晓东
(1. 复杂环境特种机器人控制技术与装备湖南省工程研究中心,湖南 湘潭 411104;2. 湖南理工职业技术学院,湖南 湘潭 411104;3. 长沙理工大学 电气与信息工程学院,湖南 长沙 410014;4. 电力机器人湖南省重点实验室,湖南 长沙 410014;5. 中车株洲电力机车研究所有限公司,湖南 株洲 412001)
0 引言
随着我国经济的增长以及人民生活水平的不断改善,工业及城市居民用电量持续增加,电力系统供配电电网处于不断增容扩建状态。电缆沟是电力系统必不可少的基础设施。地下电缆沟一般比较窄小,对其中电缆的检测目前还多以人工为主。检修人员携带红外测温仪、手电筒和相机等工具在沟道中行走巡检很不方便,且沟内的空气质量差,可能存在有毒、有害气体[1],这不仅给电力运维人员定期巡检带来了很大困难,而且巡检过程中很难及时发现电缆火灾或运行过程中的安全隐患。对此,一种智能巡检机器人被研制出来并在不断被改进,用于代替电力巡检人员高效、安全地完成地下电缆巡检工作[2]。近年来,电力系统巡检机器人技术经过快速发展,在市场上已有功能较为完善的产品,主要集中在地面设备巡检的应用;而针对地下电缆沟巡检的机器人研究较少,尤其是在复杂的地下电缆沟环境下,巡检机器人的导航精度、故障检测的可靠性以及环境适应性仍需提高。
地下电缆沟空间狭窄,环境特殊复杂,操作人员手动控制巡检机器人在电缆沟中行走时较易碰撞到两侧的墙壁或者是电缆的横担,导致机器人损坏。导航定位是地下电缆巡检机器人能够实现自主运行的关键技术之一,其主要是通过探测机器人的四周环境进行定位,识别检测出行驶路径,再沿着路径自主行驶,以完成相应的巡检任务。本文以双驱动履带式电缆沟智能巡检机器人为载体,采用基于改进的RBPF(Rao‐Blackwellized particle filter)‐SLAM(simultaneous localization and mapping)算法对电缆沟智能机器人进行定位并同时构建地图,在此基础上设计自主导航避障控制策略,实现机器人的自主导航定位,使机器人在巡检时不仅能避免碰撞,还能进一步提高巡检效率[3]。
1 电缆沟智能巡检机器人系统简介
地下电缆沟内空间比较狭窄,可能存在砖头、施工时遗留的线缆、动物尸体等杂物,电缆沟巡检机器人在进行巡检时需要具备以下能力:在电缆沟内直线行走且能灵活转向,具备足够的爬坡及跨越障碍的能力。为此,本文的智能巡检机器人车体采取双电机履带驱动车体结构,其由机械底盘、电源模块、控制电路单元、驱动模块、电机、通信模块、图像采集模块以及各类传感器模块等组成,实物如图1所示。车体携带旋转云台和红外、高清双视频摄像机,用于监测电缆沟内的温度分布、电缆及电缆接头部分的运行状态;搭载陀螺仪、激光雷达等,用于感知运动姿态,实现对车体当前行进方向等信息的获取。

图1 双驱动履带式机器人实物Fig. 1 Dual‐drive‐crawler robot material object
智能巡检机器人在地下电缆沟执行巡检任务时,依托本体所搭载的图像采集模块、传感器模块获取数据[4],并通过相应的导航定位算法、运动控制算法、多传感器融合状态评估算法以及电缆沟三维建模算法等来对数据进行分析、计算[5],从而获得对机器人本体控制以及对电缆沟内环境的感知,完成自主导航避障、电缆运行状态检测、电缆沟内有害气体状态及温湿度状态检测等任务。
巡检机器人车体基本参数如下:长宽高分别为500 mm、300 mm、120 mm,底盘自重8.45 kg,最大负重30 kg。根据车体运动方程求解得知机器人总驱动能力要求为58.5 W,因此选用功率不低于30 W 的驱动电机。双电机通过差速控制对车体的转向和掉头等运动姿态进行控制。
2 电缆沟智能巡检机器人导航定位
本文从适用于地下电缆沟内部环境的角度来设计智能巡检机器人的导航定位方案。将机器人看成是一个整体来建立运动模型。为实现自主导航避障,提高导航定位精度,对RBPF‐SLAM算法进行了改进,使机器人在移动时不仅能描绘出完整的地图,而且在构建地图的同时又能在地图中找到机器人本身的位置。
2.1 机器人运动模型
在建立电缆沟机器人运动模型时,为简化电缆沟机器人结构,将机器人看作一个整体,根据RPY(Roll翻滚角,Pitch俯仰角,Yaw偏航角)变换方法建立地下电缆沟智能巡检机器人大地坐标系和车体坐标系之间的联系,如图2所示。OXYZ为大地坐标系,主要用来描述电缆沟智能巡检机器人整体所在位置信息,机器人的运动起点为大地坐标系的原点;OrXrYrZr为车体坐标系,其随着机器人的移动而移动,机器人当前时刻所处位置的几何中心点为车体坐标系的原点。车体坐标系 与大地坐标的旋转矩阵关系如式(1)所示[6]。
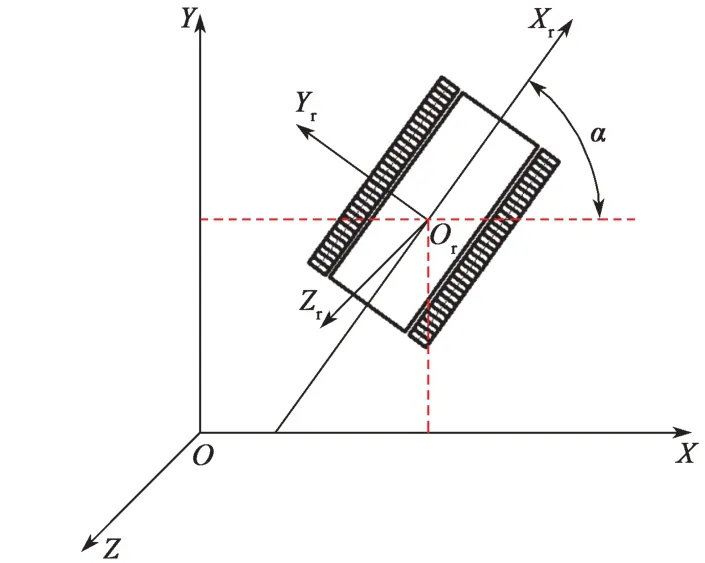
图2 机器人坐标系Fig. 2 Robot coordinate system

式中:α——偏航角;β——俯仰角;γ——翻滚角。
机器人在地下电缆沟巡检运动时近似为理想状态的水平面运动,机器人的俯仰角和翻滚角可以忽略不计,只需要考虑前进时的偏航角,则机器人的位姿信息可简化为用(x,y,α)来表示[7]。
在图2 的二维平面XOY中,车体坐标系相对大地坐标系绕Z轴旋转了α角度,规定逆时针方向为正,简化后的旋转矩阵如下:

则大地坐标系和车体坐标系的转换关系为

机器人在运动过程中既有平移运动,也存在旋转运动。为建立相对精确的机器人运动学模型,假设t到(t+1)时间段内机器人在进行如图3 所示的弧线移动[8],在t时刻,机器人的位姿为。在大地坐标系下,移动后机器人的位姿增量为
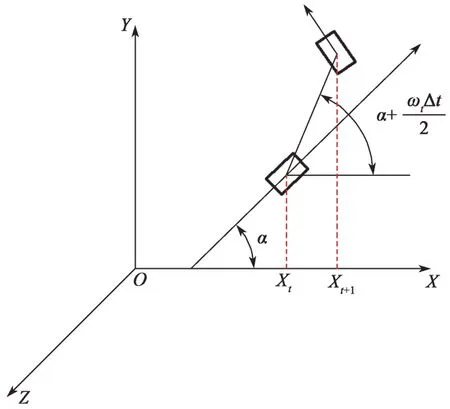
图3 机器人弧线运动图Fig. 3 Arc motion of robot
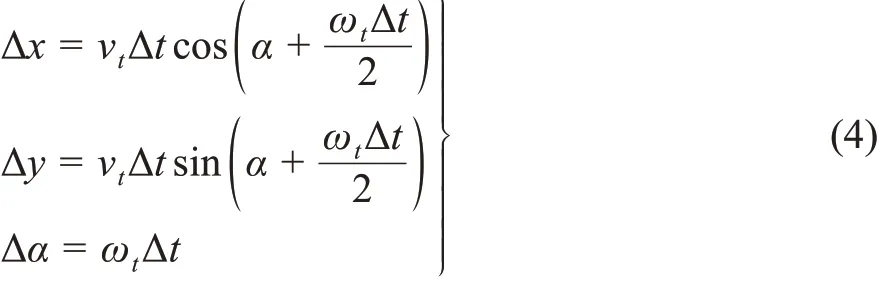
式中:vt——机器人的平移线速度;ωt——机器人的旋转角速度。
根据式(4),可以得到大地坐标系下的机器人运动数学模型[9]:
2.2 基于改进RBPF-SLAM算法的定位与地图构建
2.2.1 同时进行定位与地图构建
在陌生的地下电缆沟环境中,智能巡检机器人通过在车载传感设备对周围环境进行观测,采集路标的观测值数据并构建局部环境地图[10]。随着智能巡检机器人位姿的不断变化,传感器采集的观测信息也不断地更新并对机器人的位姿进行校正,以实现机器人在环境地图中的自定位;同时,根据不同时刻构建的局部环境地图对全局地图进行更新[11]。图4示出巡检机器人的同时定位与地图构建图。图中,xt为t时刻地下电缆沟智能巡检机器人的位姿向量xt=[xt yt βt]T,x0为机器人初始位姿,则x0:t=[x0x1…xt];ut为地下电缆沟智能巡检机器人从(t‐1)时刻到t时刻之间的运动控制量,则u1:t=(u1,⋅⋅⋅,ut);mi为在全局地图中第i个路标位姿向量,该路标假定为固定不变的路标,位姿信息不随时间变化,环境地图可由mi=(m0,m1,⋅⋅⋅,mn)表示;zit为机器人在t时刻扫描环境信息时获取的第i个路标的位姿观测值,全部路标的位姿观测值可表示为z0:t=(z0,z1,⋅⋅⋅,zt)。
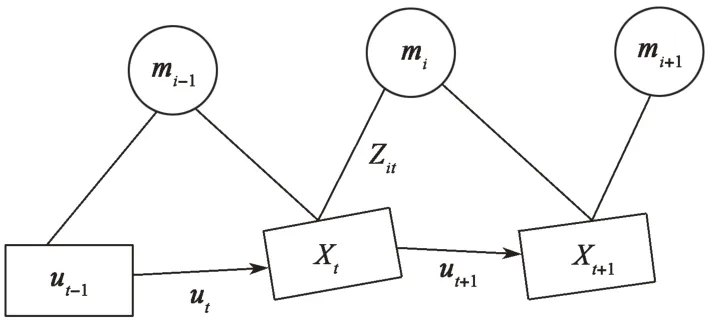
图4 同时定位与地图构建图Fig. 4 Simultaneous positioning and map construction
2.2.2 改进RBPF‐SLAM算法
常规RBPF‐SLAM 算法通过获取机器人所搭载的外部传感器信息数据和里程计数据,预估机器人的运动轨迹与环境地图联合的后验概率密度;然后基于Rao‐Blackwellised 粒子滤波器,估计机器人位置姿态,构建相应的栅格地图。算法步骤如下:采样→权重计算→重采样→地图更新。在计算过程中,一般选取里程计运动模型作为提议分布。这样虽然计算简单,但运算速度比较慢,在迭代过程中,很多权重小的粒子会被舍弃,权值严重退化。因此,常规RBPF‐SLAM 算法在进行定位与地图构建时精度较低[12]。
在采样的过程中,需要根据提议分布对前一时刻的粒子进行采样,且提议分布的精度直接影响采样的效果。本文通过将环境感知传感器(即激光雷达)的最新测量数据融入提议分布,同时在重采样过程中引入自适应重要性采样算法,对RBPF‐SLAM 算法进行改进。融入了激光雷达数据的优化提议分布如下:
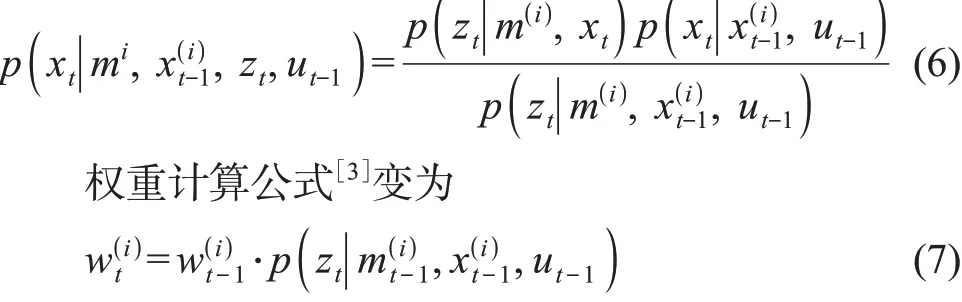
在自适应重要性重采样时,对粒子权重进行归一化处理,即重采样时需要获取权值差不多的粒子。通过式(8)即可获得归一化粒子的重要性权值[2]。

采用改进后的RBPF‐SLAM 算法,电缆沟智能巡检机器人的定位与构图精度都得到了提高。图5 示出由RBPF‐SLAM 算法构建的栅格地图,其中图5(a)为真实工作环境,图5(b)为通过改进RBPF‐SLAM 算法构建的栅格地图。可以看出,采用本算法构建的地图边缘清晰,没有重叠现象,较好地反映了真实的运行环境。
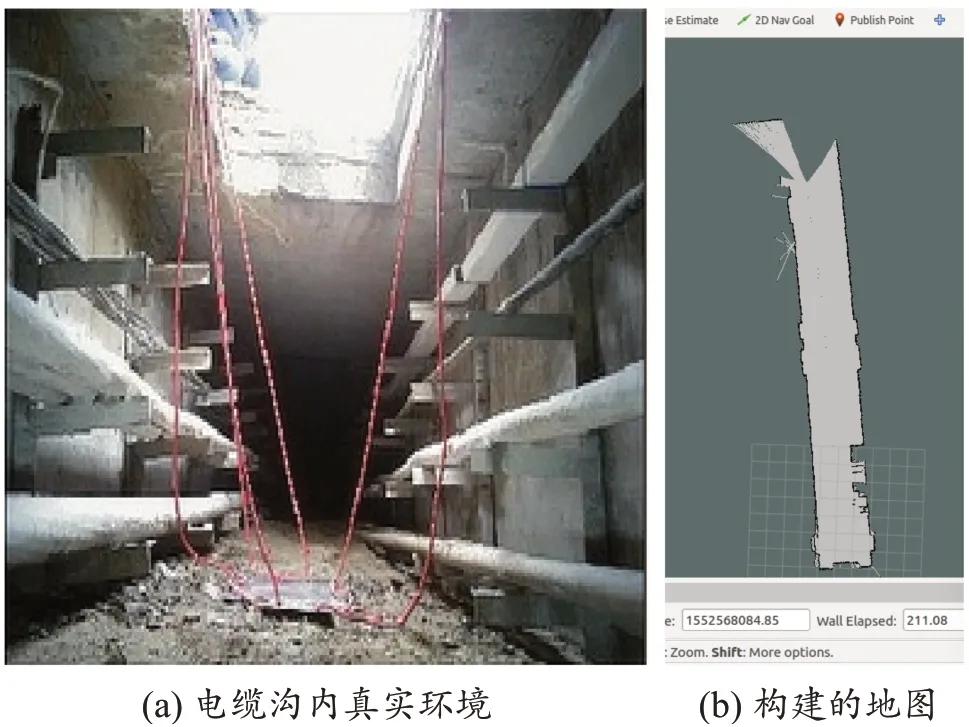
图5 RBPF‐SLAM 算法构建的栅格地图Fig. 5 Grid map constructed by RBPF‐SLAM algorithm
3 机器人控制系统
在电缆沟中,智能巡检机器人为了完成相关巡检任务,不仅需要具备自主导航定位的功能,而且要求在行进过程中,能够对导航线路中出现的各种障碍物进行规避,即具备主动避障的功能[13]。电缆沟智能巡检机器人控制系统结构如图6所示。
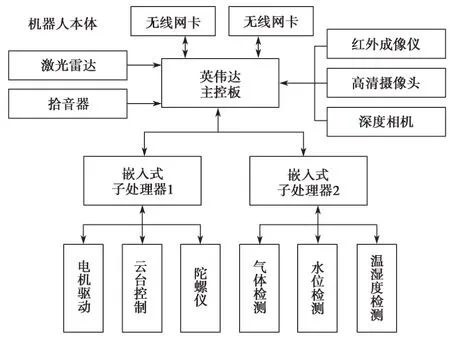
图6 机器人控制系统结构Fig.6 Structure of robot control system
系统采用多CPU协同工作的架构,以提高系统的数据处理能力。机器人的核心处理模块采用的是英伟达的核心主控板,其能够提供强大的图像处理能力。搭载有专为机器人控制而设计的ROS操作系统,以提供完成自主导航算法的系统平台。巡检机器人安装有激光雷达,其直接接入到英伟达主控板上,为机器人提供定位信息。红外成像仪、高清摄像头以及深度相机等视觉传感器也被直接接入英伟达主控板,由其对所采集的图像进行处理,实现对红外、高清图像的信息融合以及对深度相机所反馈的深度信息的重组,以构建电缆沟隧道的三维立体模型,用于准确判别特定电缆走向,为机器人在电缆沟内的运动控制提供基础[14]。
系统嵌入式子处理器模块用于实现对机器人的运动控制,其搭建了陀螺仪,以获得机器人的位姿信息;通过对机器人驱动电机的控制,实现了对机器人前进、后退、转弯以及掉头等运动姿态的控制。另外,通过控制搭载红外、高清摄像头的云台,实现了机器人对电缆沟隧道多方位、立体的视觉观测[15]。
4 实验结果分析
为验证机器人性能是否满足项目设计要求,将电缆沟智能巡检机器人放入某电力公司电缆沟现场进行导航避障、越障等方面性能测试,并人为设置了砖块、PVC管、撬棍等障碍物。通过1.5 h的反复测试,得到机器人的导航定位误差小于20 mm、最大越障高度达90 mm的实验结果,表明其满足电缆沟巡检要求。
4.1 巡检机器人导航避障能力测试
电缆沟内部有一些较高的障碍物,机器人无法直接翻越通过。这种情况下,就需要巡检机器人具备足够的避障能力,能够通过路径规划,自主绕开障碍物通行。
图7示出巡检机器人导航避障能力测试实景。实验过程中,在电缆沟现场布置了竖立的砖块,以此来模拟较高的障碍物,通过操作终端给机器人下发巡检的线路点,由机器人自主进行导航行进。机器人在行进过程中,能够有效地发现障碍物并对路径进行及时的优化调整。电缆沟内部空间狭小,机器人避障路线没有过多的空间。在实验中,机器人仍然能对路线进行非常精准的规划,在绕开障碍物时,与障碍物之间保持了非常小的距离,从而以最小的空间代价完成了避障作业。结果表明,电缆沟智能巡检机器人的自主导航避障算法在保证避障成功的同时,因为自身体积小、不占周边空间、充分压缩了对周边空间的占用率,保障了在狭小电缆沟空间内的通过性。

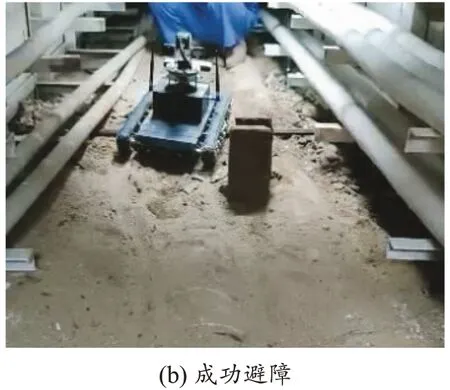
图7 机器人导航避障实验Fig.7 Robot navigation obstacle avoidance test
4.2 巡检机器人越障能力测试
电缆沟内部地面环境复杂,通常存在大量的泥沙、砖块、线缆甚至动物尸体等障碍物。巡检机器人必须具备足够的通过能力,才能在如此复杂的地面环境下执行巡检任务。图8示出巡检机器人越障实验实景。
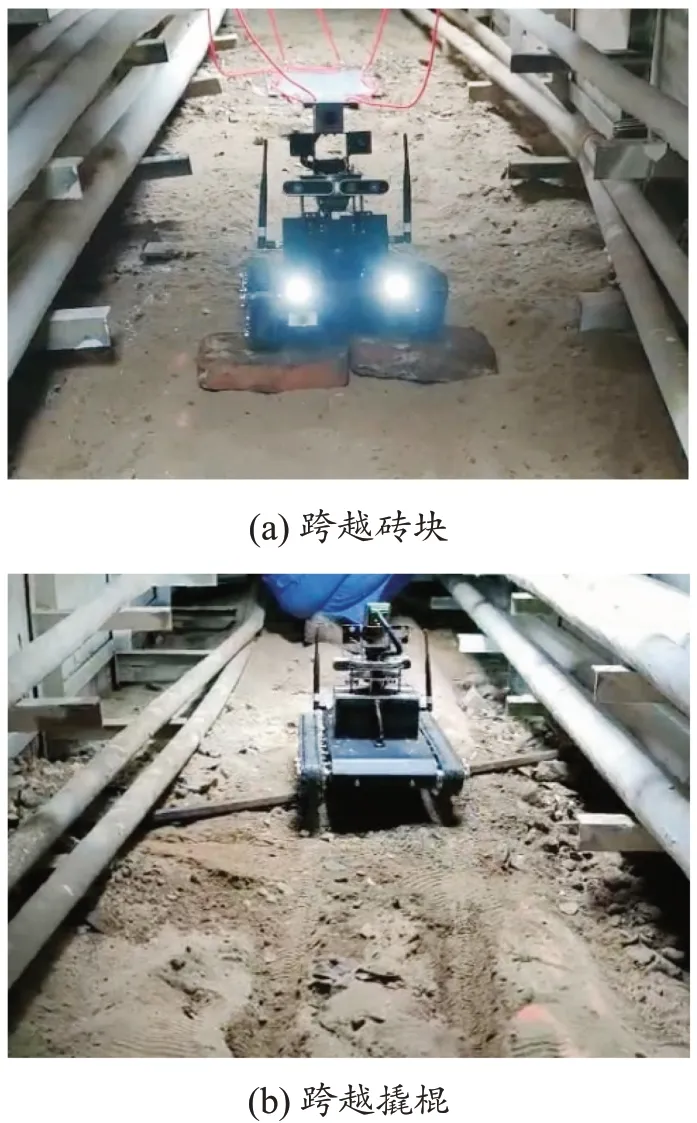
图8 机器人越障实验Fig.8 Robot obstacle climbing test
现场在电缆沟内模拟了各种类型的障碍,以检验巡检机器人的通过能力。实验障碍对象包括有电缆沟地面埋设的PVC 管、横向摆放的2 块砖块以及斜向放置的直径约30 mm 的撬棍等。实验过程中,巡检机器人能够轻易地跨过PVC 管;面对砖块时,通过调快行进速度,巡检机器人能轻易地跨过砖块,实现越障;而在经过撬棍时,通过调整机器人的行进角度,最终也成功地跨越了撬棍障碍,实现了越障。测试结果表明,巡检机器人具备足够的越障能力,能够应对电缆沟内部大部分障碍情况;即使面对金属撬棍这类特殊障碍物,也能够通过调整行进角度的方法实现越障,说明该巡检机器人有能力完全应对电缆沟内的地形环境。
5 结语
本文通过建立电缆沟智能巡检机器人运动模型,采用改进的RBPF‐SLAM算法对电缆沟智能巡检机器人同时进行定位与地图构建,设计了机器人控制系统,实现了电缆沟智能巡检机器人在阴暗狭窄、内部复杂环境下的自主导航定位。实验结果表明,地下电缆沟智能巡检机器人利用改进的RBPF‐SLAM算法构建环境地图是可行的;对于电缆沟内的地形环境,机器人通过多CPU 协同进行控制,具备足够的越障、避障通行能力,满足地下电缆沟内巡检任务需求。
受时间方面的限制,在狭小的电缆沟内,当输电线缆较多或环境较为极端时,该机器人的通过性还有待进一步验证。后续将进一步优化机器人结构,提高机器人在不同电缆沟情况下运行的适应性,推动其向实用化、产品化的阶段迈进,为电力系统的稳定可靠运行提供有力支撑。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
现代信息科技(2020年22期)2020-06-24
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国高新技术企业(2017年1期)2017-03-24
科学中国人(2016年27期)2016-10-25