基于自适应引导滤波的红外图像细节增强
2022-09-07 15:18:44杨锦程郝志成王佳荣
液晶与显示 2022年9期
路 陆,姜 鑫,杨锦程,朱 明,郝志成,王佳荣
(1.中国科学院 长春光学机密机械与物理研究所,吉林 长春 130033;2.重庆嘉陵华光光电科技有限公司,重庆 400000)
1 引 言
红外成像系统具有良好的隐蔽性、抗干扰性以及可昼夜工作等特性,被广泛应用于军事和民用领域[1]。然而,受热辐射、热交换等因素影响,红外图像常表现出图像对比度低、边缘细节不突出、视觉效果模糊等不足[1],这将严重影响后续目标探测识别等任务的执行。此外,目前红外探测器常使用12~14 bit模数转换模块[2],输出图像动态范围远高于传统显示器的256个灰度级,不便于直接显示观察。因此,利用图像处理方法将原始红外图像动态范围压缩到显示器显示范围、增强图像细节,已成为当前红外应用中必不可少的图像处理操作之一。
2005年,美国FLIR公司提出了一种数字细节增强技术,同时完成了红外图像的高动态范围压缩与细节增强[3]。2009年,Branchitta等[4]提出了一种基于双边滤波[5]和动态范围划分的细节增强算法(Bilateral Filter and Dynamic Range Partitioning,BF&DRP),该算法基于分层处理架构,将输入图像分解成基础层和细节层,压缩基础层动态范围,增强细节层图像细节,然后将处理结果融合在一起。在此基础上,Zuo等[2]将双边滤波权重系数作为细节层自适应增益因子,有效抑制梯度反转伪像。Liu等[6]使用引导滤波[7]代替双边滤波,有效避免梯度反转伪像。Zhou等[8]在Liu等[6]的方法基础上,使用引导滤波线性系数作为细节层增益掩膜,进一步抑制平坦区域噪声。然而,Liu等[6]和Zhou等[8]算法中都使用固定值作为引导滤波的正则化系数,同一个正则化参数很难适应所有应用场景。为此,本文提出一种基于自适应引导滤波的红外图像细节增强算法,自适应选择引导滤波正则化系数,进一步提高算法的场景适应性。
2 基础理论
2.1 引导滤波
引导滤波[7](Guided Image Filtering,GIF)是一种基于局部线性模型的滤波器,其假设在局部窗口wk内引导图像I与滤波输出图像q满足线性关系:

其中,qi和Ii分别表示输出图像和参考图像的第i个像素灰度值,(ak,bk)是在局部窗口wk内为常量的线性系数。最小化代价函数为

可获得

其中,μk和σ2k分别表示参考图像I在局部窗口wk内 的 均值 和 方差,pi和pˉk分 别表 示 输 入 图 像p的第i个像素灰度值和局部窗口wk内的平均灰度值,|w|表示局部窗口wk内的像素数,ε表示正则化系数。
输出像素qi被多个窗口wk覆盖,可以获得多个可能值,平均所有可能值是最简单有效的估计方法:

2.2 平台直方图均衡化
平 台 直 方 图 均 衡 化[9](Plateau Histogram Equalization,PHE)是一种直方图均衡化改进算法,它引入平台阈值,解决传统直方图均衡化过增强问题,在红外图像增强领域中有广泛应用。
PHE计算过程如下:首先,削掉大于平台阈值T的直方图:

其中,H(i)为原始直方图,HT(i)为平台直方图。然后,计算归一化累计分布函数:

其中,R表示输入图像动态范围。
最后,PHE的输出图像可以表示为

其中,D表示输出图像动态范围,Iin(i)表示输入图像Iin的第i个像素灰度值。
2.3 Otsu法
Otsu法[10]是一种基于最大类间方差的自动阈值选择方法。设TOtsu为前景与背景的分割阈值,前景像素数占比p0,平均灰度为μ0。背景像素数占比p1,平均灰度为μ1。前景和背景的类间方差为

3 本文算法
本文算法流程如图1所示,具体步骤如下:

图1 本文所提出的算法流程图Fig.1 Flowchart of the proposed algorithm
(1)利用自适应GIF将输入图像Iin分离成基础层IB和细节层ID=Iin-IB;
(2)利用PHE压缩基础层动态范围获得IBP;
(3)利用掩膜图像IM加权和γ变换处理细节层,获得IDP;
(4)将IBP和IDP线性加权获得加权图像IW=(1-α)IBP+αIDP,其中α为线性加权系数;
(5)将IW线性拉伸到[0,255]范围,获得输出图像Iout。
3.1 自适应引导滤波
当输入图像p和参考图像I一致时,GIF变成一种边缘保护平滑滤波,式(3)可以简化为:

可以看出,在强边缘区域,局部图像方差σ2k远大于ε,ak→1,输出图像接近输入图像,具有边缘保持功能;在平坦区域,局部图像方差σ2k远小于ε,ak→0,输出图像接近局部平均,具有局部平滑功能。
正则化系数ε是影响细节增强效果的重要参数。ε过小,细节层包含大量噪声,如图2(b)所示,输出图像噪声明显;ε过大,细节层包含细节过少,输出图像细节增强不充分。文献[6,8]将ε设为固定值,缺乏自适应性,不能适应所有场景。文献[11]提出一种基于全局方差的正则化参数选择方法,对于高动态范围图像,全局方差过大,导致ε选择过大,细节层细节过少,如图2(c)所示。本文提出一种基于Otsu法的正则化系数自适应选择方法,可以获得更合适的ε,使得细节层保留更有用的边缘细节,如图2(d)所示。
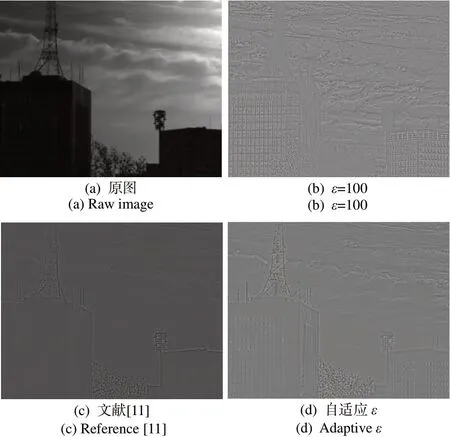
图2 不同ε细节层的对比Fig.2 Comparison of detail layers with different ε
正则化系数ε作用于整幅图像,就要权衡所有的局部图像方差本质上就是选择一个ε将所有分割成两部分,类似于图像二值化,因此本 文 使 用 最 经 典 的Otsu法[10]选 择ε。然 而,如图3(a)所示并不满足高斯分布,不适合用Otsu法计算阈值。相比之下在对数域更接近高斯分布,如图3(b)所示,更适合用Otsu法计算分割阈值TOtsu。阈值TOtsu将分成高低两部分,为了更好抑制低将TOtsu对应的扩大100倍作为最终正则化系数:


图3 局部图像方差直方图统计Fig.3 Histogram statistics of local image variance
3.2 细节层处理
为了抑制细节层噪声,选择自适应GIF的线性系数aˉi作为增益掩膜IM,对细节层ID加权,获得掩膜加权细节层IDM:

其中,“∘”表示点乘运算。
为了进一步增强图像细节,使用γ变换进一步增强掩膜加权细节层IDM:

其中,sign(·)表示符号函数,max(·)表示最大值函数,γ=1.2可以增强强边缘,抑制弱边缘。经式(12)和式(13)处理后,细节层的处理效果如图4所示,可以看出,在显著增强建筑边缘等图像细节的同时,也有效地抑制了天空等平坦区域的噪声放大。

图4 细节层的处理效果Fig.4 Processing effect of the detail layer
4 实验结果与分析
为了验证本文算法,选择3种场景进行对比实验,如图5所示。场景1是具有强烈明暗变化的典型高动态范围场景,场景2是纹理复杂的室外场景,场景3是典型的海天场景。实验使用的红外图像分辨率均为640×512,像素位宽14 bit。

图5 用于测试的3个场景Fig.5 Three scenes for testing
为了验证本文算法性能,选择7种传统和先进算法做对比,包括:自适应增益控制(Adaptive Gain Control,AGC)[12]、BF&DRP[4]、双边滤波和数字细节增强(Bilateral Filter and Digital Detail Enhancement,BF&DDE)[2]、引导滤波和数字细节增强(Guided Image Filter and Digital Detail Enhancement,GIF&DDE)[6]、改 进自适 应细节增 强(Improved Adaptive Detail Enhancement,IADE)[8]、时间数字细节增强2(Temporal Digital Detail Enhancement 2,TDDE2)[13]以 及 改 进 红 外 图 像 自适应增强(Improved Infrared Image Adaptive Enhancement,I3AE)算法[11]。本文算法关键参数选择如下:平台阈值T设为像素数0.01%,线性加权系数α=0.3。其他算法参数采用默认参数。所有实验算法均在PC平台(操作系统Windows10、Intel-i7处理器、48 GB内存)上用Matlab R2020b实现。
4.1 主观评价
图6~8展示了不同算法在3个场景中的对比实验结果。如图6所示,场景1是典型高动态范围场景,AGC、TDDE2和I3AE对阴影区域建筑细节增强不明显。BF&DRP和IADE都在一定程度上过度增强图像,而且BF&DRP在强边缘处会出现“梯度反转”伪像。BF&DDE和GIF&DDE在阴影区域具有显著的增强效果,但其在天空区域却出现严重失真。相比之下,本文算法不仅在天空区域获得合理的增强,在阴影区域也获得很好的细节增强,整幅图像视觉效果更自然。

图6 场景1的对比实验结果Fig.6 Comparison experimental results of sence 1
如图7所示,场景2是纹理复杂的室外场景,包含建筑、树木、阴影等诸多细节。BF&DRP过度增强了图像对比度,IADE过度增强了图像细节,两者都损失了图像自然感。BF&DDE和GIF&DDE处理效果严重失真。TDDE2损失了阴影区域图像细节。AGC、I3AE和本文算法都获得了良好的视觉效果,相比之下,本文算法处理效果更清晰,还有效保留了窗口铁丝网等纹理细节,如图7(h)中红圈所示。
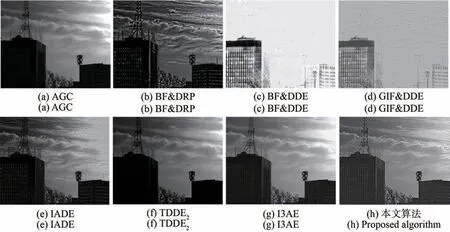
图7 场景2中的对比实验结果Fig.7 Comparison experimental results of sence 2
如图8所示,场景3是经典海天场景,在天海交接处有多只渔船。AGC、BF&DDE、GIF&DDE、TDDE2和I3AE都在海天交接处出现一定程度的过增强,导致部分渔船不可见。BF&DRP虽然完好地保留了渔船影像,但也放大了天空噪声。IADE和本文算法都很好地保留了渔船影像、抑制了天空噪声,相比之下,本文算法处理结果中渔船对比度更高。

图8 场景3的对比实验结果Fig.8 Comparison experimental results of sence 3
4.2 客观评价
为了进一步客观评价本文算法的有效性,选择平均梯度和基于感知的图像质量评价(Perception-based Image Quality Evaluator,PIQE)[14]对各种算法结果定量评价。
平均梯度在一定程度上反映了图像细节多少,平均梯度越大,图像细节越多,反之亦然。平均梯度可以表示为:

其中,Gm表示图像平均梯度,fx和fy表示待测图像的水平梯度和竖直梯度,N表示梯度图像像素数。图6~8中不同算法的平均梯度计算结果如表1所示。可以看出,对于场景1和场景2,GIF&DDE平均梯度值最高,然而对于这两个场景,GIF&DDE都有严重失真。除这两个场景的GIF&DDE结果外,本文算法的平均梯度最高。相对于目前先进算法IADE,本文算法的平均梯度平均提高了35.3%。

表1 不同算法的平均梯度Tab.1 Average gradient of various algorithms
PIQE通过计算空间显著区域的图像失真来评价图像质量,PIQE越小表示图像质量越高,反之亦然。本文利用Matlab自带的piqe()函数计算各算法结果的PIQE值。图6~8中不同算法的PIQE结果如表2所示。可以看出,在3种场景下本文算法的PIQE值均最小,这表示本文算法处理结果具有更高的图像质量。相对于目前先进算法IADE,本文算法的PIQE值平均提高10.7%。

表2 不同算法的PIQETab.2 PIQE of various algorithms
表3列出不同算法的运行时间,按平均运行时间从小到大排列,其中运行时间是10次运行的平均时间。可以看出,本文算法运行速度优于TDDE2、BF&DRP和BF&DDE,劣 于 其 他4种算法。

表3 不同算法的运行时间Tab.3 Runtime of various algorithms (s)
综上所述,相比于经典和先进算法,本文算法不仅在3种场景下均获得了视觉效果更好的结果,还获得了更好的平均梯度和PIQE值,这说明本文算法处理效果具有更丰富的图像细节和更高的图像质量。本文算法如何进一步加速以及如何在嵌入式平台上实时处理,将是接下来需要研究的内容。
5 结 论
本文提出一种基于自适应引导滤波的红外图像细节增强算法,利用设计的参数自适应引导滤波将输入图像分解成基础层和细节层,利用平台直方图均衡化压缩基础层动态范围,利用掩膜加权和γ变换抑制细节层噪声并增强图像细节。实验选取了5种经典和先进算法做对比,针对高动态范围场景、复杂室外场景以及海天场景红外图像进行实验。结果表明,本文算法具有较强的场景适应性,获得了更好的增强效果;相比于目前先进算法,本文算法在平均梯度上平均提高35.3%,在基于感知的图像质量评价指标PIQE上平均提高10.7%。
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
数学物理学报(2021年6期)2021-12-21 06:24:38
应用数学(2020年2期)2020-06-24 06:02:50
数学年刊A辑(中文版)(2019年1期)2019-01-31 02:35:44
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:52
数学杂志(2018年5期)2018-09-19 08:13:48
计算机工程(2015年8期)2015-07-03 12:20:21
数学年刊A辑(中文版)(2014年5期)2014-11-01 05:43:38