一种相机总线数据仿真系统改进研究
2022-09-07 00:41:00赵育良王淑娟王颖颖
宇航计测技术 2022年4期
赵育良,王淑娟,王颖颖
(海军航空大学青岛校区,青岛 266041)
1 引 言
近年来,为满足海军航空装备战略发展的需要,新型侦察装备的性能和自动化程度得到跨越式发展,侦察系统需要实时获取飞行高度、速度、地理坐标、姿态等信号,以满足侦察设备自动调焦系统、像移补偿系统及数据记录系统等子系统的需要,航空相机与其他机载设备的交联程度大大加深。 为了满足航空侦察装备内场检测的要求,需在内场工作房中即可提供所需的总线数据,解决无法在地面检测总线数据端口及上述子系统状态的问题。 前期已研制了以51 单片机为核心,辅以HS3282 和HS3182 等接口芯片以及M-240128T 液晶显示的总线数据仿真系统,该系统虽能基本满足某侦察设备地面检测的需要,但接口电路复杂、可靠性较差、体积大,且使用模式固化,一定程度上制约了仿真系统效益的发挥。 基于此,本文以PC104 嵌入式系统为核心,利用ZHHK429-PC104-Plus 板卡和自研的ARINC407 接口卡,结合25.4cm(10 in)工业级触控彩色显示屏对原系统进行了改进设计,使其具备结构简单、可靠性高、便携及使用模式灵活等特点。
2 系统总体设计[2 -5]
该相机主要装备在某运输机平台,是由前续型改进实现的。 相机改进后,实现了相机的全数字控制,并与飞机大气数据计算机、惯导设备交联,自动引入飞机速度v 和飞行高度H,还提供了GPS 作为备份设备,当交联系统故障时提供所需数据,大大提高了相机的自动化与准确性,为获得高分辨率提供了保证。 同时,相机还将经度、纬度、高度、飞机姿态等信息送入相机数据记录系统,使获取的照片信息更加丰富,为后续对相机所摄取照片的判读及情报生成提供了重要的支撑。
相机系统的组成如图1 所示,某型侦察设备所对应的飞机平台与之交联的设备主要有机载惯性导航设备和大气数据计算机, 惯导设备以ARINC561 标准规范输出经度、纬度、速度、航向等总线数据,并经总线数据交联盒转换成ARINC429总线数据格式,提供给相机系统,大气数据计算机则依据ARINC407 标准,为相机系统提供高度数据,以保证航空侦察设备相应子系统的正常工作。为了实现上述两类总线数据的模拟,使相机系统能够在地面完成通电检查的维护工作,改进的总线数据仿真系统以PC104 嵌入式系统为核心,通过ZHHK429-PC104-Plus 板卡,按照HB6096-86 标准要求,实现机载惯性导航设备ARINC429 总线数据的模拟发送,通过PC104 嵌入式系统所提供的串口设备与自研的ARINC407 总线数据接口板实现信息交互,并实现大气数据计算机ARINC407 总线数据的模拟发送。 模拟的总线数据主要包括飞行速度、飞行高度、经度及纬度等。 整个总线数据仿真系统以嵌入式工业控制计算机为核心,通过ARINC429 总线数据板卡、ARINC407 总线数据仿真板及A/D 数据采集卡,辅以串口通讯板、开关电源及外部接口端子板等,实现两类总线数据的模拟输出,其系统总体组成框图如图2 所示。

图1 相机系统的组成示意图Fig.1 Schematic diagram of a camera system
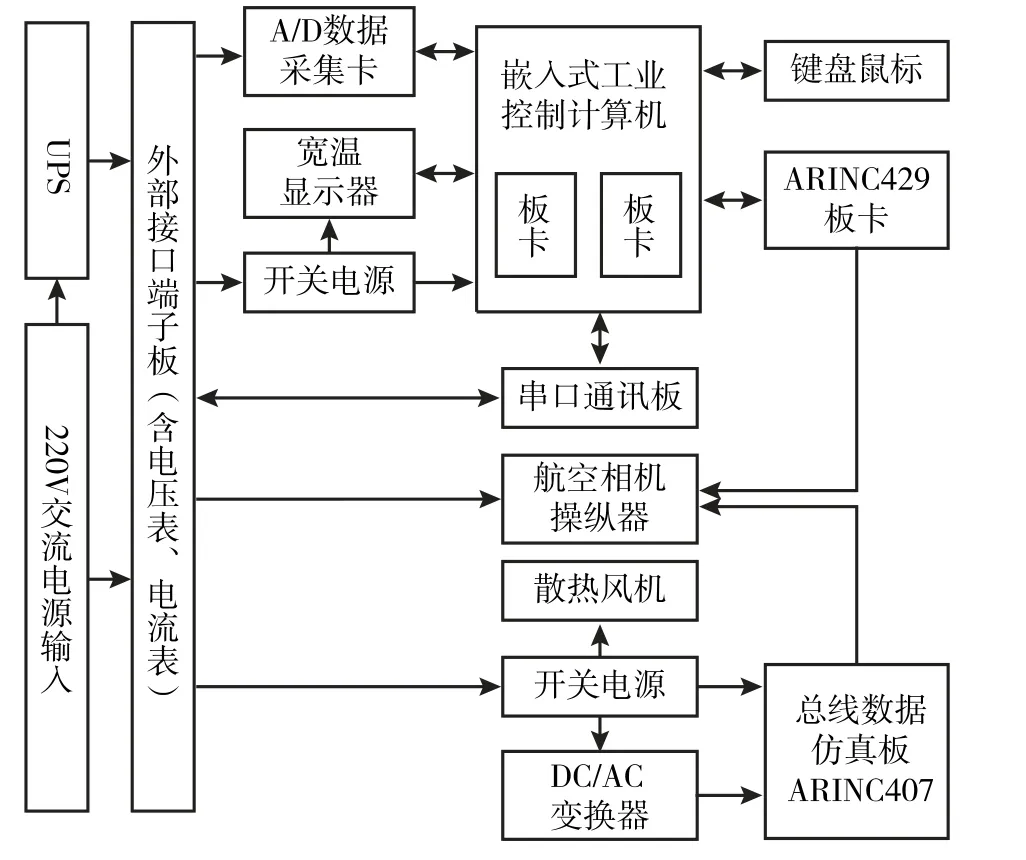
图2 总线数据仿真系统组成框图Fig.2 Block diagram of the system composition
3 系统硬件设计[6 -11]
系统硬件的构建是基于研祥PC/104-Plus 工控机104-1816CL2NA 虚拟仪器系统实现的,根据功能设计要求,分为串口数据通讯模块、ARINC429 总线接口模块、ARINC407 总线接口模块、AD 数据采集模块等,这里重点介绍两类总线接口模块的设计。
3.1 ARINC429 总线数据的模拟[12,13]
飞机上惯导输出数据为ARINC561 数据,经过交联盒转换成标准的ARINC429 总线数据,将经度、纬度、速度等数据送至相机操纵器。 因此,总线数据需要按照相应的通信协议对其进行模拟发送。作为一种串行航空总线数据,ARINC429 总线数据规范是由美国航空电子工程委员会(AEEC)制定的。 总线以双绞屏蔽线为传输介质进行单向广播式异步传输,每条总线上允许有1 个发送器,最多可以挂接20 个接收器,总线利用标志码来区分设备及相关信号的名称。 传输速度分高低两档,分别是100 Kb/s 和12.5 Kb/s,以脉冲的形式发送,采用双极归零的方式进行调制,如图3 所示。
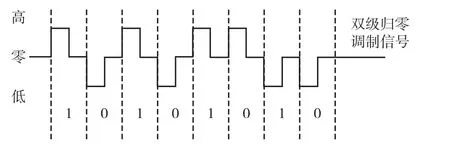
图3 ARINC429 双极归零信号Fig.3 ARINC429 bipolar return⁃to⁃zero
ARINC429 的每个数据包(帧)共包含32 位数据,先传输低位,后传输高位,在连续传输的字与字之间至少要有4 个数据位的时间间隔。 32 位数据由五个基本区域组成,分别为奇偶校验位(32)、符号状态位(29-31)、数据位(11-28)、源/目的标识码(9-10)及标志位(1-8),如图4 所示。

图4 ARINC429 的数据组成Fig.4 Data composition of ARINC429
ARINC429 总线数据的模拟可以通过多种方法实现,例如,使用单片机结合HS-3282 芯片(以及HS-3182 芯片)实现。 但是其电路结构复杂,自身为16 位数据总线,还需要另外设计逻辑电路来转化为8 位数据总线,增加了硬件电路的复杂程度。 基于此,本项目使用PC104 工控机驱动板卡产生ARINC429 信号的方法,在满足ARINC429 总线规范要求的同时,避免了硬件电路系统的复杂化,同时增加了系统的可靠性。
ARINC429 总线接口模块设计使用ZHHK429-PC104-Plus 宽温总线板卡,提供标准的DLL,包含大量接口函数,包括ARINC429 的所有基本操作,支持多语言开发平台。 PC104 工控机驱动板卡可产生ARINC429 电平信号。 系统通过主程序设置经度、纬度、航向、速度等机载设备数据,按照预定的协议对其进行编码,通过总线数据板卡实现双极归零码的格式转换,然后将转换后的ARINC429 数据发送至相机操纵器,由操纵器的总线数据接口板接收数据,完成ARINC429 数据的模拟发送。
ZHHK429-PC104-Plus 宽温总线板卡使用前无需再进行硬件配置,其初始化过程完全是由软件设置完成的。 而对于基地址,不是板卡自动分配的,需要利用跳线对板卡手动配置。 该板卡使用Memory空间,通过跳线设置基址,其空间大小为4 Kb。 如0xD8000-0xD8FFF 可用,则通过跳线设置基址为0xD8000。 在本项目中,主要用到的是ARINC429 数据的模拟发送,因此,主要关注其发送功能,选型的板卡是“两收两发”的,即发送通道只有1-4 脚是有效脚(对应2 个发送通道)。 在硬件设计调试中,使用的是其中的管脚1 和管脚2 模拟机上ARINC429总线数据的发送。
3.2 ARINC407 总线数据的模拟
某机载大气数据计算机输出的气压高度采用自整角机三线模拟同步信号,自整角机为一种感应式的、具有自动整步能力的微特电动机,实现其机械转角信号与电信号之间的相互转换,精度和可靠性高,可在恶劣环境下工作,在航空装备中得以广泛应用。 自整角机模块将信号送往相机操纵器的总线数据接口板,完成ARINC407 总线数据的接收与转换。 相机适配板采用12ZSZ 自整角机/数字转换模块,将大气数据计算机送入的自整角机信号进行模数转换;同时,由操纵器的总线数据端口的第13、14 脚引入26 V、400 Hz 的参考交流信号。 为了与之匹配,本项目设计的ARINC407 总线数据模拟,是通过自行设计的以12SZZ 数字/自整角机转换模块为核心的ARINC407 总线数据接口板实现的。
根据上述功能设计需求,ARINC407 总线数据接口板主要由AT89C52 单片机、12SZZ 数字/自整角机转换模块和逆变电源模块组成。 其中,单片机采用的是AT89C52 单片机,主要完成两个功能:一是通过串口实现与PC104 嵌入式单板机的通讯,当接到数据发送指令时,完成高度数据的接收及更新;二是利用地址锁存功能,将高度数据转化成12位数字信号送入12SZZ,形成自整角机信号,通过总线数据接口将数据送入操纵器。 接口板上的逆变电源除了给12SZZ 提供26 V、400 Hz 交流参考信号,还同时给相机操纵器中的适配板提供参考信号。
ARINC407 总线数据接口板电路原理图的局部电路如图5 所示。 为了增强单片机的驱动能力,在电路的数据总线中加入了74LS245 芯片。 由于接口板中所使用的单片机为8 位单片机,而12SZZ 则是12 位精度的转换器,因此需要利用74LS373 锁存器分别对P0 口输出的低八位和高四位数据进行锁存输出,从而将模块需要的12 位数字量输入并完成转换后,进行模拟发送。
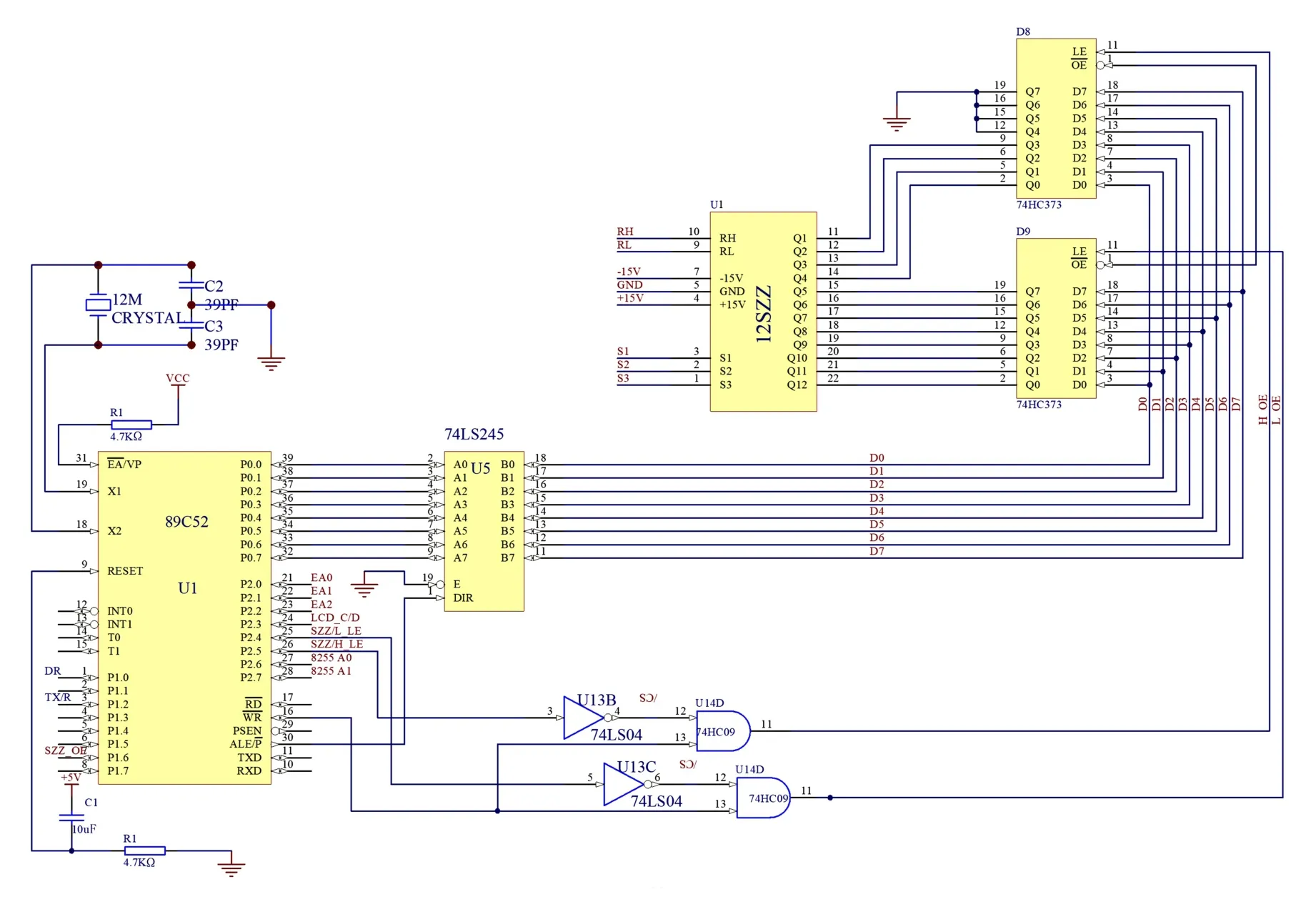
图5 ARINC407 总线数据接口板电路原理图(局部)Fig.5 ARINC407 bus data interface board circuit schematic(partial)
4 系统软件设计[15]
总线数据仿真器的软件部分主要完成数据的输入、处理、发送及显示等功能。 软件是基于Windows Embedded XP 操作系统结合LabVIEW 图形化编程软件开发的,该操作系统具有可靠性高、实时性强的特点,适合高速数据采集及信号处理需求,而LabVIEW 则提供了与示波器及万用表等传统仪器极其相似的控件,其丰富的函数库对接口控制、数据处理与显示有良好的支撑作用,可以方便地设计定义图形化界面。 软件首先对总线数据仿真板卡进行参数配置,再按照ARINC407 及ARINC429 协议,将待发送数据经过转换后发送到接收设备(相机操纵器)。
对于某机载航空相机系统,通过操纵内部的总线数据接口板,结合交联盒实现与机载惯导设备交联,实时以12.5 Kb/s 的速率接收记录并分发经度、纬度、速度及姿态等ARINC429 总线数据信息。 总线数据仿真系统则需按照相关协议要求,将预设数据以同样速率和ARINC429 总线数据格式定时向操纵器发送。 因此,工控机端主程序要实现包括数据设置、数据编码以及驱动PC104 板卡将预设数据转换成双级归零信号,并将其定时发送至操纵器相关总线数据端口的功能。
为了实现上述功能,主程序需引用ZHHK429-PC104-Plus 板卡提供的动态链接库及相应的头文件,并通过动态库封装的接口函数ARINC429_Open、ARINC429_Reset、RX_Configure、TX_Configure等实现板卡的驱动及总线数据的发送。 首先打开并复位板卡,复位发送通道并对其参数进行设置,启动发送器使能后,发送预设的总线数据,其程序流程如图6 所示。

图6 ARINC429 总线数据发送流程图Fig.6 ARINC429 bus data transmission flow block diagram
根据软件设计要求,系统还专门设计了ARINC407总线数据接口板,实现高度数据的模拟发送,工控机通过串口通讯板,将预设高度数据传输至ARINC407 总线数接口板,接口板则通过单片机IO口接收来自工控机A/D 转换卡的通讯请求信号,一旦收到信号, 即将缓存中的高度数据刷新。ARINC407 总线数据接口板的核心是8 位51 单片机及12SZZ 转换模块,系统通过锁存器实现了锁存输入12 位数字量,12SZZ 模块则将12 位数字量转换输出三线同步器旋变模拟信号,根据数字定义,其满量程为4096,再根据其协议中定义的高度值,可解算出1 个量化值对应的实际高度值。
根据上述硬件设计,12SZZ 转换模块的高8 位锁存地址为0xefff,而低8 位锁存地址为0xdfff。 这样,单片机只需对上位机给定的高度数据按要求转换,并分别将数据送入相应的数据端口即可。
unsigned char xdata SZZ_H1 _at_ 0xdfff;/ /定义低8 位数据外部地址
unsigned char xdata SZZ_L1 _at_ 0xefff;/ /定义高8 位数据外部地址
LongtoData(T_long_gd);/ /数据格式转换
SZZ_LH =1;/ /发送使能
SZZ_H1 =tmptdda[1];
SZZ_L1 =tmptdda[0];
SZZ_LH =0;/ /使能关闭
5 系统测试
按照系统方案的技术指标要求及相关测试大纲,对系统进行测试,测试内容主要包括:
(1)利用总线数据仿真器,设置并发送两类航空总线数据,比对设置数据及操纵器显示数据,判定发送数据的准确性及精度;
(2)持续开机12 h,测试系统的稳定及可靠性;
(3)请专业人员按规程操作,测试人机交互界面。
经12 h 以上的连续运行测试未发现异常现象,各级导航界面视觉效果好,操作程序简便,系统稳定可靠。 与原总线数据仿真系统相比,采用图形化界面,人机体验更好;重量减小近1.5 kg,体积更加紧凑,便携性更好;采用工业级板卡和宽温显示设备,可靠性更高;新系统能够依据相关规程要求完成总线数据模拟,符合设计要求。
6 结束语
基于PC104 嵌入式系统的新型便携式飞机导航数据仿真器,利用ZHHK429-PC104-Plus 板卡和自研的ARINC407 接口卡,结合25.4 cm(10 in)工业级触控彩色显示屏,对原系统进行了改进设计,实现了机载惯导设备和大气数据计算机的数据仿真输出,使相机在工作间内即可完成全状态通电。经测试,与改进前的设计相比,其人机交互体验更好、可靠性更高、便携性更好,为新型侦察装备效能的发挥起到重要支撑作用。
猜你喜欢
轨道交通装备与技术(2020年5期)2020-11-02 12:13:14
科技创新导报(2019年4期)2019-06-10 09:35:31
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
测控技术(2018年8期)2018-11-25 07:42:08
火控雷达技术(2016年3期)2016-02-06 02:30:33
电子设计工程(2015年8期)2015-02-27 12:05:26
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
河南科技(2014年16期)2014-02-27 14:13:22