光学捷联基准导航计算机设计与实现
2022-09-07 00:40:58黄平华张兴凡
宇航计测技术 2022年4期
霍 庚,黄平华,张兴凡
(中国人民解放军92941 部队,葫芦岛 125000)
1 引 言
捷联基准系统的主要任务是为大型舰船武器系统的基座提供姿态基准。 基准信息主要包括三轴姿态信息和角速度信息,是一种纯自主的捷联式惯性导航系统。 在卫星导航定位系统与测流仪辅助下进行导航解算,从而构成导航系统,以提高捷联基准的精度。 作为捷联基准的数学计算平台,导航计算机需要完成对惯性器件的数据采集,并根据相应的数据及参数完成实时导航解算,并将导航姿态参数提供给外部使用。 因此,它需要实时处理大量原始数据,如惯性测量单元中陀螺仪和加速度计的原始数据预处理、卫星导航定位系统位置信息解析与融合、导航解算,还要完成与外部导航应用设备的数据交互等任务。
光学捷联基准的惯性器件是光纤陀螺,可靠性、实时性较高,对导航计算机(ENC)的功能、性能需求也越来越高。 以往基准系统的导航计算机主要以PC104 处理器为体系架构,但是PC104 架构的计算机体积较大、功耗高、系统程序复杂、可移植性低、成本高,计算性能受主计算机的硬件性能限制。 目前通常采用DSP +MCU(微控制器)组合的方式作为ENC 的核心,DSP 作为主计算机,负责数据的处理与导航解算,MCU 负责数据的采集,该方式处理速度慢、可靠性低,实用性还有待提高。针对新型光学捷联基准对ENC 实时性要求高、工作功耗低、尺寸小的需求,本文设计了一种基于DSP和FPGA 为核心处理器(DSP +FPGA)的嵌入式导航计算机。 在硬件设计方面对信息处理模块和数据通信采集模块进行了考虑,凸显了DSP 高频运算实时性及FPGA 多路并行的优点,两者相结合的应用,体现了嵌入式组合ENC 的优势。 在软件上,重点研究了基于船用主惯导航向与计程仪速度组合的Kalman 滤波算法设计,并将该ENC 应用到实际样机中,进行了半物理仿真验证试验。
2 ENC 硬件设计
新型光学捷联基准导航计算机实时性很高,需要同时完成传感器的原始数据同步采集、实时导航及姿态解算、导航姿态信息输出等多个任务。 ENC系统包括:惯性传感器IMU、DSP +FPGA 双架构处理器、外挂FLASH 及DDR、外围设备接口电路。 陀螺仪及加速度计数据经FPGA 按照1 kHz 的频率进行循环采样处理后,先进行信号的预补偿,然后将数据信号进行整合和处理,并将数据写入到FPGA内部的双口随机存取存储器(RAM)中,DSP 则通过外部存储器接口(EMIF)总线直接读取相应RAM地址中的各种数据,并在内部进行滤波及导航解算,待解算完成后,DSP 将实时计算出的航向角、水平姿态角、角速度等信息写入双口RAM 回传给FPGA,FPGA 将导航数据通过外围接口进行对外发送。
按照系统功能分类,可将ENC 硬件系统主要划分为两个核心模块:导航信息处理模块(MPM)和数据采集通信模块(DCM),如图1 所示。

图1 导航计算机硬件结构框图Fig.1 Hardware structure diagram of navigation computer
2.1 MPM 的设计
MPM 主要由DSP、DDR2、NAND Flash、晶振电路、总线驱动电路等组成。 采用基于嵌入式DSP处理器设计的高性能DSP 模块作为导航系统计算单元的核心,主要用来快速完成对实时数据的处理及导航解算,需要具备高性能浮点运算能力;扩展内存采用高性能的DDR2 以辅助DSP 在进行大量数据运算时需要的计算空间;NAND Flash 为外扩存储器,主要存储软件编译文件及导航系统的各类补偿参数;晶振时钟电路为DSP 和FPGA 提供稳定可靠的时钟基准信息;所采用的EMIF 总线驱动电路主要用于外部FLASH 及DDR 的读写,同时实现对FPGA 内部各双口RAM 模块的读写,以实现DSP 和FPGA 之间的高速数据传输。
本模块的设计在选用核心处理器时,考虑了导航信息计算机要进行各种航姿信息解算时的运行速度及运算量。 因此,将选用高性能支持浮点运算的DSP 芯片作为核心处理器。 同时需要兼顾处理器本身正常使用时的功耗、尺寸、价格等多种因素。目前常用的DSP 主要有TI 公司的TMS320C6713、TMS320C6748、TMS320C6678 等型号。 其中,C6713为单核处理器,主频为300 MHz,其性能有限,不符合高性能解算的要求,且封装尺寸较大,不符合小型化的要求;C6678 为多核处理器,单核主频能够达到1 GHz,具备高性能的处理能力,但其功耗较大,价格昂贵,不适用于惯性导航系统使用;C6748 具有专用浮点数计算的硬件乘法器,支持高速的浮点数运算,主频最高为每秒456 MHz,具有高达3648 MIPS 的性能和最高2746 位MFLOPS 的高速运算的能力,能满足设计对运算实时性的要求,目前广泛应用于惯性导航领域。 C6748 在成本与功耗方面的优势也是本设计选择的理由之一,它是目前最低成本与最低功耗的C6000 系列处理器以及最低功耗的浮点DSP。 因此,本设计采用了TMS320C6748芯片来作为光纤捷联基准导航计算机的主处理器。
导航信息处理模块导航运算量较大,但DSP 处理器自带的RAM 空间局限,不能满足运算需求,需要扩展外部同步动态随机存取内存(SDRAM),增大存储空间。 主处理器TMS320C6748 芯片有支持JESD79-2A 标准的DDR2 接口,因此,本方案将选择外扩DDR2 来增大运算空间,其芯片型号为MT47H128M16RT,该DDR2 支持扩展存储容量达256 MB,可满足导航信息处理器对数据存储的缓存处理需求。
TMS320C6748 芯片由于自带的只读存储器(ROM)空间比较有限,难以同时满足导航计算机中对程序数据存储功能和复杂系统参数信息存储能力的扩展需求,需要适当扩展一些外部空间或者其他外部存储器,实现复杂程序的存储扩展和复杂系统参数存储。 当导航计算机上电时,从外部FLASH将用户程序导入到内部RAM 运行,同时将误差参数从外部FLASH 读取至软件内,配合导航解算,保证导航系统正常输出精度。 本设计选用的NAND Flash 外扩存储器芯片为三星公司的K9F4G08U0M,用于导航程序和解算数据的存储,扩展存储空间为512 M,工作额定电压为2.7 V ~3.6 V。
2.2 DCM 的模块设计
DCM 包括FPGA、AD 采样电路、SPI 通讯模块等部分。 DCM 可以完成对光纤陀螺仪、加速度计、卫星导航定位系统接收器等多种外部高精度导航测量传感器信息的采集。 同时完成与上位机的数据交互(作用指令的接收及数据输出),供终端用户使用和分析信息。
本设计中的FPGA 采用赛灵思Spartan-6 系列XC6SLX45T 芯片,该型号器件采用高性能低功耗45 nm 芯片技术,多层金属布线、双栅极氧化层工艺,实现了低风险、低功耗、高性能的平衡处理需求。 XC6SLX45T 的Logic Cells 数量为43 661 个,Max Distributed RAM 可达401 kB,最大用户I/O 可达296 个,完全满足数据采集通信模块的设计要求。
ENC 系统采用RS-422 接口作为与其他外围设备数据通信的接口,RS-422 传输线缆采用双绞方式,具有信号传输距离远、抗环境干扰性强、速率高等优点。
模块软件设计基于Verilog 语言,在FPGA 芯片内部针对不同功能需求进行逻辑编程,如串口、SPI、双口RAM 模块的编程。 扩展的SPI 通信模块,用FPGA 芯片内部的双口RAM 数据缓存,通过调节相应的通信管脚输入以及通信协议,来满足不同接口的传感器的数据采集。 FPGA 可进行重新编译,不仅使整个系统接口多样化、功能性能稳定可靠,同时方便升级硬件电路,具有良好的移植性和扩展性。
数据通信模块内部关系如图1 中数据采集模块部分所示,SPI 采集陀螺输出数据及控制AD 采样电路实现对加速计的信号采集,采集数据存放在双口RAM 中。 RS-422 通信通过UART 串口模块完成数据收发并通过双口RAM 缓存。
3 基于主惯导和速度组合的Kalman滤波器设计
本设计中考虑了为解决由于中低精度惯性器件(陀螺仪和加速度计)长时间工作误差积累造成系统精度下降的问题,结合捷联基准设备的使用条件,采用将外部信息源与捷联基准进行航向与速度组合导航的方案来抑制工作时间对系统精度的影响。 同时,利用Kalman 滤波技术将主惯导航向与捷联基准输出的航向及计程仪速度与捷联基准输出的速度误差列为观测量,并在进行试验的过程中对导航解算过程中的误差量实时估计,同时对误差估计值进行修正、补偿。
3.1 基于主惯导组合导航的状态方程
系统的状态方程为

式中: F——状态转移矩阵; X——状态变量;G——系统噪声分配矩阵;W——系统噪声。

式中:φ——姿态误差;v——速度误差;ε——光纤陀螺仪常值漂移量;ΔA——加速度计的零偏;λ——陀螺安装误差。
状态量中包含了3 个速度误差、3 个姿态误差、3 个光纤陀螺仪常值漂移量、3 个加速度计的零偏、陀螺仪正交误差和随机误差,本方案只考虑加速度计的随机误差和陀螺仪随机漂移量误差模型,则

噪声方面考虑在载体坐标系下加速度计与光纤陀螺的随机漂移分量。 为了简化模型,初步认为陀螺的随机漂移为白噪声加上随机常数,即

式中:ε——随机常值;w——白噪声。 其中,ε的每次的启动值是随机变化的,但每次启动后其值是不变的,因此


由于机械的应力释放会导致惯性测量单元(IMU)中陀螺正交误差发生变化,尤其在海上动态摇摆条件下,由于倾斜角度变大,该误差被放大,正常情况安装误差应该是6 个量,本方案以陀螺X 轴为约束轴,选3 个安装误差量进行在线估计补偿,即λ =[λλλ],这样可以优化Kalman 滤波器维数,减小计算量。
3.2 主惯导航向+速度组合导航量测方程
舰船上通常使用主惯导系统提供精度较高的导航信息,但由于捷联基准安装位置和主惯导之间会存在甲板变形和安装误差,导致捷联基准测量局部姿态与主惯导存在差异,因此,将主惯导的航向与捷联基准的航向误差取为观测量,同时,将捷联基准输出的速度与计程仪的速度差值也作为观测量,这样可以提高对陀螺漂移和航向失准角的估计精度,既可以抑制捷联长时间工作航向的漂移,也可以抑制水平姿态振荡。
系统的观测方程为

式中:Z——观测向量;V——捷联基准输出的速度与计程仪的速度差值;φ——主惯导的航向与捷联基准的航向误差。

捷联系统输出的航向角方程

式中:ϕ——航向角,();ϕ——真实航向角,(°);δϕ——捷联系统航向角误差,(°)。
主惯导输出的航向角方程为

式中:ϕ——输出航向角,(°)δϕ——主惯导航向角误差,(°)。
4 半实物仿真及验证
根据建立的模型,运用半实物仿真,为了验证ENC 硬件方案的可行性和基于主惯导航向和速度组合Kalman 滤波器设计的正确性,在基于FPGA 和DSP 双处理器的ENC 上实现该功能,并将该ENC应用到捷联基准样机中,通过半实物仿真试验进行验证。
将样机安装在三轴转台上,装订航向信息和速度信息。 光纤捷联基准在组合模式下,将转台内框设置为±22°/0.1 Hz,中框设置为±7°/0.143 Hz,外框设置为±5°/0.2 Hz,模拟舰船在六级海况条件下的工作情况,陀螺零偏0.03°/h,加表零偏50 μg,数据更新频率为200 Hz,仿真时间为600 s,得到航向角、纵横摇角误差仿真曲线如图2 ~图4 所示。纵摇(Pitch)、横摇(Roll)及航向角(Yaw)误差在10 min内能快速收敛。 经测试,设备与转台数据同步时差控制在0.1 ms 以内,远低于PC104 方案的1.2 ms。
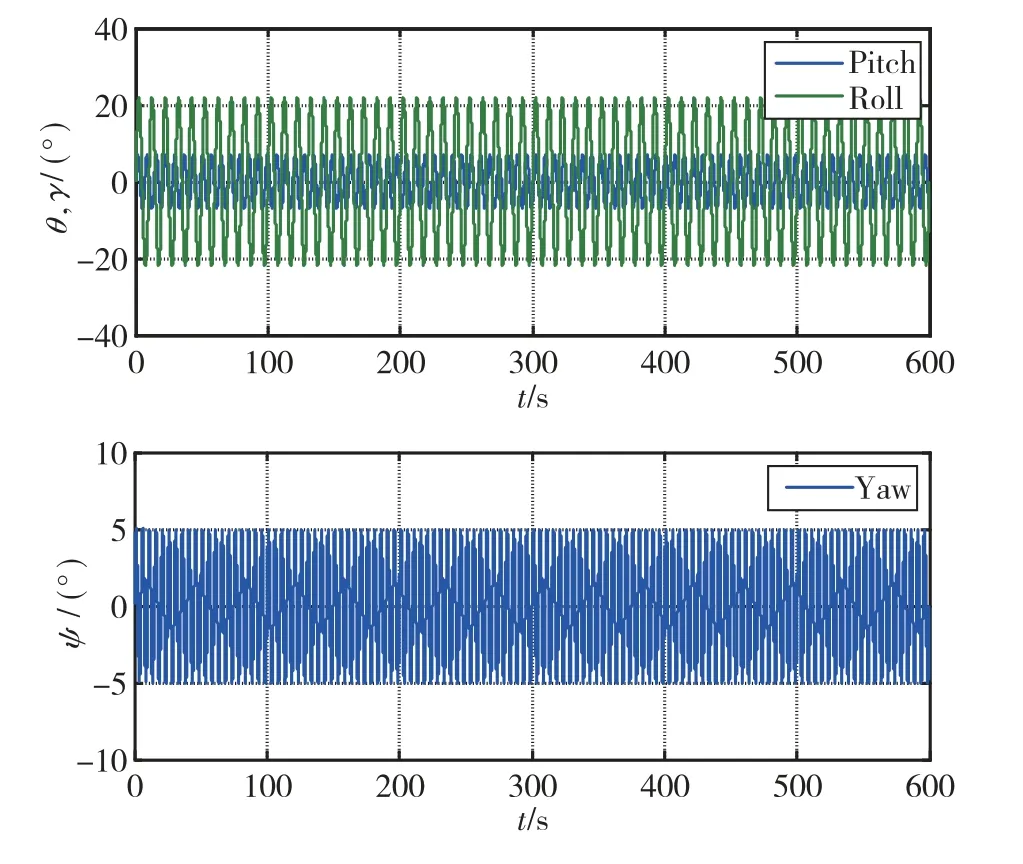
图2 捷联基准纵横摇角和航向角摇摆曲线Fig.2 Swing curve of strapdown reference attitude angle

图3 三轴转台摇摆曲线Fig.3 Swing curve of three axis turntable

图4 捷联基准以转台做参考误差曲线Fig.4 Strapdown standard simulation error curve
捷联基准样机安装在舰船的某一基座上,主惯导提供航向、纵横摇信息,电磁计程仪提供速度信息。 在系泊的状态下,对捷联基准进行数据录取,对录取的IMU 数据进行解算并将与主惯导输出的姿态值进行比较。 误差曲线如图5 所示,纵、横摇角误差及航向角误差均控制在航向角随机误差0.039 mrad,纵摇角综合误差0.163 mrad;横摇角综合误差0.097 mrad 的范围内。

图5 航向角误差曲线Fig.5 Strapdown standard error curve
5 结束语
本文针对光学捷联基准解算精度高、工作功耗低、外形尺寸小型化的需求,设计了一种基于DSP与FPGA 作为核心单元的嵌入式导航计算机。 该硬件方案采用DSP 芯片TMS320C6748 实现导航解算,采用Xilinx Spartan -6 系列FPGA 芯片实现数据采集和通信,在计算能力、硬件升级等方面都有很好的性能,克服了导航计算机平台在运行能力、体积、功耗和成本等方面的限制。 同时,为解决长时间工作对系统精度的影响,研究了基于主惯导航向和计程仪速度组合的Kalman 滤波器设计。 通过三轴转台和系泊状态下半实物仿真试验,结果表明该导航计算机系统数据更新率和同步实时性高,可以满足光学捷联基准系统的使用要求,同时验证了基于主惯导航向和计程仪速度组合的Kalman 滤波器设计的科学性。
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
电子制作(2017年24期)2017-02-02 07:14:16
公民与法治(2016年19期)2016-05-17 04:18:15
火控雷达技术(2016年1期)2016-02-06 02:18:01
读者·校园版(2015年7期)2015-05-14 13:11:40
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
法大研究生(2015年2期)2015-02-27 10:13:55