
车载单目摄像机下地铁轨行区检测与提取
2022-09-06 08:46谭飞刚余志立刘开元
铁道标准设计 2022年9期
谭飞刚,余志立,刘开元,李 汀
(深圳信息职业技术学院交通与环境学院,深圳 518172)
引言
目前,我国地铁进入快速发展阶段,截至2020年年底,全国45个城市开通城市轨道交通运营线路总长7 978.19 km[1],其中地铁6 302.79 km。安全、快速、准时等特点使得地铁成为居民出行交通工具首选。以深圳为例,地铁客流量由2016年的12.97亿人次,增长至2019年的20.21亿人次,客流量增长了55.8%(2020年因疫情影响不作参考),公共交通的主体由常规公交向地铁转变。地铁的安全、快速使得其运行环境对线路界限有非常严格的要求[2-4]。地铁线路异物入侵对轨道交通安全运营构成巨大威胁,轻则中断行车影响乘客出行,重则出现财产损失和人员伤亡事故[5-6]。2017年12月6日,深圳地铁11号线隧道被打桩机打穿异物坠落,导致中断行车13 h;2018年6月26日,北京地铁机场线因大风吹入钢板至轨行区导致接触轨停电,导致多趟列车延误。因此,地铁异物侵限被定为行业一级防灾响应[7-9]。因地铁线路异物入侵具有突发性、线路环境复杂、破坏力巨大等特征,使得地铁轨道异物侵限自动检测技术面临巨大挑战[10-11],如何利用科学技术实现异物侵限智能检测与预警是当前轨道交通运输亟待解决的难题[12-13]。
目前,国内外轨道交通异物入侵检测方法主要有接触式和非接触式两类[14]。接触式检测技术主要包含单电网检测、双电网传感器检测、光缆传感监测技术、光纤光栅防护网技术、倾角传感器;非接触式检测技术主要包含主动红外入侵探测、激光入侵探测、雷达式微波检测、对射型微波入侵探测、超声波探测、固定区域视频监测等。这些检测技术存在对于落在轨道上的静态异物无法测量,设备固定在轨道旁,只能实现固定区域有限距离检测等缺陷[7]。
随着机器视觉的快速发展,基于视频的轨行区异物自动检测,特别是基于车载摄像机轨行区异物检测成为当前研究的热点[15-16]。轨行区检测与提取作为检测算法的第一步,目前主要有2种方法:基于累计灰度阈值,基于边缘检测和霍夫直线检测算法。基于灰度阈值检测算法容易受光照变化影响,特别是阴影覆盖不同轨道时,影响轨行区提取。基于边缘检测和霍夫直线检测算法,直线检测结果容易受轨旁其他设备轮廓干扰[17-18]。针对霍夫直线检测算法的结果进行修正,解决了轨旁设备轮廓干扰问题。试验结果表明,本文方法具有较高的速度和准确率。
1 算法描述
本文算法整体流程如图1所示,总共包含获取摄像机图像、图像预处理、Canny边缘检测、ROI区域提取、霍夫直线检测、直线坐标调整和提取轨行区7个部分。首先,通过网络摄像机获取列车运行前方图像;然后,进行图像预处理操作,主要包含图像灰度处理、高斯滤波等操作;在此基础上再进行后续钢轨检测与提取操作。

图1 算法流程
地铁轨行区与高铁或普铁线路轨行区不同,其旁边铺设了大量轨旁设备,如线缆、信号机、接触轨、管道等。这些设备在进行轮廓检测时容易对钢轨检测造成很大干扰。如图2所示,图2(a)为某市地铁三号线车载摄像机运行中拍摄画面,图2(b)为Canny算法检测结果。从图2可以看出,轨旁栏杆、围墙及建筑物均检测出丰富的轮廓,为减少其干扰,对边缘图像设置感兴趣区域(ROI)。根据图像大小(1280×720)及轨行区在图像中位置,人工手动设置感兴趣区域的4个顶点位置为(400,720)、(680,300)、(710,300)、(800,720)。
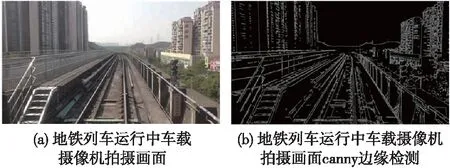
图2 地铁车载视频canny边缘检测示例
1.1 霍夫直线检测
霍夫变换(Hough Transform)由Paul Hough于1962年提出,并由Richard Duda和Peter Hart推广使用,它是图像处理领域内几何形状检测的基本方法之一[19]。Hough直线检测的基本原理在于利用点与线的对偶性[20-21],假如在图像空间中直线由式(1)表示,那么过某一点P(x0,y0)的所有直线参数均满足式(2)。
y=kx+b
(1)
y0=kx0+b
(2)
式中,k,b分别为斜率和截距。
将式(2)转化为式(3),可以看出图像空间中的直线与参数空间中的点为一一对应,参数空间中的直线与图像空间中的点也是一一对应。最后,通过统计特性来实现直线检测。
b=y0-kx0
(3)
1.2 直线坐标调整
将canny边缘检测后的ROI进行霍夫直线检测,其检测结果如图3所示。从图3可以看出,霍夫直线检测虽把钢轨检测出来,但周围区域多出10多条直线,特别还包含多条与钢轨垂直的直线。

图3 霍夫直线检测结果
为避免上述误检,提高检测准确度,对霍夫直线检测结果进行调整,具体描述如下。
(1)计算直线斜率。利用式(4)计算每条直线的斜率。

(4)
式中,(x1,y1),(x2,y2)分别为直线的两个端点。
(2)利用式(5)的条件对直线进行左右分类,同时排除水平方向直线。因为在图像中y轴向下为正,故若k<-th则将其加入右边直线候选集,若k>th则加入左边直线候选集。其中,th为阈值,k为直线斜率。
(5)
(3)利用式(6)的条件来排除水平偏移大的直线段,即若直线坐标满足式(6)则移除。其中,P(x0,y0)代表直线的一个端点;xl,xr分别为钢轨标注的x方向坐标;t为阈值。
|xl-x0|+|xr-x0|>2t
(6)
(4)求取平均坐标,将左右两个直线候选集中直线端点坐标分别求取x、y方向的平均值,并根据平均值确定最后的直线坐标。
基于上述4个步骤后,本文th取0.3,t取20,得到如图4所示的检测结果。可以看出,消除了所有的干扰直线,只有2条与轨道重叠的直线。
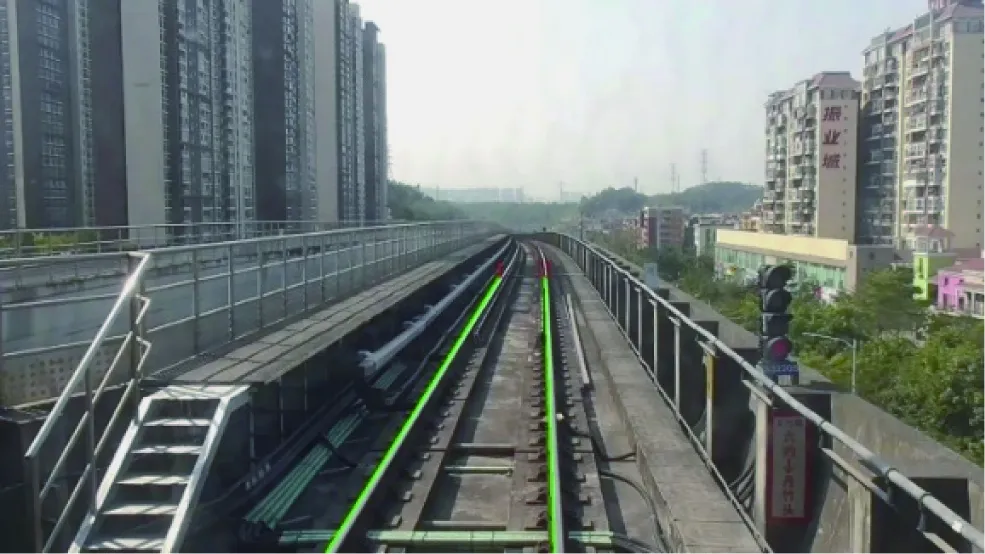
图4 直线坐标调整后检测结果
1.3 轨行区提取
根据直线坐标调整后的结果,提取出左右2条直线的端点坐标,将其组成四边形,其所形成的区域即为轨行区(图5)。由图5可见,两条轨道间的轨行区基本全部准确提取,为下一步轨行区异物检测提供ROI区域,这样不仅可有效减少其他区域的干扰,且减少了数据处理区域,可有效提高处理速度。
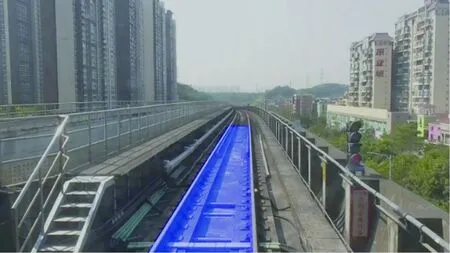
图5 轨行区提取结果
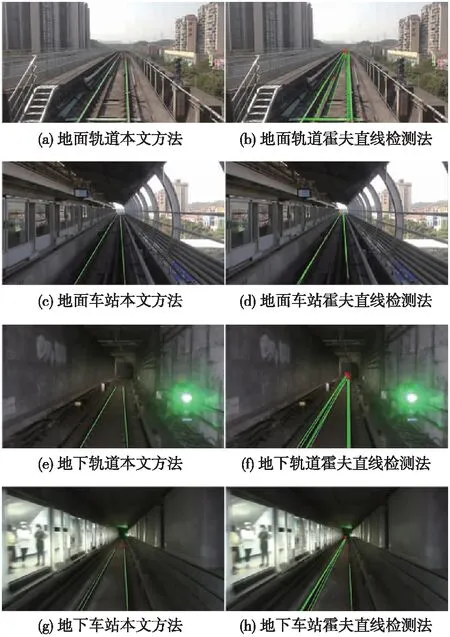
图6 与经典霍夫直线检测结果对比
2 实验
2.1 实验设置
通过在列车驾驶室操纵台前放置一台摄像机,以列车司机视角拍摄列车运行前方画面的方法来采集数据,数据来源于某市地铁3号运营线路,包含地面、高架和地下隧道3种场景。视频总时长3 h,视频分辨率为1 280×720。实验仿真平台采用配置为CPU:Intel i5-8265U,运行内存8GB内存,搭载64位Windows10系统的笔记本电脑,编程环境为python 3.8+opencv 4.1。
2.2 结果分析
根据露天、室内、隧道等场景存在光照、背景环境等差异,选择地面轨道、地面车站、隧道轨道和地下车站4个场景进行检测,其检测结果如图6所示。由图6可见,本文所提方法能准确检测出2条轨道,而经典霍夫直线检测在相同参数条件下,未经任何处理时,会检测出许多额外的直线段。
为评价各算法边缘检测效果,采用区域重叠率进行比较,其计算方法如式(7)所示。

(7)
其中,Au,At分别为算法提取轨行区面积和标注的轨行区面积;p∈[0,1],其值越大,表面算法提取的区域约接近真实区域。
选用文献[20]的方法与本文方法进行对比,其对比结果如表1所示。从表1可以看出,虽然文献[20]的方法在时间上比本文方法稍快一点,但其准确率远低于本文方法。

表1 不同算法对比
3 结论
针对地铁轨行区异物检测关键技术之一的轨行区检测与提取问题,提出一种基于霍夫直线检测的改进方法。通过对霍夫直线检测结果进行处理,根据直线斜率等参数过滤掉水平方向及钢轨偏离大的直线后,构建候选直线集合;然后对候选直线集合进行平均处理,改善直线间断开的问题;从而计算出直线两个端点,准确检测出钢轨,进而有效提取出轨行区域,为后续轨行区的异物检测提供基础。通过对比实验,其结果表明,本文所提方法可有效应对地面区间、地面站台、地下隧道及站台处的轨行区检测。
猜你喜欢
中外文摘(2022年8期)2022-05-17
中老年保健(2021年9期)2021-08-24
中老年保健(2021年4期)2021-08-22
小雪花·成长指南(2021年6期)2021-08-18
昆明医科大学学报(2020年12期)2021-01-26
小学生导刊(2018年13期)2018-11-30
小学生导刊(低年级)(2017年2期)2017-06-10
晚报文萃(2016年7期)2017-01-10
新高考·高二数学(2014年7期)2014-09-18
中华急诊医学杂志(2006年10期)2006-10-24
