
基于变指数趋近律的永磁同步电机滑模控制*
2022-09-01 06:06陈德海曹永康
电机与控制应用 2022年2期
陈德海, 曹永康, 阳 攀
(1.江西理工大学 电气工程与自动化学院,江西 赣州 341000;2.江西理工大学 外国语学院,江西 赣州 341000)
0 引 言
目前,永磁同步电机(PMSM)在航空航天、机器人、新能源汽车等控制领域应用广泛,主要原因是其具有结构简单、器件体型小巧、稳定性高等优点。PMSM的控制策略则影响电机使用性能,因此吸引了一大批学者对其控制方法进行深入研究。
传统的PI控制虽然具有算法简便、易于操作调节、可靠等优点,但是当系统受外界干扰或参数发生变化时,PI控制应变能力不足,抗干扰性较差,鲁棒性差,不能满足系统的实际需求。于是,充分考虑系统各方面的需求特点之后,对其查漏补缺,致其控制策略层出不穷,例如模糊控制[1]、自适应控制[2-3]、神经网络控制[4-5]、滑模控制(SMC)[6~14]等,其中滑模变结构控制具备抗干扰性强、响应速度快、稳定调节时间短等特点,而一般的控制策略不能满足PMSM非线性、多变量、强耦合等特点,因此近年来,国内外学者致力于将滑模变结构控制应用于PMSM控制系统。由于SMC不可避免地会出现抖振、超调等问题,对系统运行有一定影响,研究人员致力于对趋近律进行改进创新,并且以此构造滑模速度控制器,进一步抑制超调和抖振的产生。文献[6]在传统指数趋近律上引入了系统状态变量的幂次方,超调和抖振均得到进一步抑制,但效果稍显逊色。文献[7]将传统指数趋近律的趋近系数设计成倒数关系,系统性能改善明显。文献[8]在指数趋近律的等速项中新加一个关于滑模面s的函数,系统自适应调整能力加强,但趋近律略显复杂。文献[9]用幂次函数以及反双曲正弦函数构造新的趋近律,抖振得到削弱。文献[10]使用新建函数代替传统符号函数,并且引入了一个包含两个状态变量的表达式,优化指数趋近律,降低了系统的抖动程度。文献[11]在双幂次趋近律基础上,增加了自适应项,但是没有考虑外部干扰。文献[12]基于传统指数趋近律,引入了变指数函数和双曲正切函数,提高了系统趋近速度自适应调节能力和抖振抑制能力。文献[13]提出一种带饱和函数的幂次趋近律,系统动态品质得到一定改善。文献[14]在传统指数趋近律上,结合了终端吸引因子和状态变量的幂函数,控制效果得到提升。通过以上文献内容得知,要改善系统超调、抖振等问题,解决方法较多,但或多或少都有其不足之处。
本文设计了一种新的趋近律,在传统指数趋近律基础上,将一个以滑模面s为变量的函数引入等速项中,用以加快系统响应速度,缩短系统响应进程,并优化传统符号函数,对此作了平滑处理,提高控制系统的动态品质。
1 PMSM数学模型
为了方便分析,假设电机元件、条件等是理想的。在id=0的条件下,选取d-q坐标轴下的数学模型,PMSM定子电压方程为

(1)
式中:ud、uq为d轴、q轴定子电压分量;id、iq为d轴、q轴定子电流分量;R为定子电阻;φd、φq为d轴、q轴磁链分量;φf为永磁体磁链;ωe为电角速度。
电磁转矩表达式:
Te=1.5piqφf
(2)
式中:Te为电磁转矩;p为电机极对数。
电机机械运动表达式:

(3)
式中:J为转动惯量;TL为负载转矩;ωm为机械角速度;ωe=pnωm。
2 改进趋近律设计
2.1 传统指数趋近律
指数趋近律这一概念最早由我国院士所提出,并亲自设计了指数趋近律表达式,具体如下:

(4)
式中:s为滑模面函数;ε、q为趋近系数,并且都是大于0的数;sign(s)为符号函数。
算法第一项-εsign(s)是等速项,第二项-qs是指数项。当运动点离滑模面s较远时(趋近运动),等速项与指数项共同作用,指数项起主要作用;当运动点在滑模面s附近时(滑模运动),等速项起作用,指数项逐渐为0。其中q越大,到达滑模面所用时间越短,ε越小,到达滑模面时的速度越小。合理平衡两者的数值关系,才能达到加快系统响应速度、减小超调和抖振的效果。
2.2 改进趋近律
趋近律的设计原则:
(1) 运动点在滑模面较远处时,趋近速度要大,加快响应速度,缩短趋近时间。
(2) 运动点在滑模面附近处时,趋近速度要尽量小,以免产生较大的超调。
以趋近律设计原则出发,进行趋近律改进的深入研究,改进后的趋近律表达式如下:

(5)
式中:ε>0,q>0,a>0,b>0。
函数f(s)的作用是加快系统响应速度,缩短系统趋于稳定过程,系统状态变量绝对值的幂次项抑制抖振幅度,减小误差。当运动点在无限远处时,|s|趋近于无穷,则f(s)趋近于无穷,趋近速度大;当运动点在滑模面附近处时,|s|接近于0,此时f(s)≈a/(1+a),小于1,趋近速度较小。与传统指数趋近律相比,改进后的趋近律在控制趋近速度方面效果较好,超调得到抑制,抖振幅度被削弱,自适应调整能力更为出色。
为了进一步对曲线进行优化,对符号函数采取平滑处理化,让仿真曲线更加平滑顺畅,平滑处理后的符号函数表达式如下:
(6)
式中:σ是一个数值较小的正常数,σ>0取0.01。
2.3 新趋近律性能分析
选用以下系统对趋近律进行性能分析,验证改进趋近律的优越性:

(7)
滑模面函数设为s=Cx,对其求导可得:

(8)
将式(4)、式(5)、式(7)、式(8)进行公式变换,则系统的控制输出u表达式如下:
u=(CB)-1(-CAx+slaw)
(9)

对传统指数趋近律以及改进趋近律控制器进行Simulink建模仿真,而后进行各参数的调试工作(参数自整定方法和频域分析法),最终选取各参数值为,改进趋近律参数a=15,b=15,两种趋近律共同参数q=10、ε=5。
两种趋近律控制性能效果对比如图1所示。

图1 两种趋近律性能对比
从图1对比可知,在系统响应速度、趋于稳定时间、抖振幅度等方面,改进后的趋近律控制效果比传统指数趋近律更好。
3 滑模速度控制器设计
3.1 控制器设计
在id=0、Ld=Lq=Ls的条件下,对PMSM调速系统进行状态变量的定义:
(10)
式中:ωref为给定转速;ωm为电机实际转速;Ls为定子电感。
由式(1)~式(3)可得:

(11)
将式(11)代入式(10),则:
(12)


(13)
定义滑模面函数s:
s=cx1+x2
(14)
式中:c为待定系数;x1为转速误差;x2为位转速误差的微分。
对滑模面函数s进行微分:

(15)
对式(5)、式(15)进行公式变换,则控制输出u为

(16)
q轴参考电流为

(17)
由于式(17)带有积分项,既削弱了抖振,也降低了稳态误差,系统动态品质得到提升。
3.2 稳定性分析
由李雅普诺夫(Lyapunov)函数:
(18)
可知,对其微分,并代入趋近律,可得:

(19)

4 仿真分析
图2为PMSM控制系统的调速框图,是一个由电流环、转速环构成的双闭环控制系统,其中电流环采用最原始的PI控制方法进行控制,而转速环则运用由改进的趋近律所构成的滑模速度控制器进行控制。随后搭建PMSM调速系统的Simulink仿真模型,并与PI控制器、基于传统指数趋近律的控制器进行仿真效果的对比。

图2 PMSM调速系统框图
电机参数如表1所示。

表1 电机参数表
控制算法参数设置:PI控制电流环Kp=45,Ki=220,转速环Kp=0.06,Ki=3;传统指数趋近律、改进趋近律参数c=200,q=100,ε=280,a=12,b=10。
从图3仿真效果可以得知,在转速方面,系统刚起动时,PI控制器产生的超调最大,稳定下来所用时间也最长;传统指数趋近律控制器超调较小,稳定所用时间较短;改进后的趋近律控制器无超调,并且达到稳定状态所用时间最少。在0.2 s突加负载后,改进趋近律超调最小,传统指数趋近律次之,PI控制表现最差,超调最大,如表2所示。
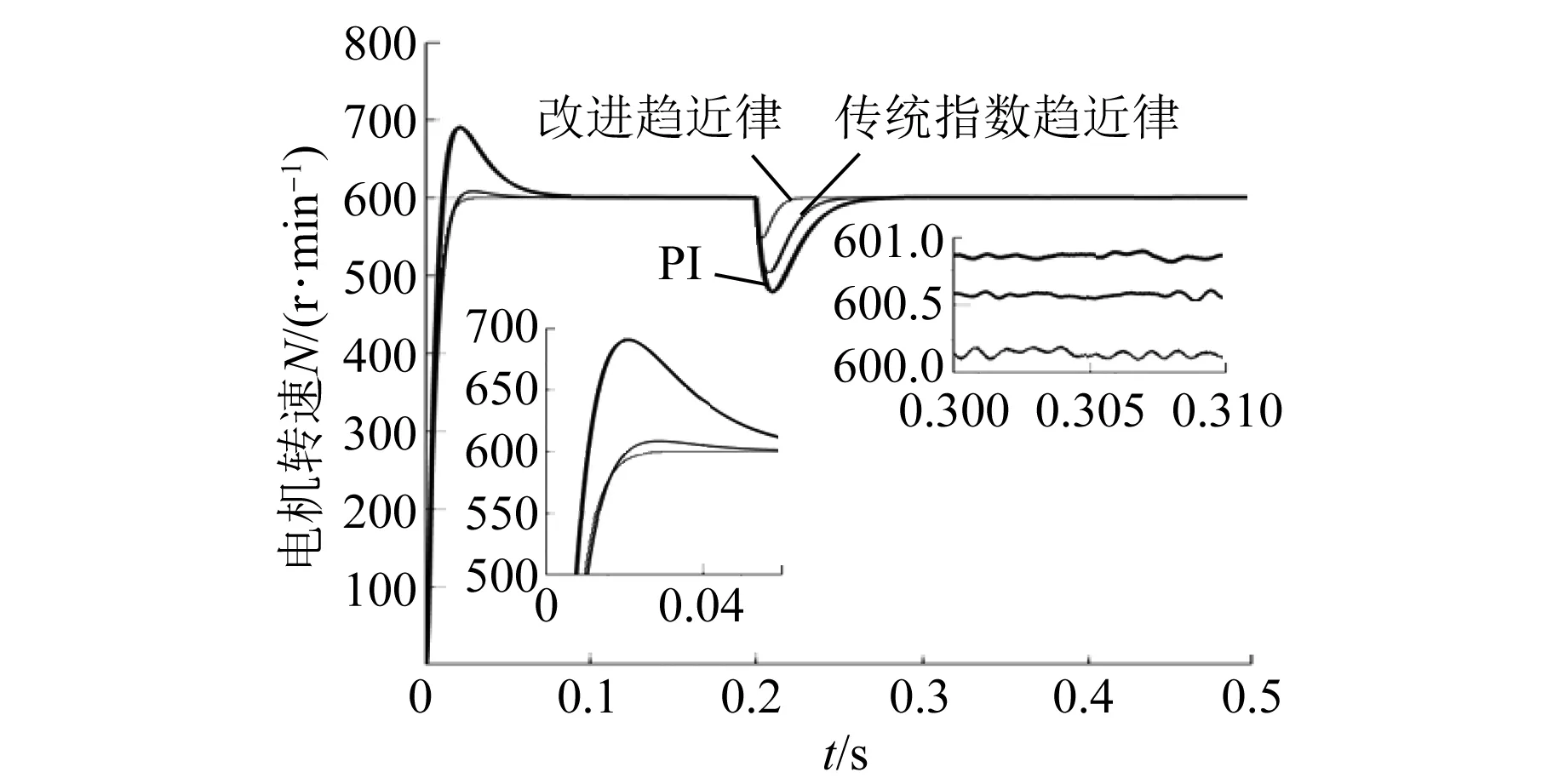
图3 电机转速变化曲线

表2 转速响应性能对比
为使视图清晰,图4和图5只显示系统起步响应阶段与跳变阶段。图4、图5中,在电磁转矩方面,控制系统刚起步阶段时,改进趋近律和传统指数趋近律控制器接近无超调,但PI控制器产生超调较大。在0.2 s突加负载阶段,改进趋近律响应速度最快,并且稳定下来耗费时间最少;传统指数趋近律响应速度次之,稳定耗费时间次之;PI控制响应速度最慢,稳定耗费时间最多。详细数据对比如表3所示。

图4 电磁转矩变化曲线

图5 电磁转矩局部放大曲线图
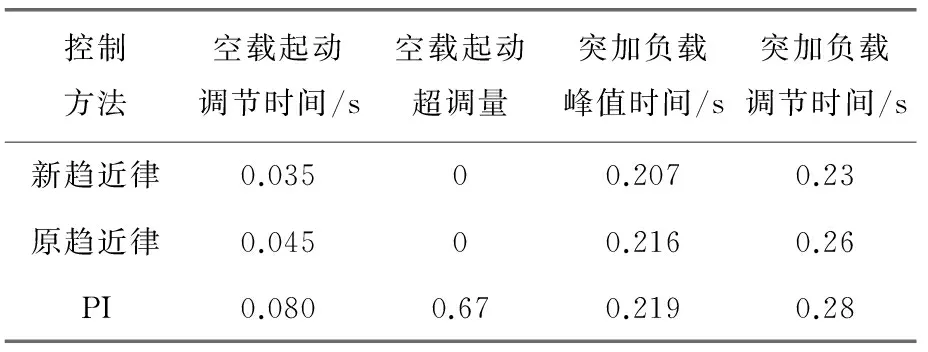
表3 电磁转矩响应性能对比
从以下图6~图8可知,在第一次三相电流趋于稳定阶段中,PI控制响应速度最慢,电流趋于0幅度变化最小,并且趋于稳定过程最长,电流容易紊乱;传统指数趋近律与改进趋近律响应速度、电流变化幅度差不多,均较快,电流曲线也比较平稳,趋于稳定过程较短。在系统0.2 s突加负载后三相电流第二次趋于稳定过程中,PI控制不能够及时到达特定转矩,稳定过程中电流变化幅度较大,约2 A,不够稳定,在0.26 s处稳定下来;传统指数趋近律稳定时电流幅度变化较大,约3 A,不够稳定,在0.25 s处稳定下来;改进趋近律稳定时电流幅度变化较小,约0.1 A,稳定性较好,在0.23 s处稳定下来。

图6 PI控制三相电流变化曲线
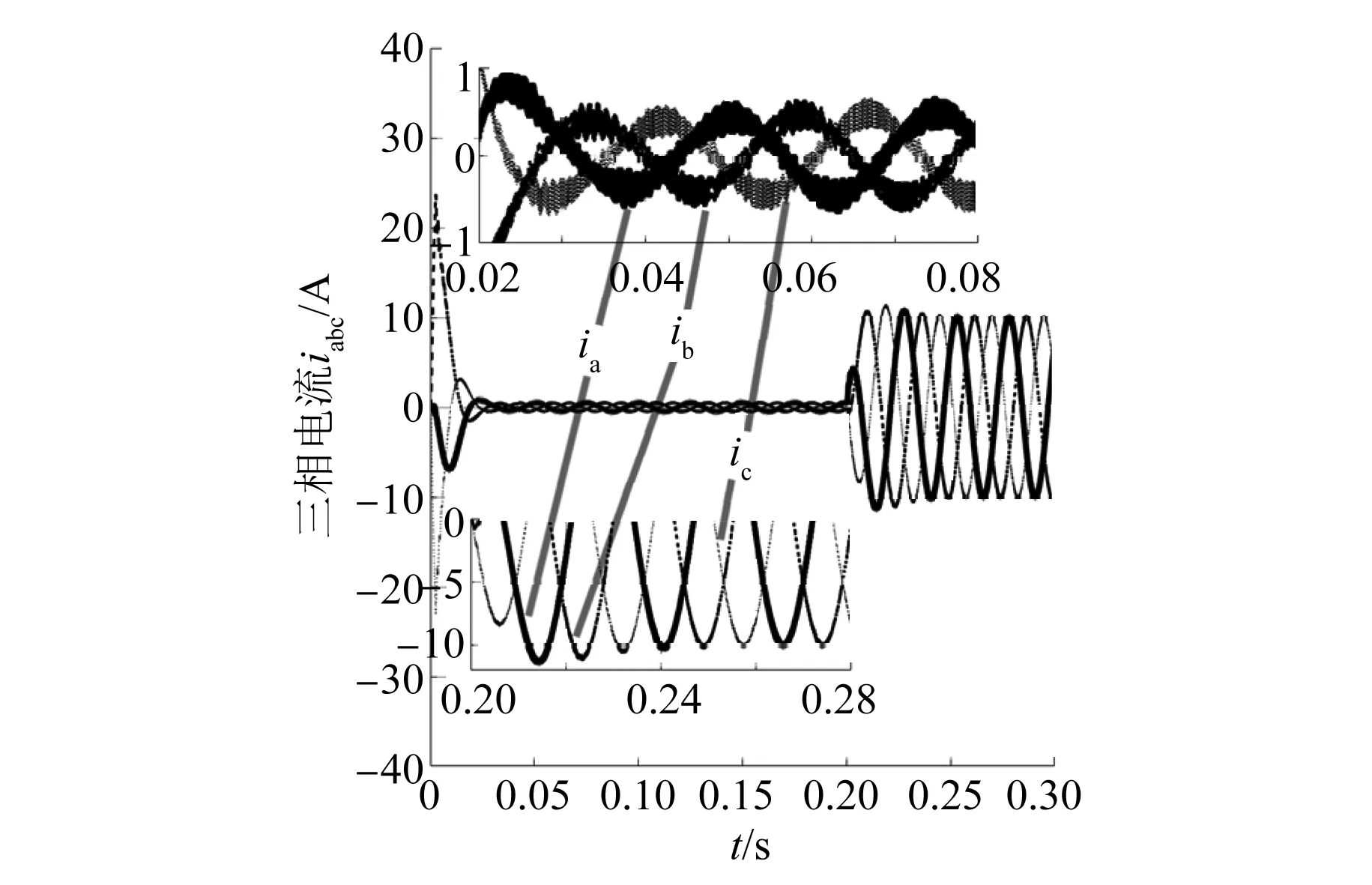
图7 传统指数趋近律三相电流变化曲线
图8 改进趋近律三相电流变化曲线
从以上仿真效果以及说明解释可知,改进趋近律控制器不论是在响应速度快慢、超调大小方面,还是抖振幅度大小、稳定过程所用时间长短方面,其展现出来的效果均比传统指数趋近律控制器和PI控制器要好,系统动态品质全方面地得到提升。
5 结 语
本文在传统指数趋近律的基础上,针对性地对其不足之处(超调大、抖振幅度大等)进行分析以及解决,具体为在等速项中引入以滑模面s为变量的函数,并将符号函数进行平滑处理。而后构建相关的滑模速度控制器,搭建PMSM调速系统的Simulink仿真模型,并且与传统指数趋近律控制器和PI控制器进行仿真效果对比。结果表明,改进后的趋近律控制器在系统响应速度、抑制超调和抖振等方面控制效果均比之前的方法要更为精进,进一步改善了系统动态品质。由此可见,该方法是完全有效的,并且改善效果显著。美中不足的是,超调和抖振并没有达到完全消除的效果,因此需要再进一步的深入研究。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
科技创新与应用(2019年17期)2019-06-09
中国惯性技术学报(2019年6期)2019-03-04
电机与控制学报(2018年9期)2018-05-14
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
