
基于RFID回波信号强度和KNN分类的生产现场网格化定位
2022-08-31 03:47王泽宇王美清
制造业自动化 2022年7期
王泽宇,王美清
(北京航空航天大学 机械工程及自动化学院 北京 100191)
0 引言
无线射频识别技术(RFID)提供一种非接触式的双向通讯,具有快速精确、可靠耐用、成本低廉的特点。无源式RFID应用广泛,如公交卡、员工卡等均采用了RFID技术,这类RFID电子标签价格低廉方便使用,但是识别范围比较小。有源式RFID识别范围广,在高速公路收费、港口货物管理中有广泛应用。RFID定位技术作为一种可以在室内部署的技术,也得到了广泛研究。然而,RFID定位技术有着定位精度低、信号易遮挡、易受干扰等问题。
随着大数据、物联网等技术的应用,车间内部生产流程越来越数字化、规范化。为了提高工厂内整体的智能程度,室内定位也随之应用起来:对工人的定位可以帮助管理人员优化作业计划、提高管理效率;对于托盘、AGV小车等运输物料设备的定位,可以随时监测车间内的物流状态,提高生产计划的执行效率。一般而言,对室内定位的研究往往着眼于坐标式的定位,比如,密西根大学的LANDMARC[1]是一个比较知名的研究成果,其原理是在空间中设定参考基站,通过对回波信号强度指示(Received Signal Strength Indication,RSSI)加权平均计算标签位置。Hightower等人设计的SpotON定位系统[2]是一种基于信号强度的三点式定位系统,他们设计并实现了这一系统的电路。
上述坐标式定位的粒度远远超过了车间内定位的需求,并且,为了提高定位的精度,研究者往往采取增加测点密度、提高信号基站功率、限定某一些场景模式和干扰源的方法[3],或者使用SVM(Support Vector Machine)[4]、卡尔曼滤波[5]、粒子群优化[6]等方法。而这些对车间内区域式的定位而言是没有必要的:车间内的定位需求一般是基于区域的,其粒度更粗一些,但需要提高定位的准确率、能抵抗车间内复杂环境的干扰、使用尽可能少的基站以便减少布线难度。这种定位更着重于判断被识别者到达了哪一个工位区域,而不是实时的坐标点。
在室内定位的研究中,K-最临近(KNN,K-Nearest Neighbor)法是最常见的一类计算方法。为了提升KNN的精度,研究者从模糊聚类[7]、几何聚类[8]、SVM[9]等方面入手。使用WKNN的方法通常关注定权的方式,如高斯函数法[10]。使用KNN对经典LANDMARC方法[11]做提升的思路也是研究的热点。
本文对基于RFID的生产现场区域定位技术展开研究,采用一种基于RFID信号强度分类的网格化定位方法来改善定位准确率,将受干扰的RFID信号强度作为一种特征,用于位置分类。根据生产现场布局,以工位为基础将车间网格化。采用KNN和W-KNN的方法分析和建立信号强度与现场区域的对应关系,解决遮挡和干扰情况下的定位准确问题;并通过仿真验证了所提方法的有效性。
1 常用RFID定位技术及问题分析
RFID技术早已深入到工业生产和日常生活中,它本身具有多种物理特性,可以用于实现定位。常见的利用信号时空几何信息进行定位的方法有:临近探测法、到达时间定位法(TOA)、到达时间差定位法(TDOA)和到达角度定位法(AOA)。
临近探测法是最常见的RFID定位方法,部署简单,通过识别一定范围内的信号,判断RFID标签是否在识别区域附近。该方法识别精度低,通常用于RFID标签的存在性识别,往往难以给出较为准确的结果。
到达时间定位法,即TOA(Time Of Arrival),是利用计算信号到达识别设备的时间定位。将时间长度乘上光速转化为空间距离,结合三个或以上的识别基站,就可以实现坐标解算。这种定位方法对时间识别有比较高的要求,需要在短距离内实现很好的时间精度,识别设备和RFID标签之间需要精确地同步时钟,而RFID通信速率低,实现精确地时间同步较为困难。
到达时间差定位法,即TDOA(Time Difference Of Arrival),原理与TOA类似,不过计算的是信号到达识别基站之间时间的差值,使用双曲线测距来计算坐标。这种方法在一定程度上能提高定位精度,不过依然存在时间测量难度大的问题。
到达角度定位法,即AOA(Angel Of Arrival),需要标签和识别设备具有方向性的天线,可以识别出信号到达的角度,结合多个识别基站实现定位。这种方法对设备的要求比较高,并且容易受空间中干扰的影响,很容易因多径效应产生较大误差。
上述的几种方法测量精度往往都难以保证,且容易受到干扰和多径效应的影响。因此,逐渐发展出基于回波信号强度的定位方法(Received Signal Strength Indication,RSSI)。在理想环境中,信号在传播中的损耗与距离相关,通常使用对数路劲损耗模型来描述如式(1)所示:

Pl表示经距离d后衰减的信号强度,P0表示距离为d0处的信号强度,n是路劲损耗系数,η是遮蔽因子。
事实上,由于空间中存在着各种干扰和多径效应,仅靠信号衰减模型来计算坐标通常也会得到不够理想的结果。但是,信号强度的测量比较方便,且其本身携带有环境因素影响下的信息,结合机器学习或神经网络的方法,可以使用回波信号强度实现比较精准的定位。
2 基于工位和物流需求实现车间网格化
车间分块是面向实际加工生产需要的,对于传统的RFID定位而言,不管使用何种方法,都是计算出一个标签的实时坐标。然而在车间物料运输过程中,这种粒度的定位往往没有必要。管理者关心物料何时从哪一个工位发出,何时到达目标工位,这种定位是与加工流程和物流需求相关联的,因此,以工位为基础的粒度划分更为实用合理。
下图给出了一个车间工位的划分简图。图中的各色线条代表了车间中的各类遮挡(木板、砖墙、玻璃、金属等)。图中标注了车间布置的6个高功率RFID基站,图中的6个虚线框围成的区域代表需要识别的6个工位。可以看出,车间网格化的目的是面向工位布局和物流需求的,将车间内物料的识别转化为工位的分类,从而实现智能化管理。在网格的划分上,可以不对全车间做完全覆盖。网格和网格之间留有空隙,这样可以提高识别精度,减小误识别率。网格的选取,需要在方便运输的基础上,选择信号好、网格和网格之间间距尽可能大的地方。

图1 车间内布局与干扰
信号接收器的布局需要综合考虑网格划分和实际车间情况。接收器应均匀地分布在车间各网格之间,每一个网格都应至少有一个接收器可以无遮挡覆盖。对于遮挡多、信号差的地方,可以采取多个多角度接收器的环绕布局。在网格间距比较接近的地方,需要布置多个有区分效果的接收器。本论文中,将被遮挡、被干扰的信号强度作为分类的依据,因此如果对某个网格而言,某接收器是被遮挡的,那么只要遮挡是比较充分均匀的,就不会对结果有很大影响。如果网格内的信号强度是不均匀的,应当调整网格和接收器布局,或在网格内多次均匀地做大量实验。
在车间环境比较好的情况下,也可以增加网格数量、减小网格面积。这样可以提高RFID标签的识别精度。位置精度要求高的场合可以采取这种方法。
3 基于KNN和W-KNN的网格化区域分类方法
在网格化的基础上,RFID标签定位不再是一个计算坐标的回归问题,而是一个区域的分类归属问题。在当前问题中,K-最临近(KNN,K-Nearest Neighbor)是一种常用且有效的方法。
KNN是一种简单、基础但有效的人工智能算法,最早由Cover和Hart在1960s提出[12]。KNN的思路是,比较测试数据与训练样本的距离,选择最接近的K个样本,用于估计样本的实际位置。W-KNN(Weight-KNN)是一种使用加权方法对KNN的优化,以便提高KNN的精度。这样,KNN和W-KNN就成为一种计算坐标的回归方法。本文基于KNN和W-KNN,提出一种面向网格化区域的分类方法。
假设区域内布置了n个基站,一共有m个区域。在每个区域内均匀地做多次实验,可以得到这些实验RSSI数据的平均值和方差为:


θij表示第i个区域中第j个基站的平均RSSI,表示第i个区域中第j个基站的RSSI方差。
和传统方法类似,将RSSI矩阵记为行向量的形式H为:


选择d最小的区域作为分类器判别的区域。
实际上,更常见的KNN方法中,不需要计算一个区域内的平均RSSI,而是把所有的样本测点都和实验数据比较距离,选择前K个测点,计算这K个点分别属于那些区域,选择点数最多的区域作为分类的结果。但是,这种方法计算量非常庞大,且并不能保证可以克服未知干扰的影响。
为了克服干扰的影响,同时减少计算量,结合方差使用W-KNN方法做分类。由于方差体现了一个基站在一个区域中RSSI的变化程度,因此方差较小的数据权重更大。
使用W-KNN方法时,实验数据和第p个区域的加权欧式距离为:

wi表示权重,这也就是W-KNN中加权的含义。如果wi以某种特殊的形式确定,算法就是W-KNN算法。wi给定的方式有很多,一般来说,d小的样本对应的wi比较大;有的文献中考虑了样本的方差属性,在一个样本点上做多次重复实验,取实验的平均值为训练集,而实验的方差作为权重取值的依据,方差越小的点应获得更多的权重。
本文给定的权重是方差的调和平均数。为了防止算式中由于方差太小以至于算出特别大的数,分母中通常加一个常数,这里取1。
用这种方法计算得到的p充分考虑了区域中不同点的特点,因而有更好的效果。
4 仿真与分析
在仿真中,我们使用仿真软件,模拟了工厂中在干扰影响下的信号强度。每个区域中均匀地选择10个点采集RSSI数据。图2给出了空间中信号分布仿真的结果。RSSI数据的单位是dB,该值最大为0,最小为-100,数据为-100时表示信号极其微弱可以忽略,或者完全搜索不到信号。计算每个区域中RSSI数据的平均值和方差,结果如表1所示。
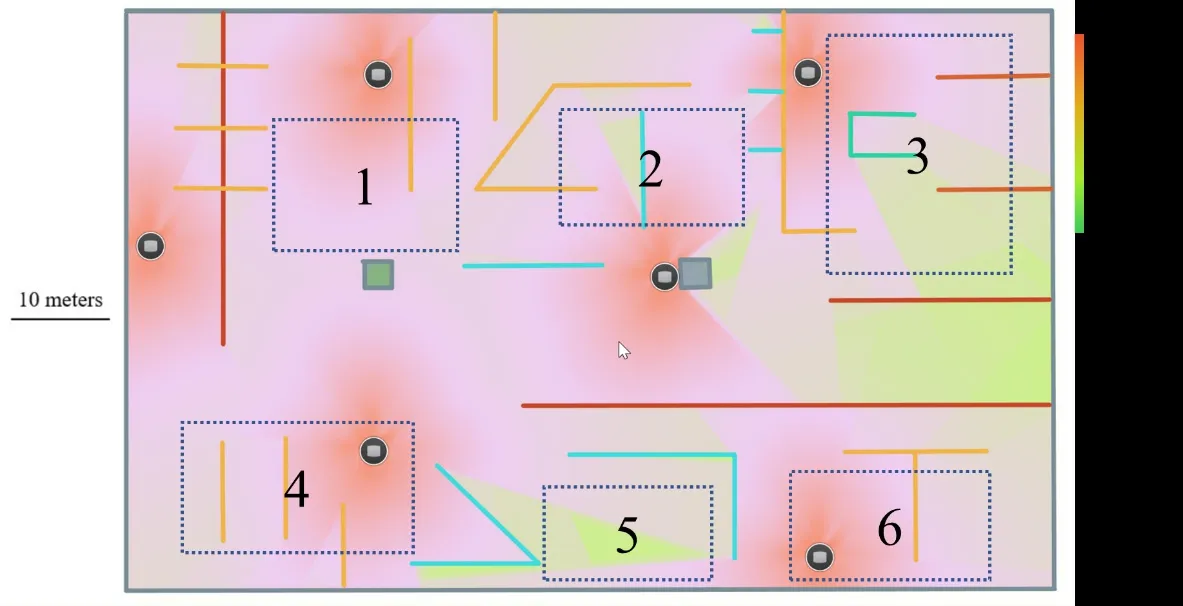
图2 车间内信号分布仿真

表1 各网格信号的均值和方差
在每个区域中随机选择10个测点,使用KNN方法和WKNN方法测试识别的结果,结果如表2所示。

表2 KNN和WKNN判断的正确率
可以看出,整体上使用WKNN的方法比使用KNN的方法识别正确率有提升,尤其是区域5提升明显,但是区域2的正确率依然偏低。这和数据的特点有关。由于WKNN考虑了RSSI的方差,因此在信号不好的地方,方差一定程度上可以体现信号的稳定性。区域5的信号整体上不好,但是基站3在区域5内的方差比较低,说明变化比较小。更有代表性,使用WKNN方法时会获得比较明显的识别率提升;区域2中各基站的信号强度都偏低,且方差也比较大,说明区域内信号不佳且变化大,即使使用WKNN方法也难以实现明显的精度提升。以上分析说明,算法识别的精度与基站的布置有关。KNN方法和WKNN方法可以一定程度上适应复杂环境下区域识别的要求,但是需要区域内有至少一个代表性比较强的基站信号特征,这种代表性可以用方差来衡量:这个区域内RSSI方差越小的基站,越能代表这个区域的特征。因此,在基站布局上应合理考虑识别区域需求和基站位置,从而使识别正确率更高。
5 结语
本文提出了一种基于RFID回波信号强度和KNN、WKNN的生产现场网格化定位方法,通过结合生产现场实际情况和物流需求,在车间内设定若干个识别网格。为了充分覆盖网格中的所有位置,需要在网格内均匀地采集多个测点,使用KNN和WKNN方法来获得信号强度的特征数据。在仿真中,我们比较了KNN和WKNN方法的效果,使用WKNN在一些情况下可以显著提升识别精度,但是对于区域内信号特征代表性不强的网格依然不能做到较好的识别,因此网格的选取和基站的布置对于识别的结果也是有影响的,这对于相关研究具有借鉴意义。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
科学(2020年3期)2020-11-26
时代人物(2020年2期)2020-06-19
初中生世界·九年级(2017年10期)2017-11-08
中国信息化周报(2016年45期)2016-12-27
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
中国市场(2016年12期)2016-05-17
