
基于人机耦合的下肢外骨骼机器人动力学仿真与样机试验
2022-08-31 03:46刘建辉骆祎岚白云峰朱世根
制造业自动化 2022年7期
刘建辉,骆祎岚,白云峰,丁 浩,朱世根
(东华大学 机械工程学院,上海 201620)
0 引言
下肢外骨骼助力机器人作为一种可穿戴性动力装置,结合了人体的智慧与机器的“体力”[1],外骨骼机器人在军事、医疗等领域发挥着非常重要的作用,能够提高人体肌能完成各类极限活动到辅助恢复运动能力[2,3],有着广泛应用前景。
外骨骼助力机器人的研究始于20世纪60年代[4],主要集中在美国以及日本,如美国加州伯克利研制的下肢外骨骼机器人“BLEEX”、洛克希德·马丁公司研制的“HULC”,日本筑波大学研制的“HAL”外骨骼机器人[5~7]。国内对于下肢康复外骨骼研究起步较晚,但也取得了一定的成果,如中科院研发的康复下肢外骨骼机器人[8],电子科技大学研发的下肢助力外骨骼等[9],此外,哈尔滨工业大学、浙江大学等高校也在外骨骼领域开展了许多研究[10]。近年来,我国经济发展迅速,也伴随着人口老龄化日趋严重的问题,给社会带来了严重的负担[11],目前国内康复类外骨骼机器人结构复杂且价格昂贵。
由于国内下肢外骨骼人机耦合方面的研究并非十分常见,本文针对下肢残障人群设计了一款结构简单,舒适度高的康复型下肢外骨骼机器人,通过理论与实验结合的方式研究人机耦合过程中动态受力情况和外骨骼自身结构特性来提高康复训练的效果。
1 下肢外骨骼结构设计
外骨骼的设计需要根据人体行走方式以及人体骨骼的构型进行设计,需要满足不同身高的人群要求且不能影响人正常运动。因此,外骨骼设计的可扩展性以及舒适性至关重要。
1.1 整体结构设计
所设计外骨骼机器人一共由10个自由度,每条腿5个自由度,髋关节2个自由度、膝关节1个自由度、踝关节2个自由度,外骨骼机器人的整体结构图如图1所示。

图1 下肢外骨骼结构示意
该下肢外骨骼机器人由动力源、背板架、腰部伸缩装置、大腿伸缩装置、小腿伸缩装置、髋关节、膝关节、踝关节以及大小腿连杆以及各关节驱动装置组成。背夹板所带的动力源为整个系统提供动力来源,各关节电机为各个关节提供驱动力,大腿小腿伸缩装置保证不同身高的人体都能穿戴。
1.2 各关节结构设计
1.2.1 髋关节结构设计
髋关节结构类似球关节,对于人体平稳运动的实现至关重要,在保证髋关节功能的前提下可以简化为屈-伸、外展-内收两个方向上的运动。其中屈-伸在行走运动中起主要作用,因此设计一个主动驱动关节来实现下肢外骨骼的屈-伸运动。
关节动力装置由电机与谐波减速器构成,并通过机械限位装置限制电机的转动角度以保护穿戴者的髋关节。摆动转向机构实现外展-内收运动。外展-内收主要起辅助作用,因此不添加主动驱动,设计髋关节详细结构如图2所示。

图2 髋关节结构示意
1.2.2 膝关节结构设计
膝关节简化后可以看做一个单轴关节,形状类似于机械上的转动副,其结构如图3所示。下肢外骨骼机器人膝关节主要运动为屈-伸运动,内旋-外旋动作比较微小,可以忽略不记,因此使用主动电机驱动与旋转运动副来实现膝关节的屈-伸运动。机械限位装置与髋关节相似,通过限制膝关节转动范围,对穿戴者起保护作用。

图3 膝关节结构示意
1.2.3 踝关节结构设计
踝关节功能结构同髋关节相似,也为球关节,由于踝关节内旋-外旋动作运动范围微小,故只设置2个自由度,且均为被动自由度,结构如图4所示。步行过程中,主要由屈伸转向机构实现跖屈-背屈运动,内外翻转机构通过踝关节连接件实现内翻-外翻运动,踝关节连接件在实现内外翻转运动时需承受较大冲击力,因此在设计中,对连接件完成加厚处理。
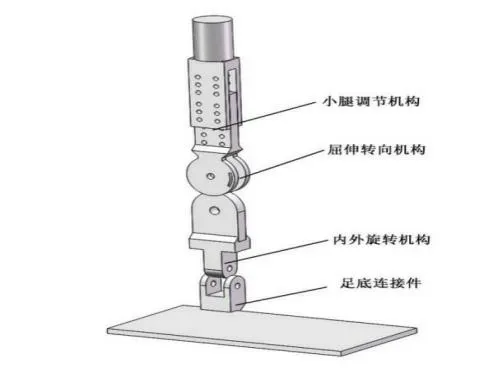
图4 踝关节结构示意
1.2.4 人-外骨骼固定机构设计
为了保证穿戴者的舒适性,设计一款新型可调节锁扣绑带结构,如图5所示。绑带通过固定装置与腿部连杆相连接,确保工作时不产生滑移与偏转。因不同人群腿围不同,在绑带中心处设计了一种伸缩调节锁扣以满足不同穿戴者需要。由于人体在行走时腿部肌肉会产生一定张力,本设计对绑带内侧设计多层波纹形状的柔性防滑涂层,保护运动过程中各关节不因大剧烈动作而受损伤。
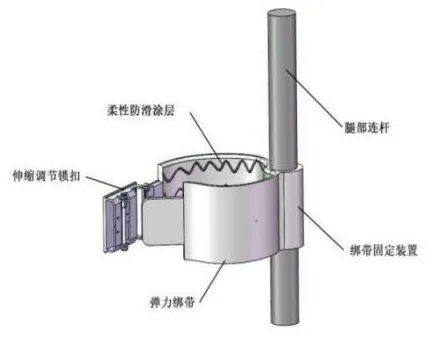
图5 绑带结构示意
2 外骨骼机器人动力学仿真
2.1 仿真模型的建立
首先利用SolidWorks软件建立了三维模型,并同时构建人体模型,将人与外骨骼模型装配好导入ADAMS中,完成人机模型虚拟样机的建立。
在ADAMS软件中对导入的虚拟样机的每个零件按照外骨骼实际设计材料的属性进行编辑定义,并设置重力的方向,基本设置完成后,下肢外骨骼的人机耦合虚拟样机模型如图6所示。
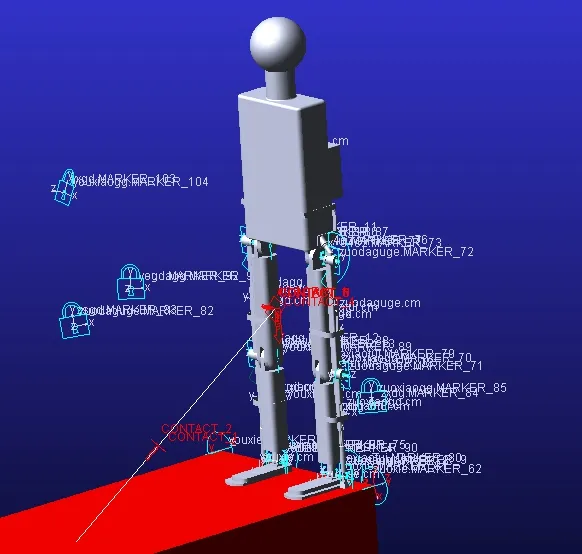
图6 外骨骼机器人ADAMS模型
2.2 仿真条件与约束的设置
由于本文中的虚拟样机采用外骨骼带动人的运动方式,具体约束如表1所示,表1为单腿约束表,所以在人体上建立6个转动副,分别为左右大腿的髋关节、膝关节、踝关节各1个转动副,人体的脚与外骨骼足底板简化为固定副连接,外骨骼各个关节也分别建立1个转动副,外骨骼机器人一共6个转动副,人的大腿和外骨骼的大腿连接是通过绑带接触。整个工作过程是外骨骼动力源给各关节提供动力,各关节的转动同绑带带动人体肢体的运动。

表1 下肢外骨骼约束
完成仿真约束的设置接下来需要设置添加仿真驱动和参数,通过模拟外骨骼带动人的运动过程,为各关节驱动设置的参数如表2所示。

表2 各关节驱动函数
完成仿真约束与驱动参数的设置,开始仿真,通过ADAMS后处理模块可以得到外骨 各个关节的力矩以及人机接触力等。
2.3 仿真结果分析
2.3.1 各关节力矩分析
图7为下肢外骨骼右腿髋关节,膝关节,踝关节的关节力矩曲线,joint-6,joint-5,joint-11分别为髋关节,膝关节和踝关节的力矩曲线,髋关节的最大力矩为24N·m,膝关节的最大力矩为20N·m,踝关节最大力矩为4N·m,力矩在1秒处发生了较大的变化,是由于在仿真的时候Step函数会导致力矩发生较大的变化。在1s~2s处,该阶段为腿的摆动状态,该阶段内力矩变化平稳。
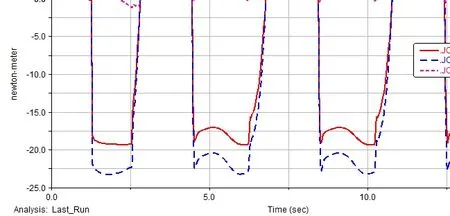
图7 关节力矩曲线
2.3.2 人-外骨骼协同性分析
人与外骨骼行走的步态图如图8所示,观察人与外骨骼的行走的步态图可以看出,外骨骼带动人行走的步态平稳,没有发生滑倒、偏移等现象。
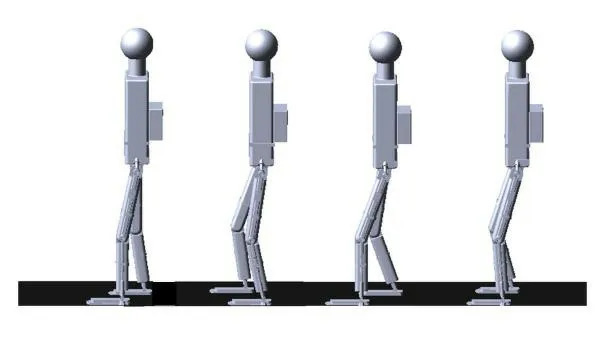
图8 人机模型样机联合行走图
为了进一步分析人机耦合过程中,人与外骨骼跟随性,通过仿真得到人随着外骨骼运动的大腿和小腿质心的变化曲线图,如图9所示。
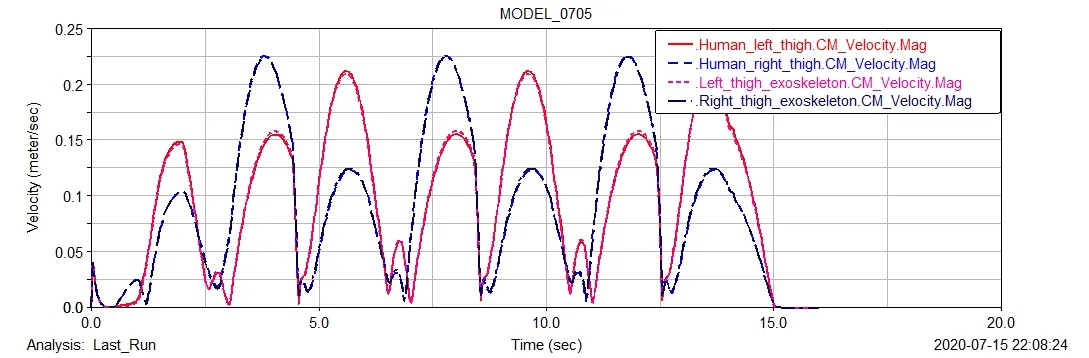
图9 人体和外骨骼左右大腿质心速度变化曲线
由图9可知,人和外骨骼左右大腿的质心曲线99%都是重合的,在质心达到单个步态的最高点时,即人体抬腿到最高处,此时有1%的偏差;同理图10中,小腿质心曲线与外骨骼质心曲线的重合度较大腿稍低一点。由此可知,人体与外骨骼人机协同性能非常好,能够保证外骨骼与人体行走时各关节的同步性。
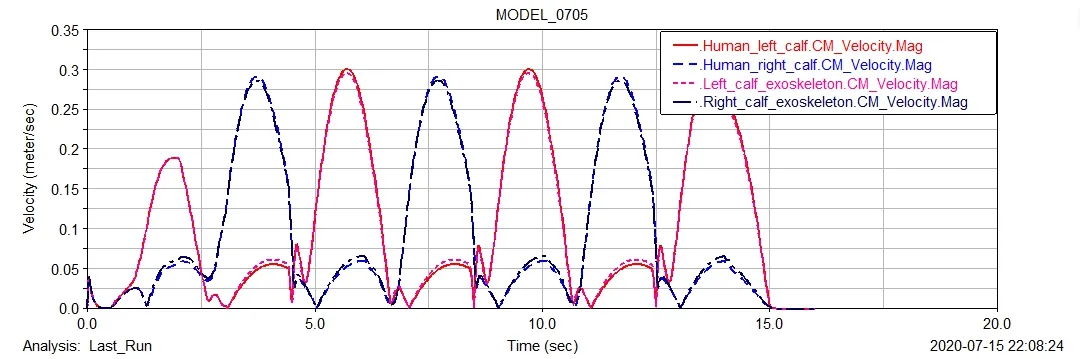
图10 人体和外骨骼左右小腿质心速度变化曲线
2.3.3 人-外骨骼的接触力分析
外骨骼与人的接触力影响着人行走时的舒适度以及人运动的稳定性,大腿与绑带接触力和小腿绑带接触力如图11所示。

图11 大腿绑带接触力
图11为大腿绑带接触力与小腿绑带接触力,由图contact_5和contact_6分别表示的大腿与小腿与绑带接触力可知,大腿绑带接触力大小范围为0N~3.8N,小腿绑带接触力大小范围为0N~0.7N,驱动大腿所需要的力比小腿要大4~5倍,符合正常人体运动情况,在图中3s左右处,接触力达到最大值,此处为大腿处到达最高点,在此处,出现了力矩轻微的波动,是由于在行走过程中,此时绑带与人体有一定的滑移,属于正常现象,整个行走过程中,力矩没有出现突变,表明外骨骼带动人的过程安全平稳。
图12为人在行走过程中的足底与足底板的接触力,该图很好的反应了人-外骨骼行走的步态,接触为0的地方表示,该脚处于摆动相的位置,为最大值表示为支撑相,左右腿支撑相和摆动相占比为1:1,且整个运动过程中,力矩变化规律,说明人体行走的速度较为均衡,且稳定。
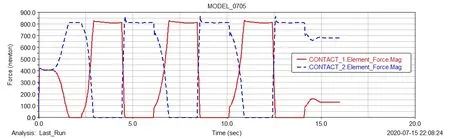
图12 足底接触力
通过以上动力学仿真分析,可以得出该下肢外骨骼机器人整体结构设计合理,能够满足基本的康复训练要求,但是仍然存在以下缺陷:外骨骼的结构与人体的模型全为刚性结构,在正常情况下人体有着弹性和缓冲性,后续可以进一步对人体进行柔性化处理。
3 下肢外骨骼样机试验
3.1 试验目的与方法
为了研究下肢外骨骼机器人人机耦合的特性,研制了下肢外骨骼机器人物理样机,进行了人-外骨骼平地行走试验分析,图13为人-外骨骼试验模型。

图13 人-外骨骼试验模型
根据仿真规划的步态进行人-外骨骼的平地行走试验,试验过程中行走姿态图如下图14所示,在试验过程中,通过MPU6050姿态传感器与力传感器采集人-外骨骼膝关节的角度变化曲线图,以及人-外骨骼大腿接触力曲线变化图。

图14 人-外骨骼平地行走姿态图
3.2 试验结果及分析
1)人-外骨骼行走过程中关节角速度分析
图15为人-外骨骼平地行走试验中人体与外骨骼的膝关节角度变化曲线图,图中灰色和红色曲线分别表示人体和外骨骼膝关节变化曲线。

图15 外骨骼与人体膝关节角度对比
从该曲线可知,人的膝关节运动较外骨骼相对滞后,这是由于外骨骼在带动人运动的过程中,存在有一定的响应时间;在整个运动过程中,人体和外骨骼关节曲线光滑,证明人-外骨骼的协同运动稳定性能较好,人与外骨骼的运动能保持95%的同步性。
2)人-外骨骼大腿接触力分析
图16为试验过程中右肢大腿与外骨骼接触力曲线图。

图16 右肢大腿与外骨骼接触力曲线
图16曲线为试验过程接触力曲线图,人体与外骨骼最大接触力为5N,接触力在右肢抬到最高点或者与大地接触的时候,力的一阶导数稍大,这是由于在人腿在抬到最高点时候,或者接触大地时候,大地和外骨骼施加了反向力,在单个运动周期内,人与外骨骼的接触力无较大的冲击,表明整个运动过程中,人运动的舒适性较高。
对比图中试验与仿真的数据,试验结果与仿真结果存在一定的偏差,其中的偏差主要原因可能由于物理样机加工与装配的精度与试验测量的精度导致的。
4 结语
本文设计了一款10自由度下肢外骨骼机器人,采用ADAMS仿真软件完成了人-外骨骼行走的动力学仿真分析,并对所设计的外骨骼机器人进行了样机的试验,得到以下结论:
1)该下肢外骨骼机器人结构方案可行,人-外骨骼运动合理。
2)通过ADAMS仿真分析和样机试验,观察人-外骨骼在进行协同运动时步态和试验曲线结果,表明人-外骨骼能够稳定的协同运动性,且人-外骨骼运动过程中舒适性较高,若控制物理样机的加工精度,该人-外骨骼模型具有更高的人机跟随性。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
小哥白尼(野生动物)(2021年12期)2021-03-29
中国临床医学影像杂志(2019年6期)2019-08-27
轻兵器(2019年5期)2019-06-21
青岛画报(2017年10期)2018-02-01
文学港(2017年11期)2017-12-06
大众健康(2016年3期)2016-05-31
小资CHIC!ELEGANCE(2015年10期)2015-09-10
红领巾·萌芽(2015年5期)2015-06-16
少年科学(2015年4期)2015-05-07
