基于改进电法装置和深度神经网络的填埋场渗滤液水位探测
2022-08-25 14:00:20夏广培能昌信侯晓姝刘景财姚光远
环境科学研究 2022年8期
夏广培,能昌信,,侯晓姝,刘景财,杨 枫,姚光远,徐 亚*
1. 山东工商学院信息与电子工程学院,山东 烟台 264005
2. 中国环境科学研究院固体废物污染控制技术研究所,环境基准与风险评估国家重点实验室,北京 100012
3. 生态环境部环境规划院,北京 100012
填埋场是固体废物的主要处置场所,也是土壤和地下水污染风险集中发生的场所. 近年来,固体废物填埋场的环境风险管控成为固体废物管理领域的焦点. 填埋场中的渗滤液水位过高不仅会加大渗滤液的渗漏风险,污染土壤和地层水,还会影响固废堆体的稳定性,极易造成堆体滑坡、坍塌等安全风险[1-3]. 近年来,我国固体废物填埋风险管控标准不断完善,2019年修订的《危险废物填埋污染控制标准》[4]明确了渗滤液水位不得高于30 cm.
渗滤液水位探测是渗滤液水位控制的前提,近年来引起诸多研究者的关注. 例如:张文杰等[5]通过钻孔布置渗压计测试不同深度的孔压,得到渗滤液水位分布;何海杰等[6]通过钻孔至预定深度,提取套筒渗滤液,获得多层覆盖层的填埋场渗滤液水位;除钻探方法外,基于渗滤液饱和区与非饱和区电阻率差异的电阻率法等无损探测方法也逐渐兴起[7]. 付士根等[8]使用Wenner装置对库底无防渗HDPE膜的非正规垃圾堆场进行探测,有效识别了渗滤液饱和水位.
然而,视电阻率与真实电阻率之间为非线性映射关系,传统电阻率法采用最小二乘法(LS)等线性反演算法反演真实电阻率时,容易陷入局部极小值,无法得到全局最优解[9];同时,由于现代工程填埋场库底常铺设HDPE膜,其高阻特性掩盖了渗滤液的低阻特性,使用基于LS算法的传统电阻率法难以精确识别渗滤液水位. 近年来,基于深度神经网络的非线性反演算法发展迅速,该算法基于数据集构建概率统计模型并运用模型对数据进行预测与分析,直接从数据中构造非线性数学模型从而映射输入和输出之间的非线性关系,已在生物医学、图像处理、自动驾驶和环境治理等领域取得了重大进展[10-14],相比传统LS算法其在电阻率反演上呈现出独特优势.
深度卷积神经网络(convolutional neural network,CNN)作为深度神经网络的一种,具有较深的网络层数和更强的参数处理能力[15],收敛速度和预测精度均优于BP神经网络[16]. U-Net将CNN网络中的低维和高维特征进行融合[17],并使用少量数据集进行训练和测试,为医学图像分割做出了很大贡献[18]. 耿艳磊等[19]在U-Net中引入半监督全卷积网络,实现了场景复杂的高分辨率遥感影像上的地物提取. Zeng等[20]将残差块、多尺度和通道注意力机制与U-Net相结合,提高了细胞检测、细胞分类和肿瘤分级的核分割精度.
为此,笔者引入U-Net进行填埋场渗滤液水位探测的电阻率反演;同时,针对传统电阻率法的采集装置仅包含一个垂直剖面的渗滤液信息,且深度越深其携带信息量越少的问题[21],提出了一种改进的采集装置−川字型装置,使得电流可以通过更多介质,采集数据携带了大量的渗滤液信息,有助于识别深层垃圾下方不同区域的渗滤液水位. 利用川字型装置采集的数据量大以及多层感知机(MLP)能够将不可定义的电势空间变换到低分辨率特征图像空间的特点[22],构建MLP和U-Net相结合的川字型反演深度神经网络(EConvNet-C)进行渗滤液水位探测. 首先基于川字型探测装置建立多渗滤液水位场景的COMSOL数值模型以构建探测数据集,用于EConvNet-C网络的学习训练,实现水位探测数据到真实电阻率的非线性映射;其次,为验证川字型装置及其非线性反演模型的准确性,将其与Wenner装置和二极装置及LS算法、EConvNet-T反演网络进行对比;最后,利用实际填埋场地的检测数据验证EConvNet-C算法的有效性,以期为后期开展评估和修复工作提供技术支持.
1 研究方法
1.1 基本流程和方法验证
与其他人工智能反演算法类似,EConvNet-C反演同样通过对样本进行学习,建立电势差分数据与真实电阻率之间的非线性关系,进而在实际探测时通过电势差分数据准确反演真实电阻率及其分布. 核心步骤包括两部分:一是具有代表性和高质量的样本数据的生成;二是对样本数据进行训练,使得网络输出和期望输出向量之间的均方误差达到目标要求. 首先,针对提出的川字型采集装置,采用COMSOL仿真软件,建立川字型探测模拟模型,模拟获得不同填埋场高度、不同渗滤液水位的电势采集数据;然后,根据川字型装置采集到的电势两两相减获得电势差分数据,使用EConvNet-C进行训练,建立电势差分数据与渗滤液水位的非线性网络关系模型. 另外,为验证EConvNet-C的准确性和精度,使用COMSOL模型得到的模拟测试集和江西省某危废填埋场实际数据进行对比. 填埋场渗滤水位探测流程与方法验证如图1所示.

图1 填埋场渗滤液水位探测流程与方法验证Fig.1 Landfill leachate level detection process and method validation
1.2 川字型装置和深度神经网络模型耦合
由于川字型装置观测数据与电阻率模型在空间上没有一一对应关系,针对这一问题,根据川字型装置观测数据量大的特点,构建MLP与深度神经网络U-Net相融合的深度神经网络反演模型(命名为EConvNet-C),以探测填埋场渗滤液水位.
1.2.1 川字型装置
1.2.1.1 川字型装置的流线分布
在填埋场四周和底部铺设HDPE膜,HDPE膜的电阻率为1017Ω∙m,其高阻特性使电流无法穿过,而是沿着HDPE膜表面流动. 传统电阻率装置(如Wenner装置、二极装置等)是在一条测线上进行电阻率测量,导致电流只能流过渗滤液区域的一个剖面,获得的数据仅携带少量的渗滤液信息. 川字型装置通过两条平行测线上的电极供电,使得大部分电流流过渗滤液区域(见图2),所获得的数据携带大量的渗滤液信息,提高了渗滤液水位的识别率和探测范围.
1.2.1.2 川字型采集方式
电极结构由128个电极组成,分别布设在3条平行测线上,在测线1中布置32个电极作为供电电极A,极距为2 m;在测线2中布置32个电极作为供电电极B,极距为2 m;在测线3中布置64个电极作为采集电极M,极距为1 m. 电极布设和采集过程如图2所示.
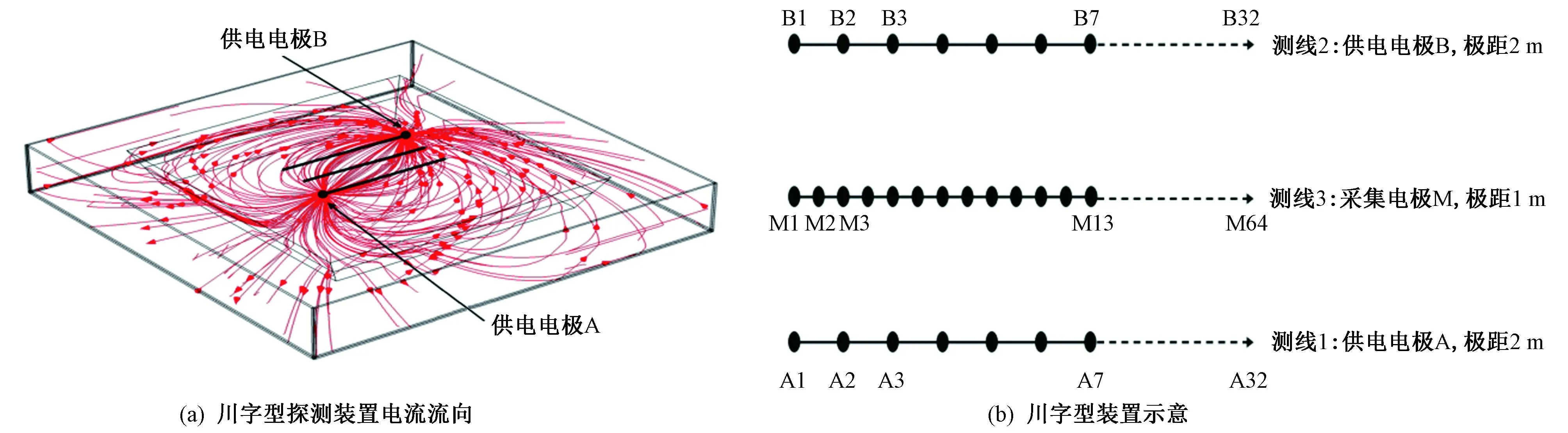
图2 川字型装置电流流向及排列方式Fig.2 The current flow direction and arrangement of ‘Chuan’ type device
每步电极转换都包含电势信息,共有32组,其电势采集步骤如下.
第1组:第1步,供电电极A1供正电,供电电极B2供负电,采集电极M依次采集;第2步,A1供正电,B3供负电,采集电极M依次采集;直至第31步,A1供正电,B32供负电,采集电极M依次采集.
逐步迭代循环至32组:第1步,A32供正电,B1供负电,采集电极M依次采集;第2步,A32供正电,B2供负电,采集电极M依次采集;直至第31步,A32供正电,B31供负电,采集电极M依次采集.
1.2.2 川字型装置的人工智能反演算法
1.2.2.1 基于仿真模型的样本数据生成
数据集的质量、数量和真实性决定了EConvNet-C模型的准确性和实用性,由于实际填埋场地中地电结构复杂,训练集数据难以从含有渗滤液的实际场地中获取. 采用仿真软件对实际场地进行模拟,通过改变模型参数获取训练集数据,Butler等[23]通过试验验证了仿真数据具有真实性和可靠性. 使用仿真模拟模型可以获得不同渗滤液位置和不同填埋物质的电势差
分数据,作为训练集数据和测试数据,为EConvNet-C模型学习提供数据基础.
代表性填埋场地构建:填埋场中渗滤液的积存可概化为2种情况:①正常情况下渗滤液积存于HDPE膜上,即场景A;②非正常情况下,由于中间覆土层、塑料垃圾等弱透水介质的存在可能导致渗滤液积存于堆体中间,即场景B. 为此,通过COMSOL建立简化理想模型[24]以模拟渗滤液积存于HDPE膜上和渗滤液积存于堆体中间的两种场景(见图3),用于研究不同填埋场地高度以及不同渗滤液水位、位置和阻值在填埋场中电阻率的异常分布,在上述不同情况下,模拟川字型装置采集电势差分数据,作为EConvNet-C的训练集和测试集. 详细模拟过程:首先,建立一个倒梯形六面体模拟填埋场,其中填埋堆体设置两种电阻率,分别代表渗滤液饱和区域与非饱和区域;其次,将填埋场库底和四周设置高电阻率值(1017Ω∙m),模拟HDPE膜的高阻特性,场外的长方体模拟大地;最后,模拟川字型装置采集数据,川字型装置供电测线32个电极,极距为2 m,测量测线64个电极.

图3 渗滤液堆积形式的三维理论模型示意Fig.3 The schematic diagram of three-dimensional theoretical model of leachate accumulation form
通过改变填埋堆体高度(6~10 m之间等间距设置5个不同高度)、渗滤液水位(0.1~4 m之间等间距设置40个水位)以及填埋物质和渗滤液的材料参数(电阻率和相对介电常数),共获得600组具有不同堆体高度和渗滤液水位的样本,基本包含大部分野外渗滤液情况,2种代表性场景下堆体高度和渗滤液水位情况见图3.
电场控制方程:对于代表性渗滤液场地的几何模型,电法装置探测过程中电流源S产生的电场分布服从泊松分布[25]:

式中:ρ为电阻率,Ω∙m;φ为电势,V;jc为电荷密度,A/m2. 给定模型中的电阻率,则可计算介质内任一点的电势.
样本数据获取:用川字型装置采集电势数据并对电势两两相减处理成电势差分数据,每个样本包含992×2 016个数据点. 通过改变模型的参数,川字型装置均能获取600组样本作为反演模型的数据,表示为为电势差分样本,为真电阻率数据,将样本D按照比例7∶3划分为训练数据集和测试数据集,分别为420和180个. 其中训练集用于训练模型,测试集用来对模型结果进行验证.
1.2.2.2 EConvNet-C非线性反演模型
与传统高密度电法探测装置不同,川字型探测装置的视电阻率无法使用基于U-Net的结构EConvNet-T进行特征学习,针对川字型探测装置特点,提出了一种基于电势差分数据的川字型探测装置采集数据输入并进行重组的策略,作为EConvNet-C反演网络的输入基础.
首先,将川字型装置采集的电势数据进行两两相减的电势差分数据重组为EConvNet-C的992个通道的输入,每个通道的数据量可达到2 016个,使用MLP对缺乏空间对应关系的电势差分数据进行处理.当反演区域为64 m×12 m时,对992个通道的电势差分数据采用3次全连接网络进行重构,得到992个对应的小尺度(32 m×6 m)低分辨率特征图像. 在此基础上,对重建的低分辨率特征图像进行特征重组(992×32×6),采用EConvNet-C预测电阻率模型.
EConvNet-C网络的参数设置:中间层激活函数为Relu,末层为Sigmoid;学习率为10−3;训练轮数为5 000,优化器为Adam. EConvNet-C网络结构如图4所示.

图4 EConvNet-C网络结构Fig.4 The network structure of EConvNet-C
1.2.3 传统装置的反演
为验证并比较ConvNet-C的有效性和优势,将所得结果分别与传统装置(Wenner装置,二极装置)通过线性反演算法−LS算法得到的结果以及通过EConvNet-T算法得到的结果进行比较. 其中,传统装置的EConvNet-T反演使用U-Net网络的编码-解码结构,编码结构先经过若干个卷积层和池化层提取特征并得到分辨率较低的高维特征图,可以有效地捕捉上下文信息. 而解码结构将上下文信息传播到高分辨率层可以较好地预测位置信息,此外还通过跳跃连接填补底层信息以提高分割精度. 调整网络的深度和宽度会使其更适应视电阻率数据的规模. EConvNet-T网络结构如图5所示.
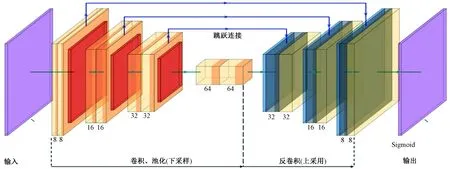
图5 EConvNet-T网络结构Fig.5 The network structure of EConvNet-T
1.3 实际场地应用
采用1.2.2.1节中COMSOL模型获取的测试数据集和江西省某危废填埋场实测数据来验证EConvNet-C的有效性和准确性. 实测场地为江西省某危废填埋场,库区占地总面积约为196 393 m2,总库容约为93.5×104m3(见图6). 探测装置采用Wenner装置、二极装置和川字型装置. 现场测线布置:Wenner装置、二极装置的测线长均为50.4 m,电极极距均为0.8 m,共64个电极;川字型装置中供电电极两条供电测线长均为64 m,采集测线长均为64 m,电极极距分别为2 m和1 m.
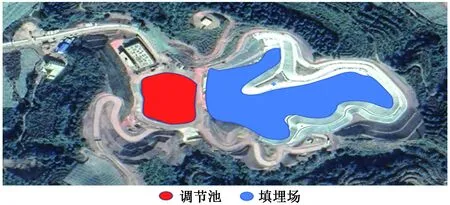
图6 江西省某危废填埋场位置结构示意Fig.6 The location structure of a hazardous waste landfill site in Jiangxi Province
2 结果与讨论
从180个测试集中选择4个填埋场(堆体高度和渗滤液水位不同)进行方法验证和对比(其结构见表1),其中填埋场1和填埋场2属于代表性场景A,填埋场3和填埋场4属于代表性场景B. 使用川字型装置采集观测数据,并使用EConvNet-C算法进行反演,得到渗滤液液位高度. 为便于对比,还利用传统装置(Wenner装置,二极装置)对上述两种代表性场景下的4个填埋场进行了电阻率数据采集,采集数据分别利用LS算法和EConvNet-T算法进行了反演.

表1 代表性场景下填埋场的理论模型结构Table 1 The theoretical model structure of landfill in representative scenarios
2.1 基于川字型装置的EConvNet-C反演结果
基于川字型装置EConvNet-C的反演结果如图7所示. 以场景A中填埋场1为例,从图7(a)可以看出,电阻率存在明显的分层特征,一共可分为4层,从上到下电阻率依次约为19.26、13.93、3.27和10 000 Ω∙m. 其中,第3层电阻率值最低,约为3.27 Ω∙m,厚度为1.10 m,判断为渗滤液区域;该层以下电阻率急剧升高,达到10 000 Ω∙m数量级,显然该层与上层分界即为库底HDPE膜所在位置. 第2层是渗滤液区域与填埋物质区域之间的过渡层,这是由EConvNet-C反演算法在训练中过拟合产生的局部误差导致. 总体上电阻率垂向分布与实际渗滤液分布规律较为一致.

图7 川字型装置下EConvNet-C反演断面Fig.7 Cross-sectional view of EConvNet-C inversion under the ‘Chuan’ device
采用均方误差(MSE)[26]对EConvNet-C非线性反演算法的性能进行评价,MSE是表征非线性反演获得的电阻值与实际电阻率值之间偏差的指标,其值越小,表示算法的反演性能越好,反演误差越小[27],通过式(2)进行计算. 结果表明,在场景A中填埋场1和填埋场2的EConvNet-C的MSE均在0.002 30以下,而其他学者采用线性反演算法得到的MSE在0.20~0.60之间[28],明显高于笔者所得结果.

式中,N表示样本总数,zi表示第i个训练样本的真实值,表示第i个训练样本的预测值.
将低阻区域高度确定为渗滤液的液位高度. 通过式(3)量化评估水位的探测精度(ACC),结果表明,场景A中EConvNet-C的探测精度均在90.0%以上.

式中:Hp为识别的渗滤液液位高度,m;H0为实际的渗滤液液位高度,m;Sp为识别的渗滤液区域;S0为实际的渗滤液区域.
2.2 不同渗滤液积存条件对探测结果的影响
首先分析正常场景下(场景A,也即渗滤液积存在库底HDPE膜上方)渗滤液水位高度变化对探测结果的影响. 具有不同渗滤液水位的填埋场1和填埋场2的EConvNet-C反演结果见图7(a)(b),反演结果的MSE见表2. 由表2可见:从EConvNet-C反演结果的MSE来看,填埋场1和填埋场2的MSE均非常小,分别为0.002 30和0.001 73,且二者差异极小;另外,从探测精度指标ACC来看,填埋场1和填埋场2反演的渗滤液位置的ACC分别为−6.00~−4.90 m和−8.00~−6.60 m,液位高度分别为1.10 m和1.40 m;二者的探测精度分别90.0%和93.3%,均达到90%以上. 显然,正常场景下,不论水位如何变化,都能取得较好的探测准确度.
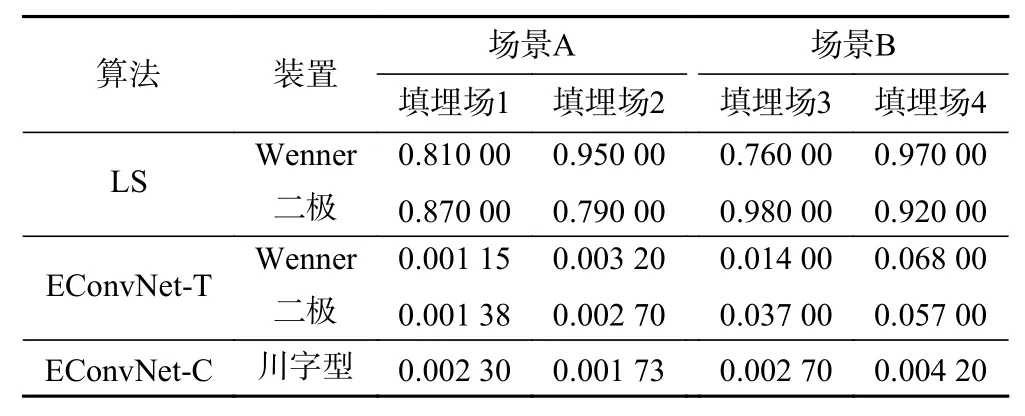
表2 三种反演算法MSE的比较Table 2 MSE comparison results of three algorithms
其次对比正常场景和非正常场景(场景B,也即渗滤液积存在堆体中部)下的EConvNet-C反演性能和渗滤液水位探测精度,以填埋场1和填埋场4为例进行对比,填埋场4条件下MSE为0.004 20,是填埋场1的1.82倍;渗滤液位置为−7.00~−4.60 m,液位高度为2.40 m,探测精度ACC为80.0%,是填埋场1的0.89倍. 显然在非正常情况下,探测精度有所降低,但总体来看依然在80.0%以上,仍然保留了较高的探测准确度. 非正常场景下探测精度下降的原因可能是,渗滤液积存在中部时,渗滤液下方介质从电阻率较大的HDPE膜变化为相对较小的非饱和垃圾区,与渗滤液之间的电阻率差异变小,导致更难分辨.
2.3 与不同探测方法的比较
3种反演算法的MSE结果如表2所示,基于川字型装置的EConvNet-C反演算法的MSE结果明显小于基于传统装置的LS算法反演探测结果,如场景A中的填埋场1,EConvNet-C反演算法是LS算法反演探测的0.002 8倍;但与基于传统装置的EConvNet-T反演算法而言,二者并无明显差异,MSE都在10−3数量级,偶尔会出现EConvNet-C的MSE大于EConvNet-T(如场景A的填埋场1),也会出现EConvNet-C的MSE小于EConvNet-T(如场景A的填埋场2)的情况. 这可能是反演精度较高时的数值误差的偶然性体现.
2.3.1 场景A条件下不同方法的比较
对比正常场景(场景A)下不同方法的性能和探测精度,填埋场1和填埋场2的反演结果如表3和图8所示. 以填埋场1为例进行说明,不同探测方法的结果见图8(a)~(d). 结果显示,在Wenner装置和二极装置下LS算法的反演结果中,从顶部向底部电阻率逐渐升高,以图7(a)为例,其底部电阻率为72 Ω∙m,顶部电阻率为10.5 Ω∙m. 而实际上渗滤液积存于底部,该位置处电阻率应是最低的,电阻率较小的区域分别对应深度−3.60~−1.50和−3.00~−0.50 m,而实际渗滤液水位在−6.00~−5.00 m之间,显然该方法无法准确判断渗滤液的位置和厚度. 这是受到HDPE膜高阻的影响,电阻率法存在体积效应,反映的是一定体积的电阻率,而HDPE膜的电阻率近似无穷大,在体积作用下其相邻区域都呈现出异常高阻[29-30]. 另外,LS算法需要对目标函数反复迭代,使得噪声对反演结果的影响随着迭代次数的增加而逐步加大,EConvNet-C不考虑初始模型的影响,也不计算目标函数的梯度[31],因此能够抑制数据噪声对反演结果的影响.

图8 场景A中不同装置下LS、EConvNet-T反演断面Fig.8 The cross-sectional map of LS, EConvNet-T and under different devices in scenario A

表3 场景A条件下不同方法反演的渗滤液液位高度Table 3 Leachate level heights retrieved by different methods in scenario A
基于Wenner装置和二极装置的EConvNet-T探测的渗滤液位置分别为−5.95~−5.14和−5.99~−4.75 m,渗滤液厚度分别为0.81和1.24 m,渗滤液水位探测误差分别为81.0%和76.0%,虽然相比基于传统装置的LS算法有着明显改进,基本能够识别渗滤液高度和厚度,但对比基于川字型装置的EConvNet-C反演算法,其探测精度下降了10.0%~15.6%.
2.3.2 场景B条件下不同方法的比较
对比非正常场景(场景B)下不同方法的探测结果,填埋场3和填埋场4的反演结果如表4和图9所示. 以填埋场4为例进行说明. 不同探测方法的结果见图9(e)~(h). 结果显示,在两种传统装置下LS算法的反演结果图中,电阻率较小的区域分别对应深度−6.00~−3.50 和−1.50~−5.00 m,而实际渗滤液水位在−6.00~−4.50 m之间,但基于Wenner装置的LS算法反演的渗滤液分为了左右两块区域,该方法在场景B中也无法准确判断渗滤液的位置和厚度,其原因与场景A中一样,是由填埋场底部HDPE膜的高阻影响所致.

表4 场景B条件下不同方法反演的渗滤液液位高度Table 4 Leachate level heights retrieved by different methods in scenario B
基于两种传统装置的EConvNet-T探测的渗滤液位置分别为−7.02~−5.61和−7.06~−4.51 m,渗滤液厚度分别为1.41和2.55 m,渗滤液水位探测误差分别为70.5%和72.5%,虽然相比基于传统装置的LS算法有着明显改进,基本能够识别渗滤液高度和厚度,但对比基于川字型装置的EConvNet-C反演算法,其探测精度下降了9.3%~11.9%.
2.4 现场实测数据反演结果
使用LS算法和EConvNet-T模型的反演结果(Wenner装置,二极装置)和EConvNet-C模型反演结果(川字型装置)如图10所示.
由图10可见,在Wenner装置和二极装置下,LS算法的反演断面结果中顶部有低阻异常,这是由于受到填埋场一部分渗滤液水分蒸发或降雨产生的影响[32]. 由于HDPE膜高阻的影响,无法确定渗滤液情况. 而EConvNet-T和EConvNet-C能够识别出渗滤液水位信息,其中Wenner装置探测到的水位为1.52 m,二极装置为2.27 m,川字型装置为1.84 m. 工作人员通过现场开挖确定渗滤液水位为1.90 m. 综上,EConvNet-T和EConvNet-C能够反演出实际场地的渗滤液水位,EConvNet-C的精度最高. 另外,由图10(c)(d)(e)没有反映出顶部的低阻异常,这是由于深度学习算法受学习样本的影响,开始的学习样本没有设计顶部存在低阻的情况,所以无法有效学习.
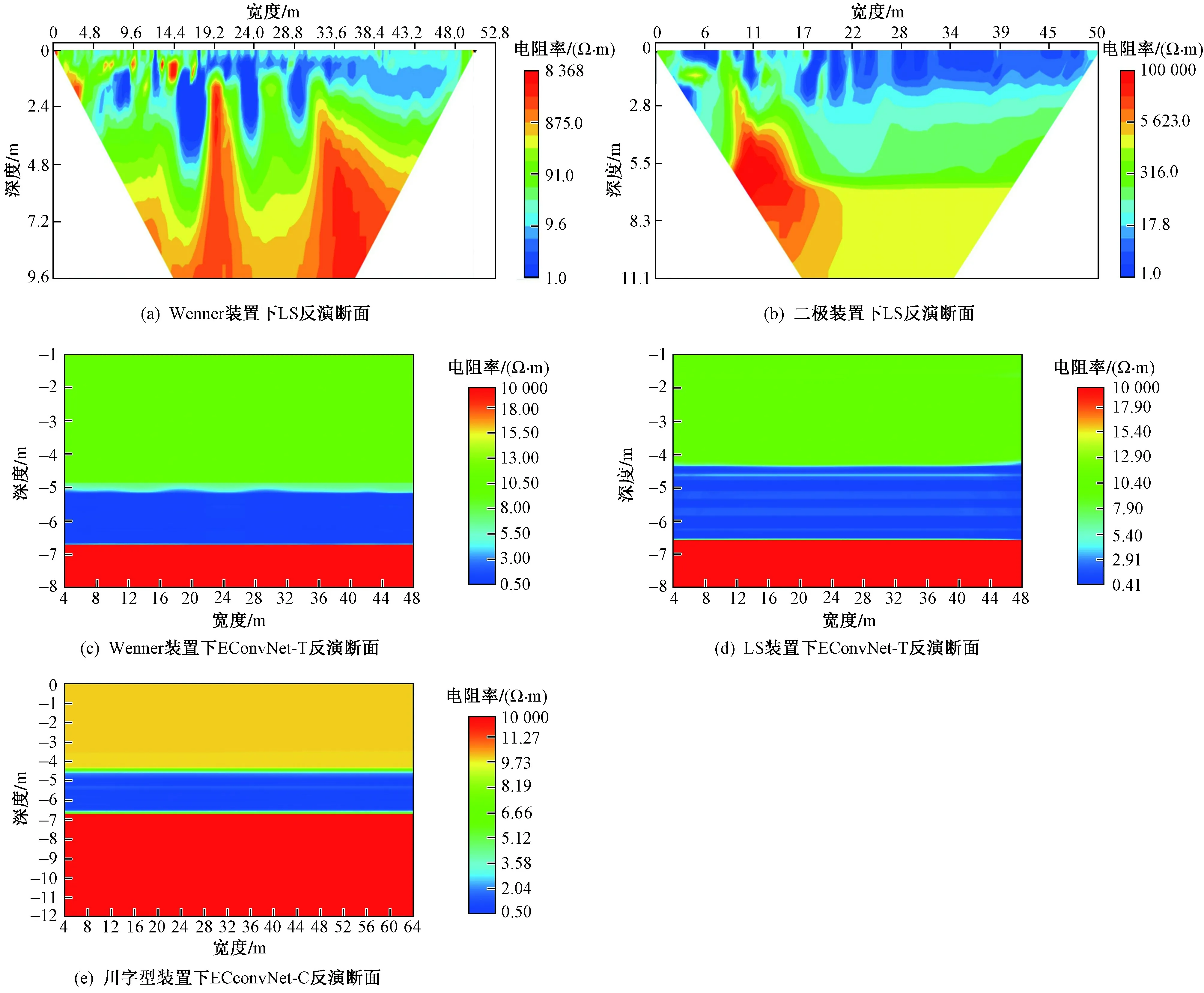
图10 现场实测数据LS, EConvNet-T, EConvNet-C反演断面图Fig.10 LS, EConvNet-T, EConvNet-C inversion section view of field data
2.5 不同探测方法的优缺点
从耗时、探测精度以及探测方法适用性3个方面对比分析不同方法的优缺点,结果如表5所示. 从耗时上,传统装置Wenner装置采集的数据包含651个数据点,耗时22 min;二极装置包含690个数据,耗时23 min;川字型装置包含992个数据点,耗时33 min,单次探测时间超过传统装置的50%.

表5 渗滤液水位探测中不同方法的优缺点对比Table 5 Comparison of advantages and disadvantages of different methods in leachate level detection
从探测精度来看,传统装置+传统反演算法的组合几乎失效,无法探测填埋场底部的渗滤液水位;在传统装置下EConvNet-T反演算法和在川字型装置下EConvNet-C反演算法均能够探测渗滤液水位,EConvNet-C的探测精度最大,EConvNet-T其次,LS算法无法探测.
从适用性角度看,LS不需要构建数据集,能够直接探测没有高阻影响的复杂的地质结构;而EConvNet-C需要提前知道地质结构以构建数据集用于EConvNet-C的训练和测试,因此对于复杂的地质结构或地质结构未知情况,难以使用EConvNet-C反演算法进行探测. 但在填埋场场景下,由于堆体是人工构筑的,且垂向结构相对简单,变量仅为渗滤液水位,可以提前通过构建模拟数据集进行学习,其适用性较差的局限可忽略.
3 结论
a) 基于川字型装置的EConvNet-C反演结果可以明显反映介质类型及含水率差异导致的电阻率分层特征.
b) 基于川字型装置的EConvNet-C反演中,场景A的两个填埋场MSE分别为0.00 200和0.00 173,场景B的两个填埋场MSE分别为0.00 270和0.00 420,分别是场景A的0.74和0.42倍;场景A的两个填埋场探测精度ACC分别为90.0%和93.3%,场景B的两个填埋场ACC均为80.0%,分别是场景A的1.125和1.167倍.
c) EConvNet-C能准确识别填埋场渗滤液水位,在场景A中渗滤液水位探测精度为90%~93.3%,EConvNet-T为76.0%~84.7%;在场景B条件下,EConvNet-C探测精度为80%,EConvNet-T为70.5%~72.6%;而LS算法在HDPE膜高阻特性的影响下只能找到HDPE膜的部分区域,无法有效识别渗滤液水位.
猜你喜欢
中学生数理化·中考版(2024年2期)2024-05-23 10:11:40
国学(2021年0期)2022-01-18 05:59:08
环境卫生工程(2021年4期)2021-10-13 06:52:24
装备制造技术(2020年3期)2020-12-25 05:22:06
环境卫生工程(2020年3期)2020-07-27 01:19:18
系统工程与电子技术(2016年4期)2016-08-24 07:46:08
新疆农垦科技(2016年2期)2016-08-21 13:50:22
新疆农垦科技(2016年2期)2016-08-21 13:50:18
中国机械工程(2015年13期)2015-12-16 12:25:40
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:09