
粒子群优化模糊PID的四旋翼飞行器控制
2022-08-23 06:16刘祎玮唐路平王咏婷魏伶俐
自动化与仪表 2022年8期
刘祎玮,唐路平,王咏婷,魏伶俐
(南京林业大学 机械电子工程学院,南京 210000)
四旋翼飞行器作为常用的无人机之一,因具有体积小、操作简单、可携带负重等优点,被广泛地应用于影视、商业及军事等领域。 但是由于四旋翼飞行器具有强耦合、非线性、多变量等特性[1],其闭环控制稳定的问题一直是研究热点之一。 近年来,国内外很多学者对此问题进行了大量研究。 文献[2]采用反步法来搭建四旋翼的控制系统,反步法具有良好的跟踪性、无超调且调整时间快速等特点,但反步法设计控制器较为复杂且该方法主要针对于严格满足反馈控制系统的结构;文献[3]采用四元数反馈控制方法研究四旋翼的姿态控制问题,利用四元数反馈控制方法搭建的控制器具有姿态解算无奇异点、结构简单等特征;文献[4]采用模糊PID 控制对姿态控制问题进行了优化,利用模糊PID 控制可以更好的提高四旋翼飞行器的动态稳定性,且结构简单便于实现,但由于模糊控制器中模糊语言的特性导致了其过度依赖于专家经验且控制精度有待提高。
基于上述研究成果,为更好地提高四旋翼飞行器的动态性能及控制精度,本文提出将粒子群算法与模糊控制算法相结合,设计了一种基于粒子群模糊PID 算法的四旋翼飞行器控制系统。 该系统通过粒子群优化算法对量化因子Cke、比例因子Ckp,Cki,Ckd进行迭代寻优再通过模糊控制器中的模糊化与反模糊化处理得出最优权重因子,实现了对控制器参数的智能调整,相对提高了系统的控制精度和动态性能,且该系统具有结构简单、可操作性强等优点,有望被应用于实际的无人机控制设计工作。
1 四旋翼飞行器控制系统
1.1 非线性数学模型的建立
四旋翼是具有六自由度的强耦合模型[5],为建立其数学模型,定义两个坐标系:地球坐标系E(xe,ye,ze)以及机体坐标系B(xb,yb,zb)。 地球坐标系相对于原点Oe做平移运动, 机体坐标系相对于原点Ob做旋转运动。ω1,ω2,ω3,ω4分别为四旋翼的旋转角速度,F1,F2,F3,F4为4 个旋翼产生的力,如图1 所示。
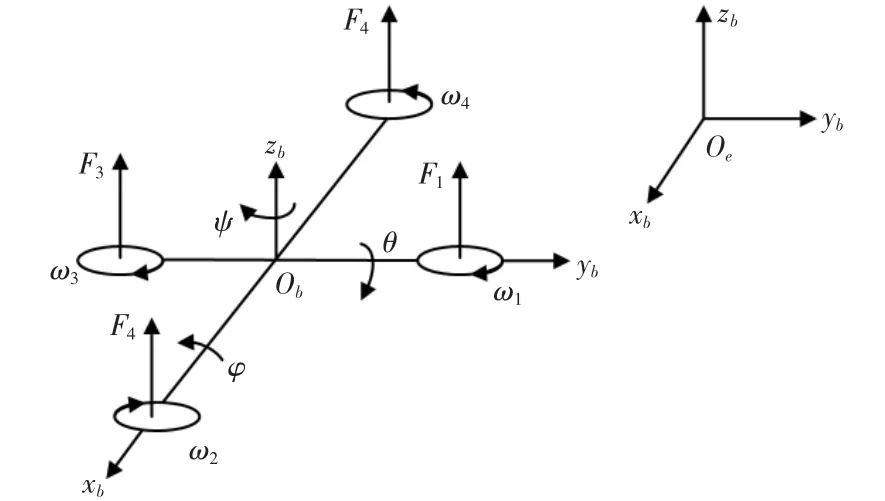
图1 机体坐标系与地球坐标系Fig.1 Aircraft-body coordinate frame and Earth coordinate system
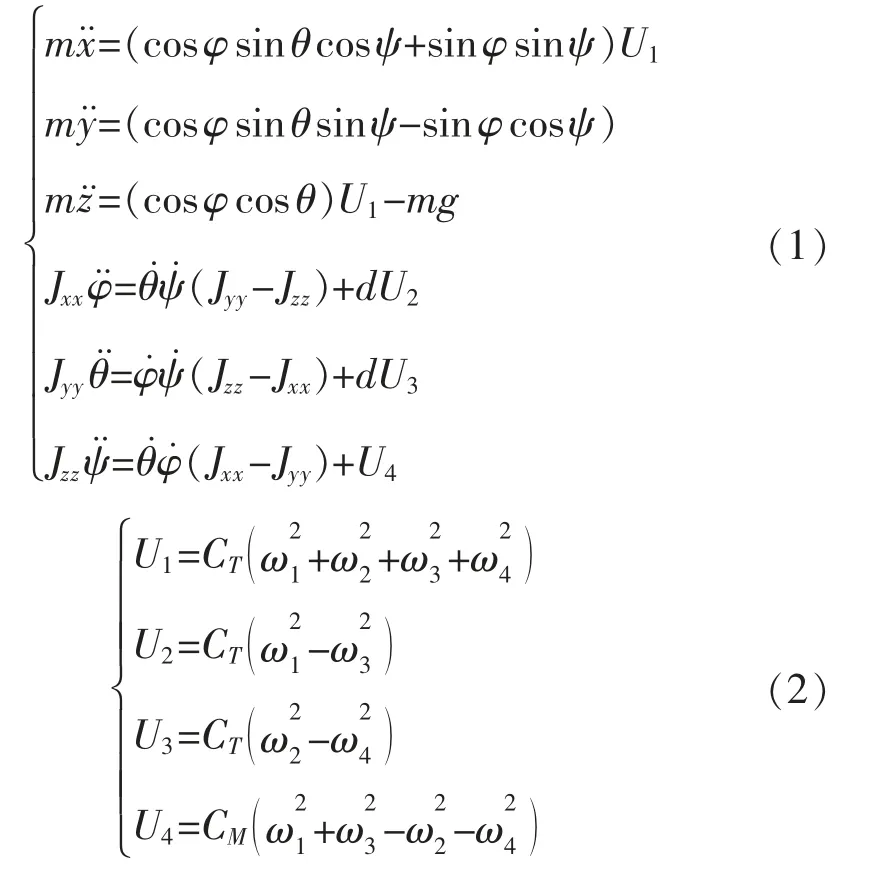
由于实际问题中空气阻力以及陀螺效应产生的影响较小,因此可以忽略[6]。 根据牛顿-欧拉方程并经过一系列数学运算最终得出四旋翼飞行器的非线性模型[7],如式(1)和式(2)所示:
1.2 控制系统设计
由四旋翼非线性模型可知,系统控制部分主要可以分为位置控制与姿态控制。 根据其非线性数学模型特性,采用串级双闭环控制系统,即内环姿态控制部分以及外环位置控制部分,具体控制结构如图2 所示。
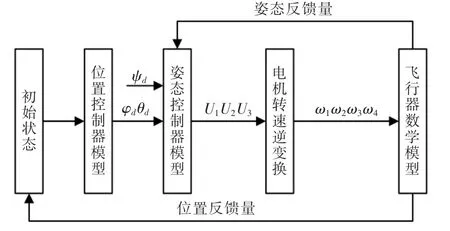
图2 系统控制结构Fig.2 Control structure of system
人为给与初始状态(xd,yd,zd,ψd)即期望的x,y,z方向上的位置以及期望的偏航角ψd,然后经过位置控制器反解出四旋翼飞行器在机体坐标系下的总合力U1,以及期望的俯仰角θd,期望滚转角φd。 其中总合力U1由位置控制器产生的x,y,z 轴向上的分力求得。 然后姿态控制器利用求解出的θd,φd以及给定的期望偏航角ψd, 求得驱使ψ,θ,φd变化的力U2,U3,U4,经过对电机转速的逆变换后求得4 个旋翼的转速ω1,ω2,ω3,ω4代入飞行器的非线性数学模型中并得出12 个状态反馈量。 基于上述串联双闭环控制控制结构搭建控制对象模型以进行后续的控制算法研究。
2 粒子群模糊PID 控制系统的设计
2.1 模糊PID 控制系统的设计
由于传统PID 控制存在人工调参较为繁琐、动态性能较低的问题[8]。 因此在传统PID 控制器的基础上加入模糊控制部分,改进为模糊PID 控制器。模糊PID 控制器工作原理为:通过不断检查系统实际轨迹与期望轨迹的偏差以及偏差的变化率并用量化因子Cke对其进行整理计算得出其对应的模糊值,将之与由专家经验编写的模糊规则表进行匹配,推理计算得出比例因子Ckp,Cki,Ckd并输入到PID控制器当中,不断地对输入量进行调整从而达到对系统控制的优化。
根据四旋翼飞行器动力学方程的性质,本次实验选择二维模糊控制算法,即将实际轨迹与期望轨迹的误差e 及误差的变化率ec 作为输入量,PID 控制器的3 个参数变量作为输出变量。 变量的基本论域均设为[-3,3];并使用七段式模糊语言值;模糊子集为{NB,NM,NS,Z,PS,PM,PB}对应{负大,负中,负小,零,正小,正中,正大};选取对称式三角型隶属函数作为隶属度函数;采用重心法去模糊化。
2.2 粒子群优化算法分析及优化流程
由于模糊PID 控制存在抗干扰性较差、调节精度较低等问题[9],在模糊PID 控制的基础上加入粒子群优化环节改进为粒子群模糊PID 控制器。
粒子群算法于1995年由Kennedy 及Eberhart提出,该算法核心思想是将每个粒子看作成一只鸟,鸟群捕食的过程即为粒子寻求最优解的过程[10]。 每个粒子均具有速度以及位置属性,在D 维空间中的N 个粒子的速度与位置向量可以表示为Vi=(vi1,vi2,vi3,…,vid),Xi=(xi1,xi2,xi3,…,xid)每个粒子在寻找途中的最佳值即为最优解。 粒子本身找到的最优解为个体最优即Pt,粒子群整体对比找到的最优解为全局最优即gt[11]。 粒子群算法通过粒子的不断迭代寻找最优解,进而达到对系统参数的优化。
系统在迭代过程中,其速度与位置的更新符合以下规律,如式(3)所示:

式中:速度的更新规律由3 部分组成,分别为社会认知、自我认知以及前一时刻速度的继承部分[12]。ω 为惯性因子, 体现前一时刻速度对该时刻速度的影响;c1,c2为加速常数,c1影响个体最优。当c1过大时,粒子群整体受个体认知影响过大,容易陷入局部最优;当c2过大时,社会认知部分的影响过大,使粒子群整体过早地达到全局最优,出现早熟情况[13]。对ω 的权重更新采用线性递归法, 更新公式如式(4)所示:

式中:t 为当前迭代次数;tmax为最大迭代次数;ωmax为最大惯性因子;ωmin为最小惯性因子。适应值函数采用ITAE 指标,其可以反映出误差与时间的关系,适应值越小则表明控制性能越优良[14],如式(5)所示:
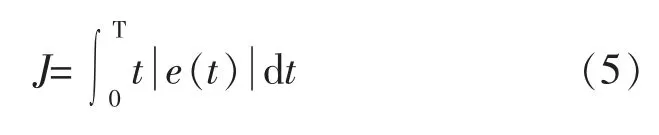
式中:e 为系统误差;T 为系统运行时间。
本次实验采用粒子群算法通过不断在线迭代优化模糊PID 控制的输入输出, 即优化量化因子Cke和比例因子Ckp,Cki,Ckd,再通过模糊控制算法中的模糊化与反模糊化处理,动态的调节权重因子,使系统的动态性能以及控制精度达到最佳。 控制结构如图3 所示。
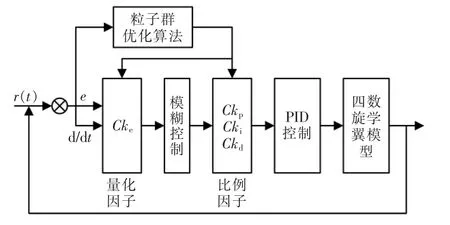
图3 粒子群模糊PID 控制器结构Fig.3 Particle swarm fuzzy PID controller structure
在Matlab 环境中根据粒子群算法设计搭建Simulink 模型并编写相应的程序,如图4 所示。并由此结构验证该算法控制下的无人机动态特性。
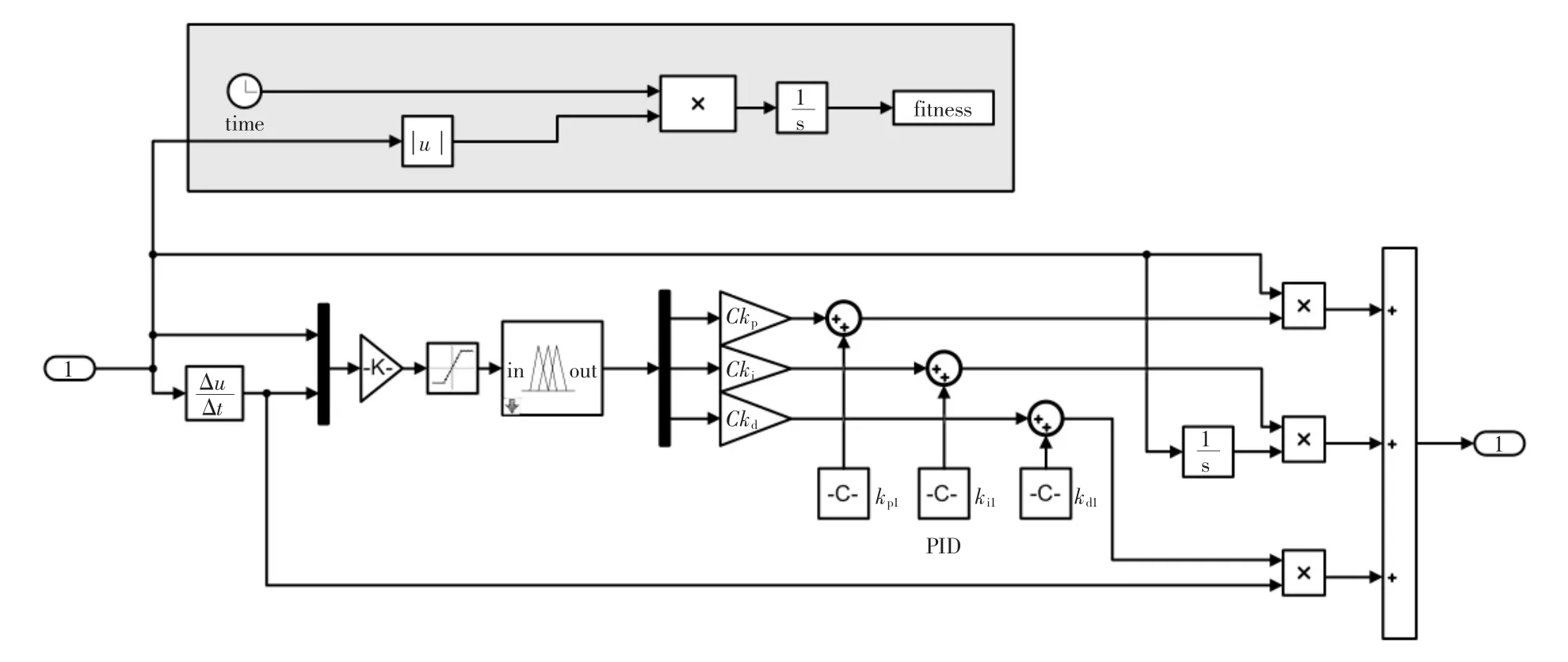
图4 基于粒子群算法的模糊PID 控制系统仿真图Fig.4 Simulation diagram of fuzzy PID control system based on particle swarm optimization algorithm
3 实验仿真
3.1 粒子群模糊PID 阶跃响应实验
在Matlab 环境下搭建好Simulink 模型后进行实验仿真。 选取X 轴方向的运动作为研究对象,给予系模型一阶跃信号,设定目标值为5,观察各控制状态下的相应情况判断四旋翼飞行器的动态性能,仿真结果如图5 所示。
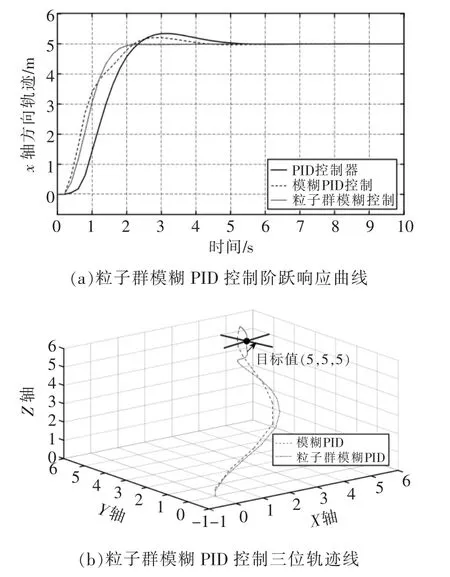
图5 阶跃响应下各控制系统仿真结果Fig.5 Simulation results of each control system under step response
由图5(a)可看出相较于模糊PID 控制器和传统PID 控制器,粒子群模糊PID 控制器的超调量更小,可以做到基本无超调。 且粒子群模糊PID 控制器的响应速度更快,当误差带取±2%时传统PID 控制的调节时间为2.237 s,模糊PID 控制的调节时间为1.838 s,而粒子群模糊PID 控制器的调节时间仅为0.954 s,极大地提高了系统的动态性能和控制精度,加快了收敛速度。 在三维空间中的运动,各控制状态下的飞行器均可达到目标位置,但粒子群模糊PID 控制相较于模糊PID 控制飞行路径更优, 运动更加平滑,如图5(b)所示。 具体动态性能指标如表1 所示。

表1 动态性能对比Tab.1 Dynamic performance comparison
3.2 粒子群模糊PID 自主跟踪实验
为验证粒子群模糊PID 控制的自主跟踪性能,给予系统一方波信号,设定目标值为5,信号周期为20,占空比为50%,采用粒子群模糊PID 控制与模糊PID 控制进行比较实验,系统响应如图6所示。
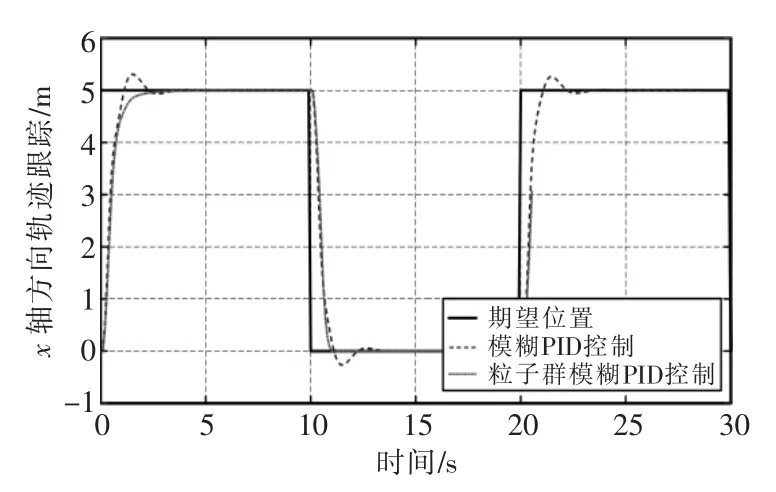
图6 粒子群模糊PID 控制器的自主跟踪实验Fig.6 Autonomous tracking experiment of particle swarm fuzzy PID controller
由图6 可知粒子群模糊PID 控制可以良好地完成自主跟踪实验,相较于模糊PID 控制具有更好的动态特性。在突变发生后系统可以快速收敛到误差允许的范围内,相较于模糊PID 其超调量大大减小,响应速度也更快。以初始阶段为例,模糊PID 的超调量为6.16%,而粒子群算法改进后可以做到基本无超调;达到误差带允许误差范围内的时间也由原来的2.038 s 降为1.750 s, 具体动态性能指标如表2 所示。
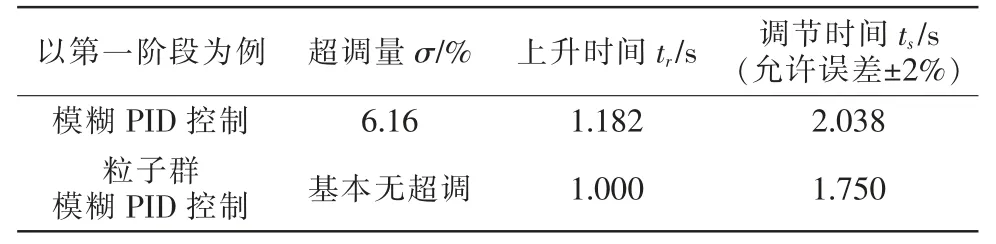
表2 自主跟踪性能对比Tab.2 Autonomous tracking performance comparison
3.3 粒子群模糊PID 鲁棒性和抗干扰性实验
实际的内部信号环境具有很多干扰因素,为验证粒子群模糊PID 控制下四旋翼飞行器的鲁棒性,分别进行突发干扰实验以及长期干扰实验。 在阶跃响应稳定后的第5 秒加入瞬时干扰信号验证控制系统在突发干扰下的稳定性;在阶跃响应稳定后的第5 秒到第10 秒的时间内加入长期的干扰信号验证控制系统面对长期干扰下的稳定性。 选取模糊PID 控制进行对比,实验结果如图7 所示。
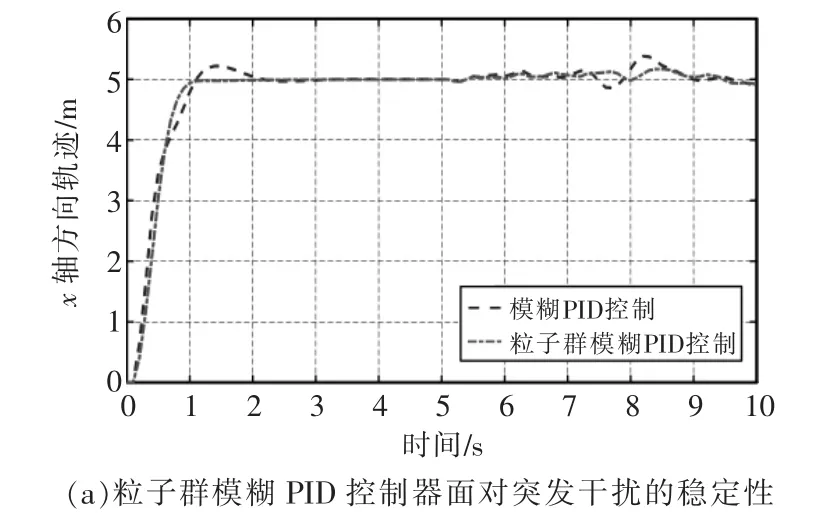
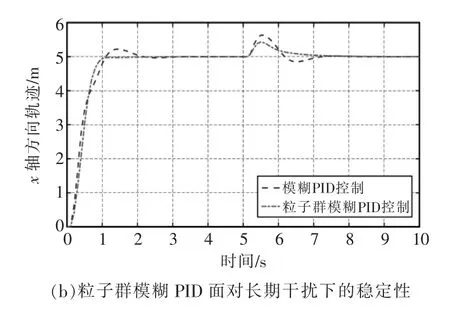
图7 粒子群模糊PID 控制稳定性实验Fig.7 Particle swarm fuzzy PID control stability experiment
实验结果表明,在第5 秒加入瞬态干扰因素后,粒子群模糊PID 控制相较于模糊PID 控制展现了更加优良的动态性能,在波动后可以快速平稳的回归到稳定值。 而在面对第5 秒到第10 秒的长期干扰时粒子群模糊PID 控制可以基本维持在误差允许的范围内,维持相对稳定。 因此粒子群模糊PID控制具有良好的鲁棒性。
在外界环境中存在大量的外界干扰因素,如风力等。 为验证粒子群模糊PID 控制下四旋翼飞行器的抗干扰性能,在系统达到稳定后的第5 秒引入外界干扰因素,实验结果如图8 所示。
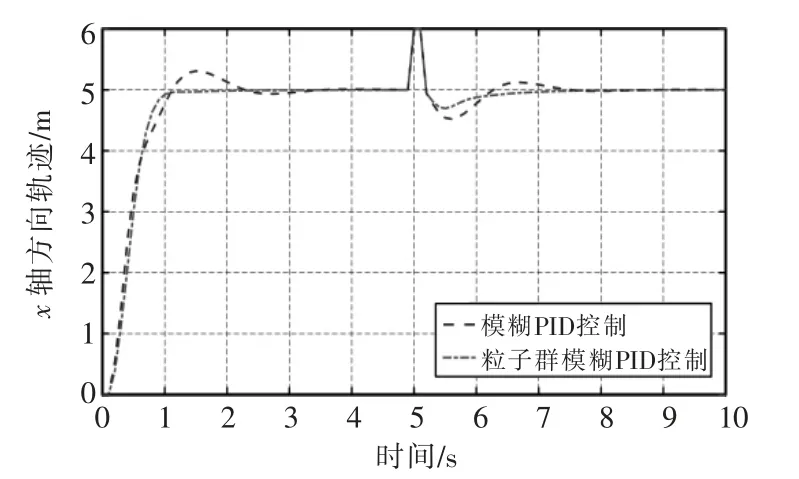
图8 粒子群模糊PID 面对外界环境干扰下的稳定性Fig.8 Stability of particle swarm fuzzy PID in the face of external environmental interference
实验结果表明,粒子群模糊PID 在面对外界影响时具有很好的抗干扰特性,可以快速稳定的回归到稳定值,相较于模糊PID 控制抗干扰性有了明显的提升。
4 结语
为提高四旋翼飞行器的控制精度及动态特性,本文在Matlab 环境下设计了一种基于粒子群模糊PID 控制算法的四旋翼飞行器并同时设计了基于模糊PID 控制算法与传统PID 控制算法的四旋翼飞行器进行比较。 仿真结果表明,粒子群模糊PID 控制算法相较于其他两者具有更好的动态特性、抗干扰特性和控制精度。 面对自主跟踪问题,可以良好地完成任务目标,且超调量更小、收敛速度更快、鲁棒性更好、抗干扰性更强、工作效率更高,可以更好地完成对系统的控制工作,对实际四旋翼飞行器控制设计具有参考价值。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
宇航计测技术(2018年3期)2018-09-08
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
物联网技术(2017年7期)2017-07-20
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
