
虚拟直流电机惯性阻尼自适应控制策略
2022-08-23 06:16赵巧娥
自动化与仪表 2022年8期
徐 敏,赵巧娥
(山西大学 电力与建筑学院,太原 030013)
落实碳达峰、碳中和目标,构建以新能源为主体的新型电力系统是时代赋予的责任和使命,电力系统正形成高比例电力电子设备、低转动惯量特性[1]。 积极开展虚拟电机技术改造应用,对于提升系统稳定运行将至关重要[2]。
虚拟直流电机控制(VDCM)使变换器具备惯性阻尼特性[3]。 文献[4-6]均在阻尼系数和惯性系数固定的VDCM 基础上进行理论分析及仿真验证,只考虑惯性阻尼支撑, 未考虑系统对动态响应的要求;文献[7]中阻尼系数、惯性系数自适应函数分段太多且不连续;文献[8]引入调节参数和阈值,增加可调变量;文献[9]将阻尼系数、惯性系数对应阻尼比、超调量等绘制在一张图中, 可根据需求确定公共区,从而确定两系数范围,计算复杂。
本文在传统虚拟直流电机控制基础上,提出一种惯性系数和阻尼系数自适应策略。 该自适应函数仅分两段且变化连续,在抵抗扰动和恢复稳态时提供不同的惯性和阻尼,减小电压波动时间。 最后,通过Simulink 仿真对所提控制策略和其他自适应策略进行仿真对比,验证其有效性。
1 虚拟直流电机控制
双向DC/DC 变换器VDCM 控制框图如图1 所示,在电压电流双闭环中加入VDCM。 电压环不仅根据参考值Uref调节母线电压Udc,且产生系统功率需求参考;VDCM 部分利用直流电机电枢回路方程和机械方程,使变换器具备惯性和阻尼。 VDCM 环节输出电枢电流ia,不考虑变换器功率损耗,通过功率守恒得到蓄电池侧电流参考值ibat*。 通过PI 调节得到占空比d 以及触发信号,最终使储能及其变换器输出特性等效为直流电机,如图2 所示。

图1 双向DC/DC 变换器VDCM 控制框图Fig.1 Bidirectional DC/DC converter VDCM control block diagram

图2 VDCM 等效模型Fig.2 VDCM equivalent model
直流电机电枢回路方程为

式中:U 和Ea为机端电压和感应电动势;Ra和Ia为电枢电阻和电枢电流;CT为转矩系数;φ 为磁通;ω 为直流电机转速。
直流电机机械方程为

式中:J 为惯性系数;Tm为机械转矩;Te为电磁转矩;D 为阻尼系数;ω 和ωn为实际角速度和角速度参考值。
2 惯性阻尼自适应
2.1 小信号分析
在稳态工作点处添加扰动,结合图2 整理后可得DC/DC 变换器传递函数Gud和Gid为

式中:L 为蓄电池侧滤波电感;C 为母线侧电容。
结合图1 以及式(1)~式(5),可得整个控制闭环传递函数为
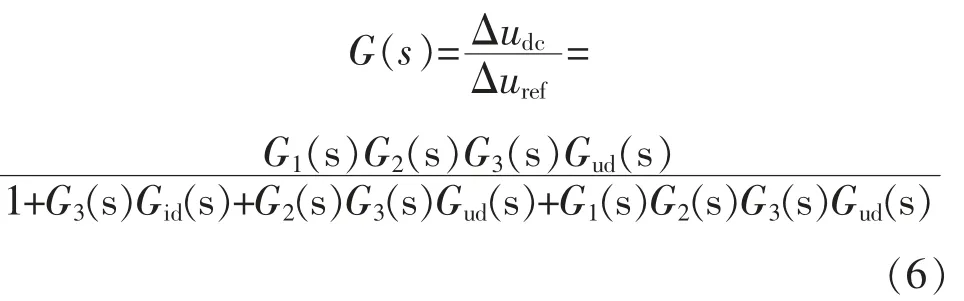
其中:

式 中:kpu,kiu为电压环PI参数;kpi,kii为电流环PI参数;Uref为电压参考值;Vm为载波峰值。
根据闭环传递函数,在MATLAB 中绘制惯性系数J 从2~8 的单位脉冲响应。 J 变化时的单位脉冲响应如图3 所示,可以看出,J 越小,电压超调量越大,恢复速度越快。 J 参数根轨迹如图4 所示,当J<0.461 时,根轨迹在右半平面,系统不稳定。 因此,电压处于稳态时选择较大J 抵抗扰动, 减小电压波动幅值;恢复时选择较小J 加快恢复速度,且J 应大于0.461。

图3 J 变化时的单位脉冲响应Fig.3 Unit impulse response when J changes

图4 J 参数根轨迹Fig.4 Root locus of the J parameter
阻尼系数D 从2.5~10 的单位脉冲响应如图5 所示。D 越大,恢复速度越快。单位阶跃响应如图6 所示,D 越大,稳态误差越大;D 取10 时,输出稳态值已经降到给定值的80%。 因此,D 在稳态时选取较小值,且不超过10;在恢复时可以选取较大值,来加快恢复速度。
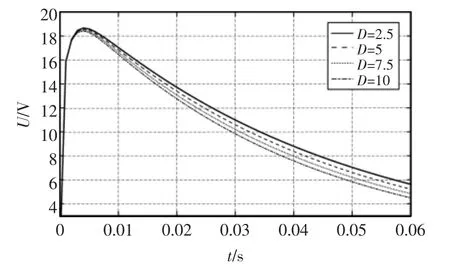
图5 D 变化时的单位脉冲响应Fig.5 Unit impulse response when D changes
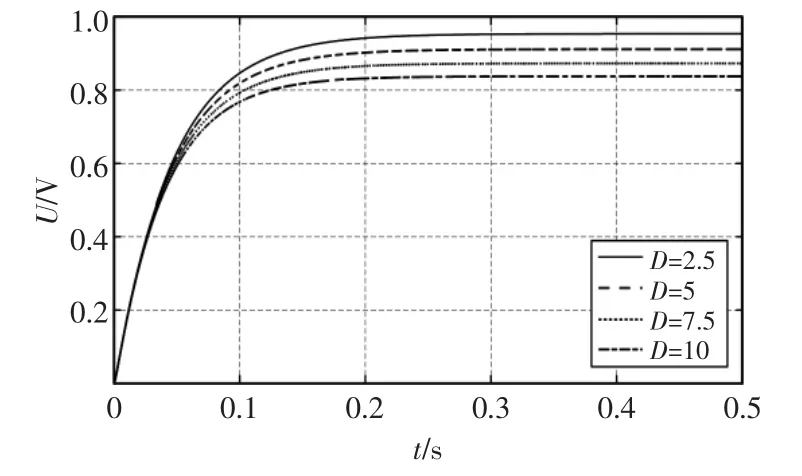
图6 D 变化时单位阶跃响应Fig.6 Unit step response when D changes
2.2 自适应控制策略
以负载突减为例,电压波动如图7 所示。 根据电压偏差变化趋势,提出一种自适应控制策略:

图7 受到扰动后电压动态变化Fig.7 Dynamic changes of disturbed voltage
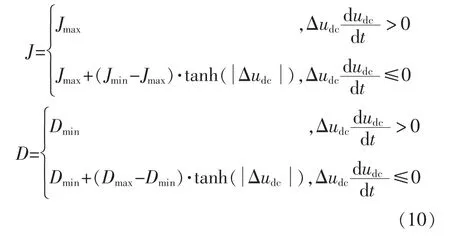
1)区间1 电压偏差增大,因其时间短,J 和D 选择较大固定值,提供惯性和阻尼支撑。 并避免不必要的系数变动增加控制复杂度甚至影响电压稳定。
2)区间2 电压偏差减小,J 采取较小值,D 选取较大值,使母线电压快速恢复至稳态。
3)恢复至稳态后,J 和D 回到固定值为下一次功率波动做准备。
满足上述条件的函数为
3 仿真验证
在MATLAB/Simulink 中,搭建直流微网模型如图8 所示。光伏侧变换器以最大功率输出,储能侧变换器采用虚拟直流电机控制,仿真参数如表1 所示。
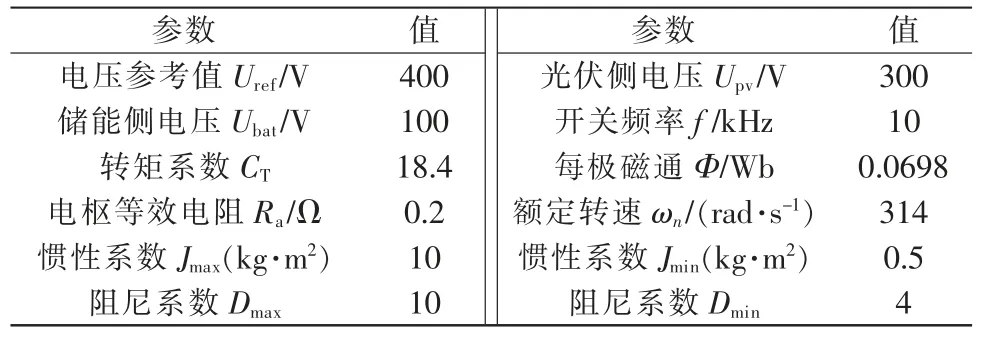
表1 仿真参数Tab.1 Simulation parameters
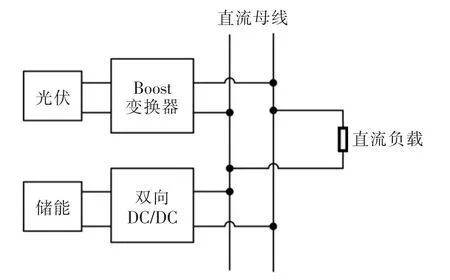
图8 直流微网模型Fig.8 DC microgrid model
负载功率如图9 所示,负载功率在0.3 s 时由25 kW 突减至10 kW,0.5 s 时突增至45 kW。储能变换器采用J,D 固定和自适应VDCM 对应直流母线电压波形如图10 所示,采用J,D 自适应控制时电压恢复至稳态速度更快。 对比文献[7-8]中自适应VDCM,直流母线电压波形如图11 所示。 J,D 采用文献[7]中自适应函数时,电压波动幅值和稳态误差较大且恢复速度慢;采用文献[8]中自适应函数时,初始阶段出现电压尖峰,负载功率变化小时,电压平滑且接近给定值,但在0.5 s 负载功率波动大时电压开始振荡, 阈值的设定可能会使电压不稳定,且增加控制复杂度。 本文所提自适应策略电压恢复时间短,且能承受较大功率波动。
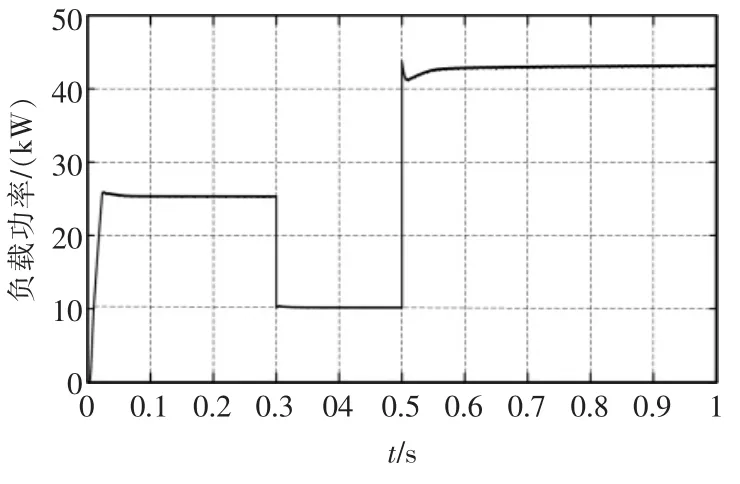
图9 负载功率Fig.9 Load power

图10 J,D 固定和自适应的VDCM 控制效果对比Fig.10 Comparison of the control effect of fixed and adaptive J,D of VDCM
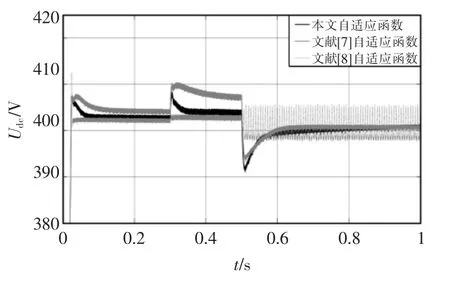
图11 本文与文献[7]和文献[8]自适应函数控制效果对比Fig.11 Comparison of the control effect of adaptive function proposed in literature[7] and literature[8] and this paper
4 结语
针对固定参数VDCM 控制动态响应和阻尼惯性支撑的矛盾,提出一种J,D 自适应VDCM 控制策略。该自适应函数简单,不确定参数少。通过与固定参数和其他自适应VDCM 进行仿真对比,可得在母线电压超调量基本不变的情况下,恢复至稳态的时间明显缩短。 研究表明所提自适应策略可通过动态调节惯性和阻尼系数,使系统在具备惯性和阻尼支撑的同时具备良好的动态性能。
猜你喜欢
大电机技术(2022年5期)2022-11-17
遗传(2022年9期)2022-10-10
大电机技术(2022年3期)2022-08-06
汽车实用技术(2022年12期)2022-07-05
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
电子制作(2019年23期)2019-02-23
电子制作(2017年1期)2017-05-17
金融发展研究(2016年11期)2017-01-12
演艺科技(2016年11期)2016-12-24
