基于机器视觉的夜间位移检测算法研究①
2022-08-23 12:12储紫微汪晨灿
佳木斯大学学报(自然科学版) 2022年4期
宋 陈, 储紫微, 汪晨灿
(安徽理工大学机械工程学院,安徽 淮南 232000)
0 引 言
视觉测量方法是近年来逐步发展成熟的一种非接触光学测量法,能够通过图像采集的方式,无损、快速、准确地获得被测对象的全场应变和位移信息[1]。通过对目标的实时检测,我们可以更加高效的提取出图片或视频中的有效信息。尽管在过去十年目标追踪取得了重大进展[2-4],但由于光照,环境,设备精度等问题追踪位移检测技术依旧是一个具有很大的挑战性的问题,且追踪算法需兼具有较强的时间与空间鲁棒性。在进行夜间物体位移检测中,由于可见光不足,传统成像设备无法输出有效图像,本文中选择型号为3200_1080p工业红外摄像装备以及红外补光灯作为物体图像采集设备。基于相关滤波的跟踪算法的实时性表现非常稳定因此其成为目标检测与跟踪研究领域的研究热点[5]。Bolme 等[4]人提出 MOSSE跟踪算法,首次将相关滤波应用于目标追踪,可适应复杂环境下的目标追踪,但其精度不高。Henriques 等[6]人提出了 CSK算法,该算法采用分类器进一步提高核相关滤波的检测精度,随后于2015年提出KCF跟踪算法[7],KCF追踪器能够准确追踪标记物体并实时输出标记物体坐标在追踪过程中保持图像平滑以避免丢失帧。KCF追踪器可以适应的成像设备的帧率范围更加广泛。采用改进后的追踪算法将运动物体的识别、追踪与位移计算相结合,设计基于机器视觉的物体实时位移监测系统。通过对KCF追踪器进行研究,建立低亮度位移检测系统;利用形态学腐蚀、膨胀、二值化等多种图像处理方法对图像干扰信号进行过滤处理;通过相似算法对标签位移进行实时测量并输出实际位移,并在多种干扰条件下进行实验,实现在夜间环境下位移检测要求。
1 基于视觉的物体识别追踪
随着近年来计算机视觉技术的快速发展和数据样本量的大量扩充,以深度学习为代表的人工智能算法越来越多地应用在图像识别领域[8]。卷积神经网络是实现深度学习的一项重要技术,已在图像识别领域取得了良好效果[9]。通过算法来进行定位捕捉成功率不能达到精度要求,针对此问题使用合适算法同时对于标签相应做了一系列参数标定,用以提高捕捉准确率。由于低光照强度下的特殊环境,不同颜色以及材料对标签捕捉的精度有很大影响,在经过实验对比后选择采用黑色颗粒标签,其反射红外线的能力较强,成像效果最佳并对其进行图像增强处理[10]。RGB值在通过红外摄像反馈后比较稳定,受环境影响较小。具体捕捉方法可分为三个步骤;
1)对目标图像以左上角为原点建立坐标,对坐标正方向进行切割,裁切后图像保留标签所在有效区域,防止物体边缘对识别的干扰。对裁切后的图像精选灰度转化然后进行高斯模糊。如图2(a)-(b)。
2)然后对标签进行腐蚀膨胀处理排除标签周围杂物对标签的干扰,经过多次试验得出腐蚀2次膨胀3次对标签原始参数影响最小,可以有效地消除噪声分割出独立的图像元素。如图2(c)-(d)。

(a)灰度转换 (b)高斯模糊 (c)腐蚀 (d)膨胀
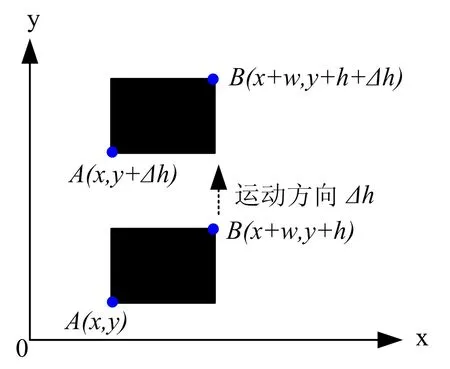
图2 标签的初始坐标及运动坐标
3)在新坐标范围内进行RGB阈值识别,设置RGB全局阈值T,图像中所有像素点统一使用同一个固定阈值。式(1)中f(x,y)为图像RGB值,g(x,y)为处理后的灰度值,使用一维Means方法设置二值化阈值:
(1)
由于低光照强度条件下,设备位置以及非自然光的影响RGB变化范围较大,经过试验测试,采用的标签在RGB值在小于10LX光照强度下数值范围为0至10,针对标签参数设定阈值范围如表1所示。
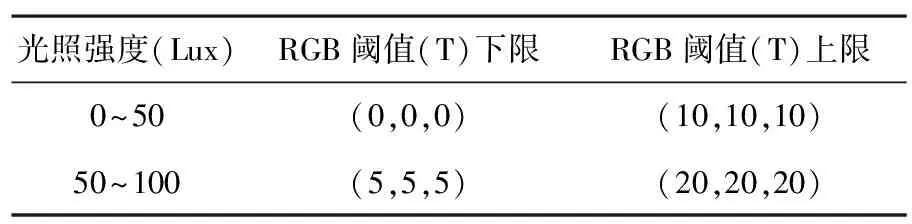
表1 不同光照条件下的颜色阈值
2 夜间物体位移测量系统
2.1 KCF追踪器原理
基于相关滤波器(Correlation Filters, CF)优化的追踪器[11]因其良好的时间鲁棒性而备受关注,这一类追踪器通过在傅立叶频域中求解相关岭回归问题来表征目标框与其追踪目标在相对空间上的关联性。追踪器KCF(KernelCorrelation Filter)核相关滤波算法[12]是基于CF优化后的追踪器,性能更加强大、可靠性更强。相关滤波算法算特点是判别式跟踪,通过核相关滤波器利用数据集对判别器进行训练,自主判断跟踪到的是否为实际标签或是周围的背景黑色信号。通过轮转矩阵对数据进行采集,使用快速傅里叶变化对算法进行加速计算。
KCF追踪器,首先在初始帧中通过HOG检测得到原始图像,内嵌循环矩阵对样本进行处理,得到足量数据集即虚拟样本,通过虚拟样本进行训练分类。KCF追踪器中利用循环矩阵高速输出虚拟样本。通过对比两幅图像的相关性以及大量的样本学习得到标准模型,表现形式为数字信号处理中的冲激响应,以下一帧图像作为输入信息,寻找输出中相关性最突出的点即为最相似的点,标记为新目标并记录其坐标信息。计算ft和相关矩阵Kft:
Kft=
(2)


(3)

ft=(1-β)ft-1+βft
(4)
αt=(1-β)αt-1+βαt
(5)
式(4),(5)中,β表示学习率,ft-1表示第t-1帧的目标特征向量,αt-1表示第t-1帧的核相关滤波器系数。
2.2 位移处理
为完成物体的识别与捕捉,首先对图像边界进行定义并输出其相应坐标,具体定义A,B角点坐标A(x,y),B(x+w,y+h),如图3所示。将定义的标签参数作为整体重新定义为标签新坐标,便于后续实际位移的计算。完成标签参数定义后选择其中心点作为追踪器追踪目标,提高容错率。在单次测量中定义坐标与实际长度对应比例不变,利用算法将追踪器得到的坐标变化输出为物体实际位移。

图3 捕捉画框结果
在原始图像在进行二值化处理后对数值为1区域进行标记腐蚀膨胀后保留的区域进行边缘检测,寻找第一帧标签的边界,识别完成后对捕捉部分进行画框标记,如图4所示为标签画框标记结果。

图4 干扰项位置
实际位移距离计算公式为式(6):
l1h=lh1
(6)
式(6)中l1为标签的坐标位移;h为标签实际长度,为定值90mm;l标签实际位移;h1为标签在红外图像的坐标长度。
HH1=H1h
(7)
式(7)中H为标定物体实际长度;H1为物体在红外图像上的坐标长度。
L1h1=LH
(8)
式(8)中L1为物体的实际位移;L为物体的坐标位移。
经过数学处理得到最终输出数值即物体实际位移L1。由式(5),(6),(7)可知H,H1为中间量,不影响实际结果输出,所以在实际应用中不需要考虑被测物体的尺寸大小。
3 实验验证
采用的软件环境为:Windows10 + Anaconda-3+ OpenCV2,硬件环境为红外摄像头+红外补光灯+投影幕布,搭建的实验平台以幕布为移动设备,标签固定在幕布特定位置,测量幕布底端的移动距离。为了验证方案可行性,在实验移动设备幕布上增加不同颜色及大小的干扰项,在幕布不同位置如幕布左下方和右下方增加与标签尺寸及RGB值相同的干扰。如图5所示。
为了验证本方案的可靠性分别对距离2m-5m及高度0.5m,1m,1.5m,2m做了三次重复性实验。如表2为夜间物体位移1m位移测量平均误差。
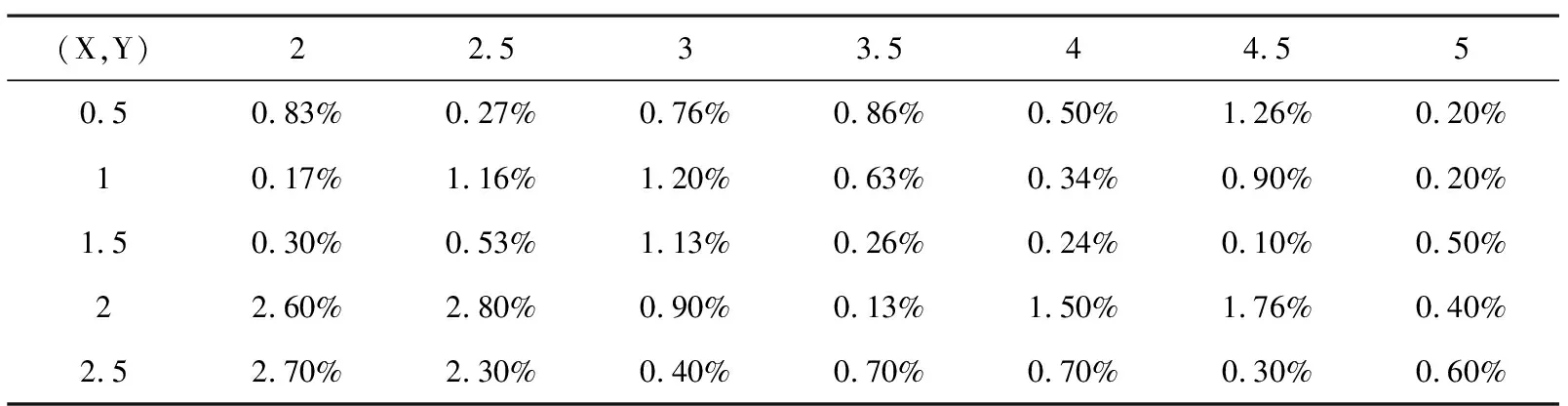
表2 夜晚物体位移1m位移测量平均误差
实验结果表明,本目标追踪位移检测算法兼具了时间和空间鲁棒性的均衡,误差较小,有一定的应用价值。由表可知误差最小为0.1%是在距离4.5m高度1.5m位置。最大误差为2.8%在距离2m高度1m位置。因此在实际应用中红外相机位置应安装在与标签位置水平距离4.5m,垂直高度1.5m处最佳。
4 结 语
针对光照强度小于10LX环境下利用KCF追踪器对物体进行实时追踪并对其位移进行监测基于单目红外相机提出了一种物体追踪直线位移监测系统。利用单目红外摄像头完成图像收集,通对第一帧图像进行画面切割减小识别范围之后利用红外图像中设定阈值对标签进行捕捉;其次利用KCF核相关滤波器进行物体追踪,然后对现有的追踪器算法进行改进并融合位移数据处理模型形成完整的物体位移追踪监测系统并进行相应的重复性实验。利用此算法对位移的输出不依赖于摄像机位置与物体位置的几何关系,计算过程更加简洁,进一步简化算法提高效率。本方案识别速度快误差较小,基本满足夜间位移测量需求,有一定的应用前景。
猜你喜欢
小学生作文·小学低年级适用(2022年2期)2022-07-07
环球时报(2022-05-23)2022-05-23
航天返回与遥感(2022年1期)2022-03-09
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
计算机应用文摘·触控(2021年17期)2021-10-21
小星星·阅读100分(低年级)(2021年8期)2021-08-27
金桥(2021年4期)2021-05-21
智能计算机与应用(2020年4期)2020-08-31