城市轨道交通智能监测技术应用
2022-08-20 06:42牟晋勇范赛男韩志军中建八局第二建设有限公司山东济南250000
中国房地产业 2022年24期
文/牟晋勇、范赛男、韩志军 中建八局第二建设有限公司 山东济南 250000
引言:
轨道交通智能监测技术是针对于城市轨道交通地铁隧道位移监测的一项安全保障技术。城市轨道交通地铁隧道周边环境复杂,地铁隧道受周边建筑施工、土壤扰动、自然灾害等因素影响较多,一旦发生隧道位移极易引发重大安全事故。传统城市轨道交通监测依靠专业人员进行仪器测量,误差大,操作人员进入隧道安全隐患问题较多,数据传输及分析较慢,不能第一时间反馈数据。轨道交通智能监测技术采用智能监测机器人,自动定时数据采集分析,及时预警,精度高,相比传统监测优势明显。
1、某城市轨道交通概述
本次研究以某城市轨道交通3 号线为例,线路长度约21.6km,共设站13 座。其中一处车站与拟建工程基坑开挖线距盾构区间结构最小水平净距约为19.03m(基坑围护结构外边缘距盾构区间结构最小水平净距约为17.43m),与区间风井结构最小水平净距约35.04m(基坑围护结构外边缘距区间风井结构最小水平净距约为33.24m)。基坑开挖及支护结构对轨道交通内隧道位移影响较大。
2、轨道交通智能监测技术应用
2.1 技术概况
轨道交通测量机器人自动监测技术是基于测量机器人组建的自动化监测系统可以对隧道进行变形观测,包括道床的竖向(水平)观测、拱顶的竖向(水平)观测、隧道相对收敛、变形缝差异性沉降观测以及隧道与风井接缝位置变形观测。
2.2 关键技术实施
2.2.1 自动化监测系统的构成
自动变形监测系统主要由数据采集系统、数据传输系统、数据处理系统、数据分析和数据管理系统等五部分组成。根据某工程轨道交通专项变形监测实际情况采用索佳NET05 高精度测量机器人+固定监测棱镜的方法进行监测。因本项目是在济南轨道交通三号线运营过程中实施监测,为避免监测过程中全站仪、棱镜的反光给铁路机车司机造成干扰,本项目所用的索佳NET05 高精度测量机器人在使用过程中关闭激光红外线;监测棱镜采用微型棱镜,对洞内机车光照不产生反光影响。
2.2.2 数据采集系统的安装
测量机器人的安装平台:选用50mm*50mm、厚度为5mm 的不锈钢制作两块支撑骨架,制作规格为:竖支撑长度为0.4m,在其距两端各5cm 处钻取直径为10mm 的小孔,横支撑长度为0.4m,斜支撑长度为0.6m,两端制作成45°角。两块支撑骨架间距为0.4m。再加工一块尺寸为0.4m*0.4m 的不锈钢板,在钢板中心处钻取直径为20mm 的小孔,便于安装连接测量机器人。再采用焊接方式将斜支撑及横支撑焊接在一起(两支撑焊接后形成45°夹角),在两横支撑之间水平放置已加工好的不锈钢板再焊接牢固。制作完成后将竖支撑采用10mm 的螺丝固定在隧道侧壁上,这样就制作了可以放置测量机器人的倒三角平台。测量机器人大致为方形,规格为0.3m*0.3m*0.4m。测量机器人的安装平台示意图如图1:

图1
测量机器人安装前,仔细检查平面基准点埋设情况、强制对中基座的水平程度,不符合要求的进行改造或者重造。安装时要求测量机器人严格整平,测量机器人安装完成后应及时量取并记录设备高信息。量测设备高时测量机器人安装是否牢固、稳当。并对另一台测量机器人、检校点处的2 个方向的棱镜读数,每次量测试读数三次,取平均值记录。
2.2.3 数据传输系统的安装
由于隧道内已有4G 网络,可采用基于GPRS/CDM A 的无线数据终端(DTU)进行数据传输。数据通信传输系统包括自动化安全监测区段的基准点和监测点的4G流量传输。本项目主要采用4G/CDMA 等无线通讯方式。根据现场情况、监测点自身的特点我们综合考虑后采用无线GPRS 作为本项目的通讯方案。整个系统的监测数据采用无线GPRS 进行传导到控制中心,该系统中2 个测量机器人站点都必须各自独立采用无线GPRS进行传导。具体实现方法如下图2:
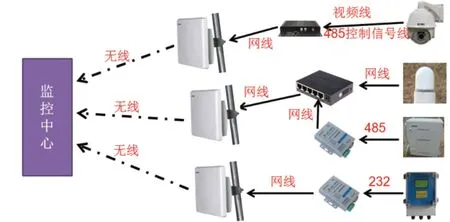
图2
无线GPRS 通讯安装及架设要求:由于测量机器人安装在区间隧道内不存在避雷措施的安装埋设;必须固定在设备保护箱内做好防水处理;必须保证能接收到手机信号;不要把天线固定在设备保护箱内,应固定在设备保护箱外。完成设备的安装。无线GPRS 模块与天线间的线缆。天线与无线GPRS 模块的线缆通常称为馈线。长度一般要求不超过1m 但不短于20cm,其质量和长度对无线信号的影响很大。
无线GPRS 的施工:(1)安装流程:组装设备-安装固定产品的设备保护箱-设备天线的安装-接地-连接线缆-给设备供应电源-调试设备正常工作。(2)产品的组装:在此组装过程要求要把馈线与设备之间的螺丝旋扭旋紧,避免引起设备与天线之间螺丝松动致使设备脱落,造成设备损坏或是不能实现无线的接入。(3)设备的安装:我们将首先对GPRS 模块摆放的位置进行选择,先做假安装画好设备的安装图,在设备保护箱内进行取点打孔,然后用螺丝进行固定,注意螺丝上应用胶圈进行隔离防止静电,对设备的干扰然后通过馈线与GPRS 天线连接。(4)接地:无线设备在安装的时候要严格处理接地。(5)给设备供电:所有的线缆连接完成后可以给设备供电。此时只须将POE 电源模块的电源插在电源接接线板上。(6)调试设备运行工作。
2.2.4 数据处理分析与管理
本项目拟采用岩石科技RocMoS 自动化安全监测软件,它主要包括以下三部分内容:一是监测信息管理系统,二是监测数据综合分析系统,三是监测信息反馈系统。
信息管理系统主要包括数据录入和监测资料的管理,将工程自建设以来的不同部位所有自动采集、人工观测资料、规程规范、图纸、技术报告、各种报表及工程档案等纳入本系统进行统一管理。
监测数据综合分析系统主要包括信息可视化系统、图形报表生成、信息查询及监测成果报警功能等,满足一般数据的计算分析、报表制作、曲线绘制、查询等。
监测信息反馈系统主要包括数据在线快速安全评估和采集馈控两部分。快速安全评估是指一次采集完成后,利用该次实测数据对监测结构体的安全状况作一个简便、快速的评估,为监测管理人员提供一个启示性的信息,引起他们的重视,进而开展更详细的安全分析和评估工作。采集馈控作用于采集工作,对自动和人工采集的数据进行实时检查分析,若有可疑测点,则反馈错误信息到数据采集信息管理系统,让管理人员能做出相关干涉,排除错误信息,重新复测等。
通过外业自动采集数据,软件根据接收数据进行实时处理分析,得出各测点三维坐标,得出各测点变形情况。通过对测点数据处理得出相应监测点点位分布图,通过软件数据处理,实时浏览监测数据,计算各测点的三维坐标变化量,并可计算处各监测项目的变化量。(图3)
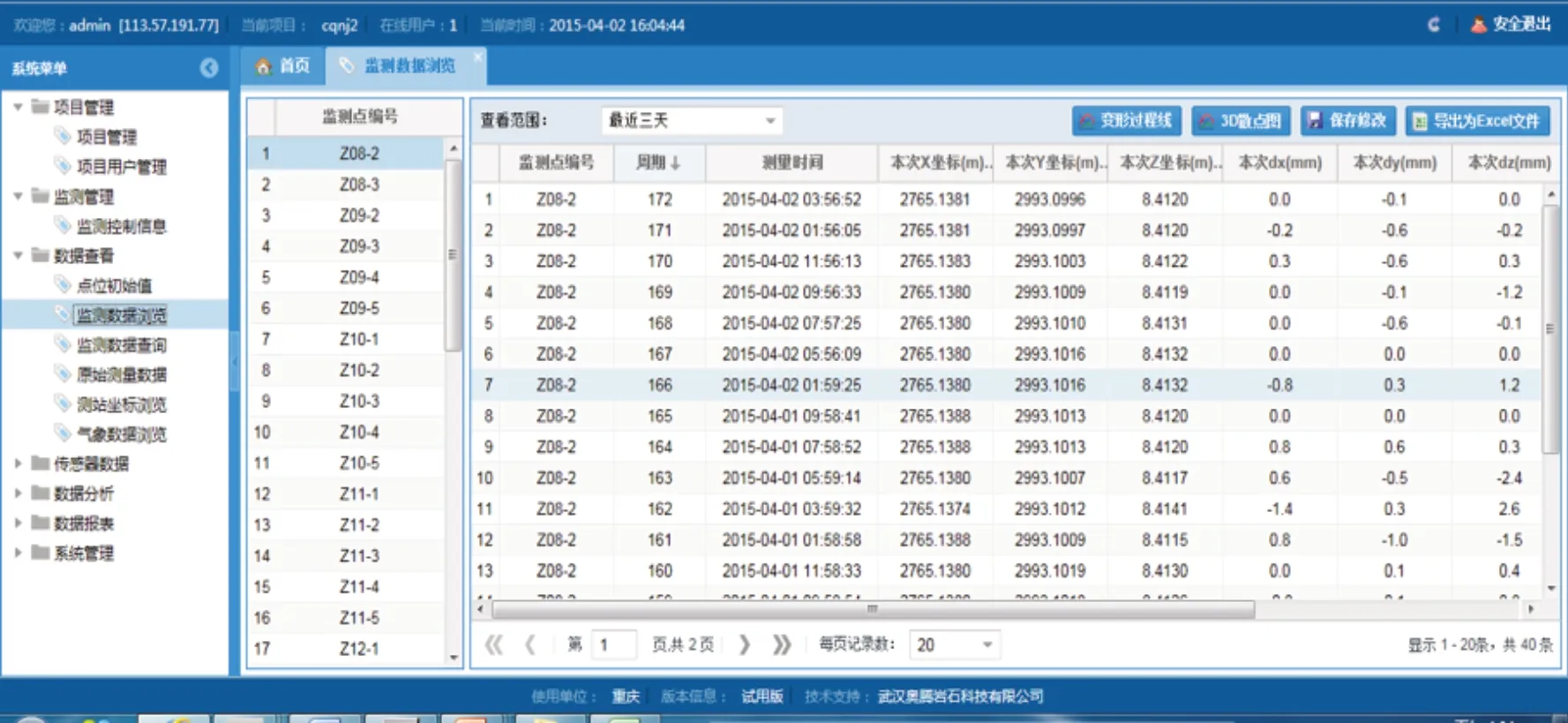
图3
通过监测数据自动计算变形量,软件自动绘制变形曲线图。(图4)

图4
根据需求,绘制日报表、周报表测点变形曲线图。(图5、6)
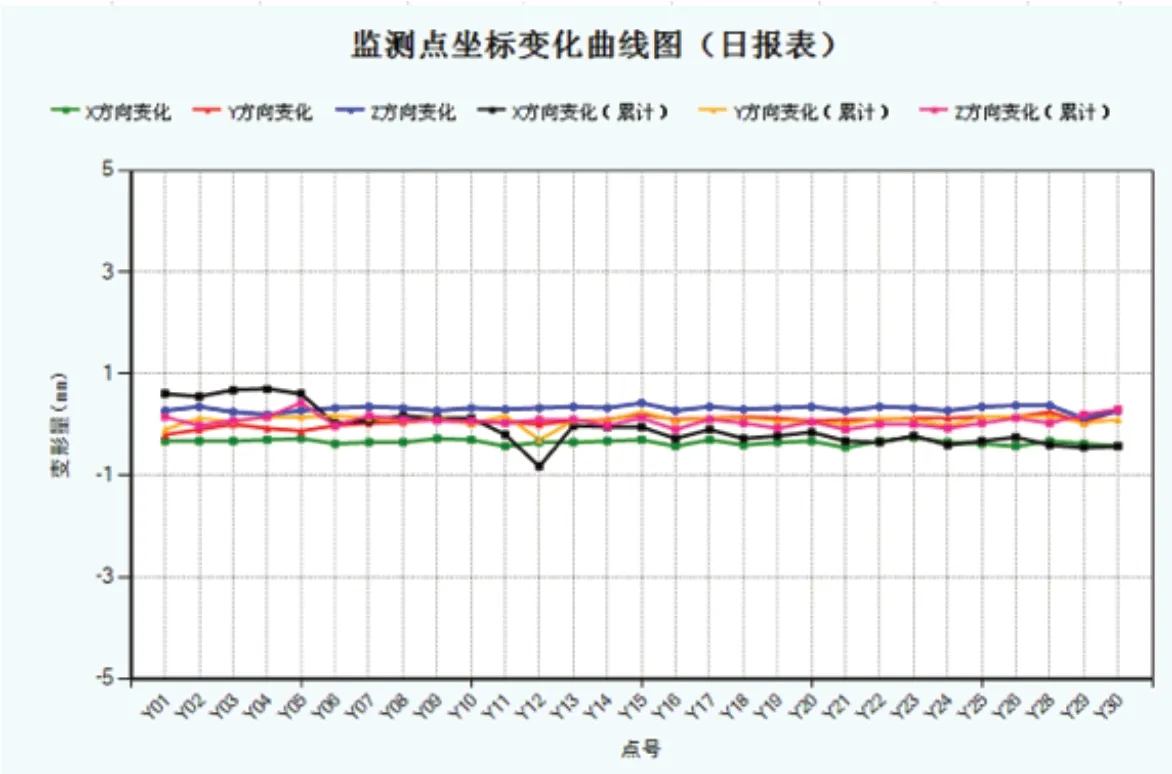
图5
结语:
城市轨道交通智能监测技术通过轨道交通测量机器人自动监测,对轨道交通隧道位移实现数据实时采集汇总分析,通过监测点曲线图对隧道位移进行把控,第一时间掌握周边建筑施工过程中对轨道交通隧道的影响,节约了人力,提高了数据采集准确度和数据分析及时性,确保了轨道交通运营安全。
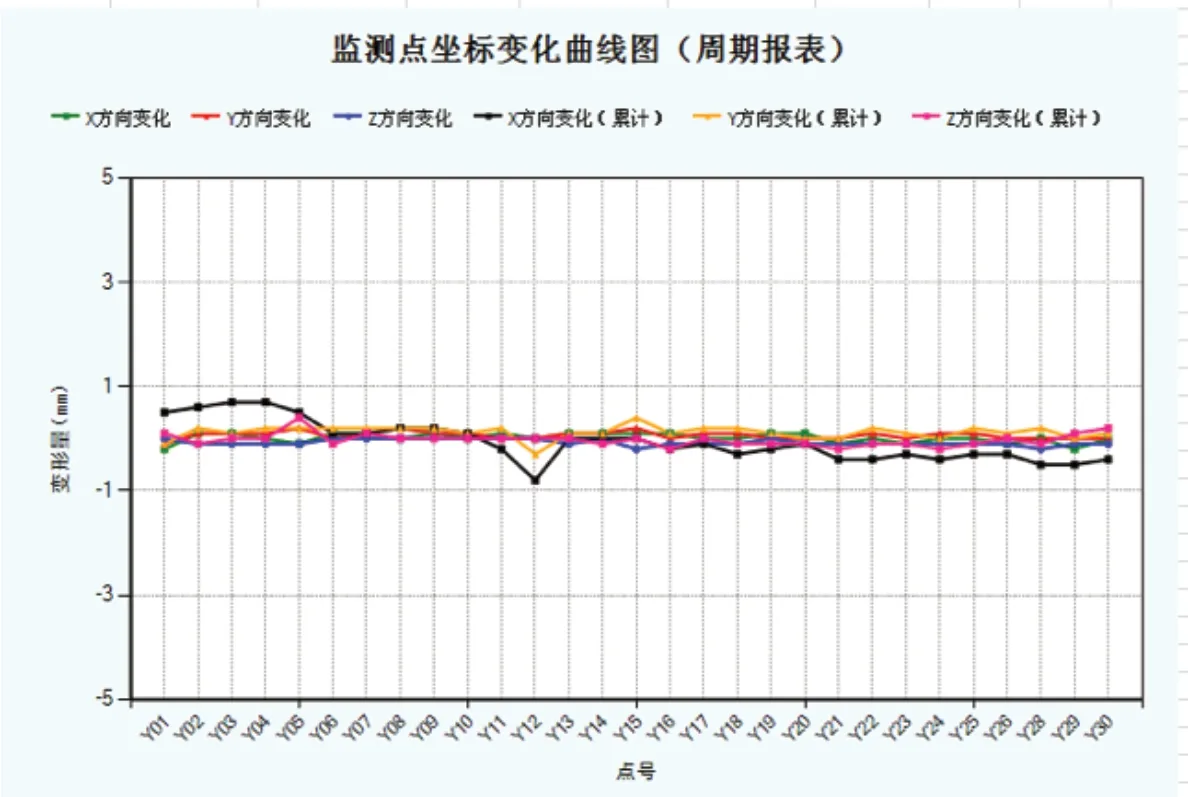
图6
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
电子乐园·下旬刊(2022年6期)2022-05-16
城市轨道交通研究(2022年4期)2022-04-16
制造技术与机床(2022年2期)2022-02-22
城市轨道交通研究(2022年1期)2022-02-18
有色金属(矿山部分)(2021年4期)2021-08-30
汽车实用技术(2021年10期)2021-06-04
天津城建大学学报(2020年4期)2020-09-10
科技传播(2019年22期)2020-01-14
消费导刊(2018年10期)2018-08-20