
“特斯拉刹车失灵”事件的车辆运动模型与分析1)
2022-08-19 11:37王宇帆陈盟靖周吕文
力学与实践 2022年4期
王宇帆 陈盟靖 周吕文
(宁波大学机械工程与力学学院智能材料与先进结构实验室,浙江宁波 315211)
之前,“特斯拉刹车失灵”事件引发社会热议。根据车主介绍,事发前她与家人驾驶特斯拉Model 3出门,驾驶者远观到红绿灯后,很自然地把脚从电门上抬了起来,但是汽车并没有降速,反而以很快的速度追尾了前方多个车辆,最后撞在路边的水泥防护栏才强行停止。
事后,特斯拉公开了该起交通事故发生前一分钟的行车数据,该数据包括车速、方向盘转向角、制动主缸压力等信息。同时,特斯拉还为该数据作出了一份文字说明:在驾驶员最后一次踩下制动踏板时,数据显示,车辆时速为118.5 km/h。在驾驶员踩下制动踏板后的2.7 s内,最大制动主缸压力仅为4.59 MPa,之后驾驶员加大踩下制动踏板的幅度,制动主缸压力达到了9.27 MPa,紧接着前撞预警及自动紧急制动功能启动(最大制动主缸压力达到了14.07 MPa)并发挥了作用,减轻了碰撞的幅度,制动防抱死系统(anti-lock braking system,ABS,是一种具有防滑、防锁死等优点的汽车安全控制系统)作用之后的1.8 s,系统记录了碰撞的发生。驾驶员踩下制动踏板后,车速持续降低,发生碰撞前,车速降至48.5 km/h。根据数据和特斯拉提供的说明,可以将制动过程分为开始制动、ABS工作和自动紧急制动(autonomous emergency braking,AEB)三个阶段,具体如图1所示。
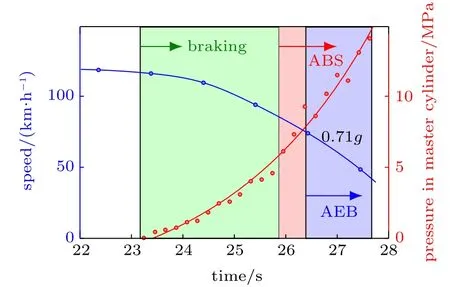
图1 制动过程的分阶段图Fig.1 Phased diagram of the braking process
此外,特斯拉表示事故发生前30 min内,刹车记录超过40 次,同时车速有多次超过100 km/h的记录和多次刹停的情况发生。张女士认为这些数据并不是她所要求的车辆原始数据,并且否认了事故当天存在超速驾驶的行为。
很多网友认为特斯拉有修改数据的嫌疑。事故发生于两个相距500 m的红绿灯之间,红绿灯监控摄像头没有启用。事发时天色较暗,国道两侧没有路灯,也没有监控摄像头。所以特斯拉单方面提供的数据并没有得到印证。如果假定特斯拉提供的数据是可信的,那么能否根据该数据还原出事故发生前的行车状态和轨迹呢?本文将建立车辆运动方程,根据车辆前轮转向和车速,确定出车辆的运动状态和轨迹。在此基础上对事故的原因进行分析。
1 原理和模型
1.1 车辆转向原理
为了能够根据车速和方向盘转向角随时间的变化还原出事故中车辆的运动状态,需要研究车辆运动与车速和前轮转向角之间的关系。现代汽车使用了一种叫阿克曼转向的技术(图2)[1-2]。在该技术出现前,车辆(如马车)转向主要使用单铰链转向技术,单铰链转向也能使内外转向路径指向同一个圆心,但存在很多缺点。阿克曼转向技术能有效避免单铰链转向的缺点。车辆转向时让内侧轮胎转弯半径小于外侧轮胎。使四个车轮路径的圆心大致上交会于后轴延长线上的瞬时转向中心,进而实现顺畅地转向。
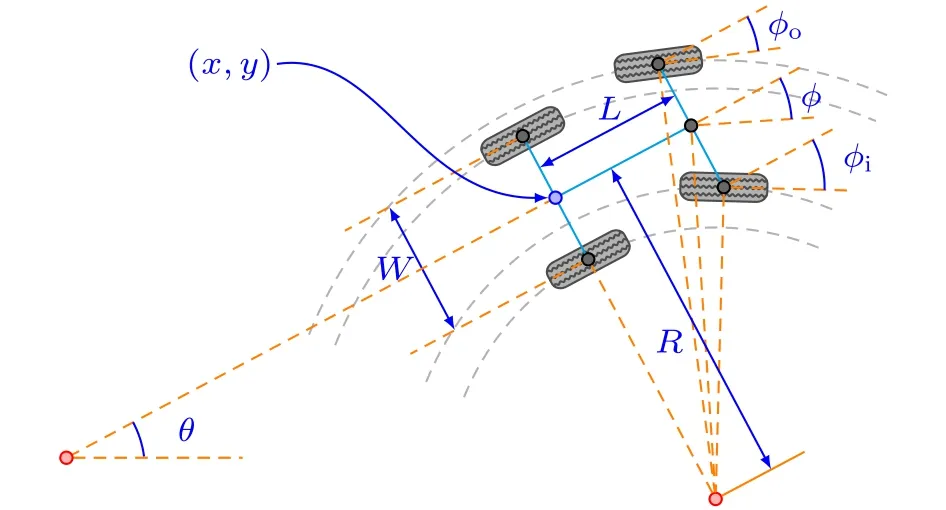
图2 车辆运动模型示意图Fig.2 Schematic of vehicle motion model
为了说明图2 所示的阿克曼转向几何原理并得到阿克曼转向公式,令轴距(前轴中点到后轴中点的距离)为L,轴长为W,内外侧前轮转向角分别为φi和φo,车辆中心线到瞬时转向中心的距离为R。则有

其中φ为假想位于前轴中点的车轮应有的转向角,将式(1)中的 t a nφi和 t a nφo取倒数并作差,便可得到阿克曼转向公式

1.2 车辆运动模型
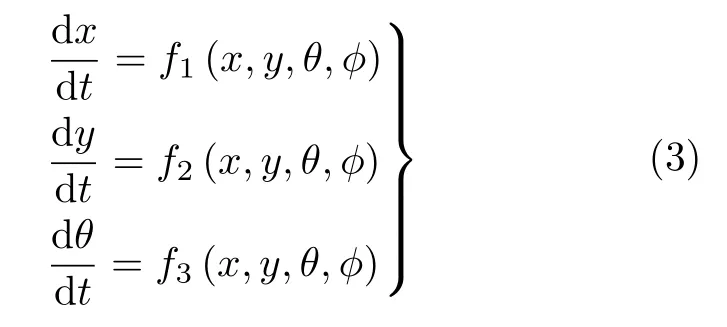
如图2所示,车辆的状态可以由(x,y,θ,φ)来描述。其中(x, y)表示车辆后轴中点位置,θ表示车身朝向,φ表示前轮转向角。要根据前轮转向φ和车速(后轴中点的速度)v获取车辆运动状态,实际上就是确定一组微分方程
在图2 所示的瞬间,后轴中点的瞬时运动方向是垂直于到瞬时转动中心方向的,因此

接下来确定车辆朝向的转动速度 dθ/dt,用s表示车辆行驶的距离(速度对时间的积分),则有 ds=Rdθ。根据阿克曼转向几何原理可知R=L/tanφ,因此有

由此,本文得到了描述车辆运动的三个微分方程

其中v为车速,L为轴距,φ为前轮转向角。
2 验证和模拟
上文建立的车辆运动方程表明,只要给出车辆控制参数(前轮转向角和车速)关于时间的函数,就能通过数值积分还原出车辆的行驶状态和轨迹。随时间变化的控制参数是由驾驶员控制的:前轮转向角由方向盘控制,车速由油门和刹车控制。在还原特斯拉事故的行车轨迹之前,本文先将模型应用到泊车情况,并以此对模型进行测试。
2.1 泊车验证
图3是人为设置的一个泊车场景,驾驶员需要通过控制车辆前轮转向角和车速,将车从左下角位置移动到右边的停车位中,并且使车头朝外。
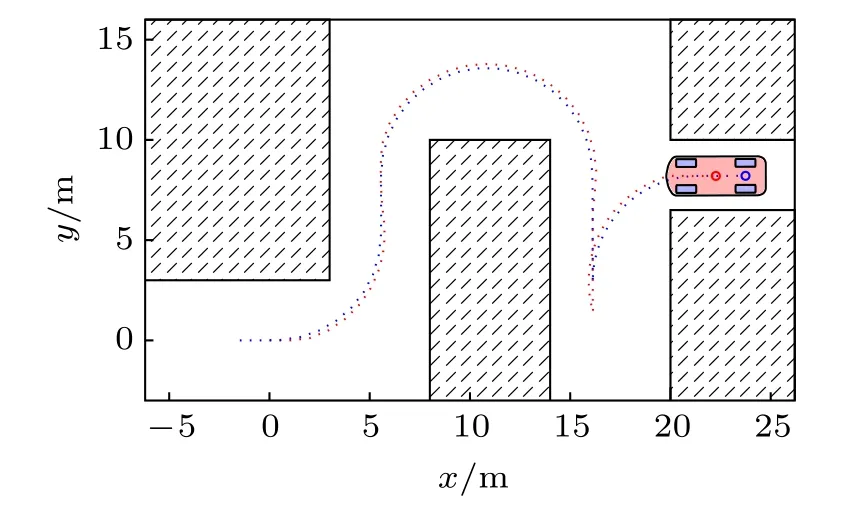
图3 泊车测试车辆轨迹图Fig.3 Vehicle trajectory of parking simulation test
使用如图4的控制参数(前轮转向角和车速),代入运动方程就可以以图3中的轨迹完成泊车。通过图3中车辆中心(红)和后轴中点(蓝)的轨迹,可以发现:车轮在转弯时,两点的轨迹并不重合,红点轨迹的曲率半径总是略大于蓝点。这与阿克曼转向几何原理是一致的,同时也验证了模型的可靠性。

图4 泊车测试对应的控制参数Fig.4 Control parameters of parking simulation test
2.2 特斯拉行车轨迹模拟与事故还原
要应用上述车辆运动方程来还原事故发生时的车辆行驶状态和轨迹,首先需要知道车辆和道路的信息。涉事车辆为特斯拉Model 3,其尺寸参数为[3]:轴距L=2.87 m,车长4.7 m,车宽W=1.85m。方向盘与前轮转向角的传动比为10:1,即方向盘每转动10°,前轮转动 1°[4]。图5是事发路段和位置,事故发生在胶海线与铁东路交叉的红绿灯路口前,事发路段几乎是一条笔直的公路,公路宽约10 m,该路段与东西方向的夹角约为5.4°。因此车辆的初始朝向可假设为θ0= 5.4° 。

图5 特斯拉事故事发路段和位置Fig.5 Location and road section of the Tesla accident
此外,还需要知道事发时间段内的控制参数信息(车速和方向盘转向角)。由于特斯拉给出的数据采集频率较低,本文对碰撞前6.3 s内的方向盘转向角和车速数据进行了添加和插值(其中方向盘转向角的人为添加数据点由原始数据的延伸线相交得到),从而得到了方向盘转向角fφ(t)和车速fv(t) ,结果如图6所示。

图6 对特斯拉公布的数据插值结果Fig.6 Interpolation results of data provided by Tesla
图7是通过模型还原出来的事发前的行车状态和轨迹。简单分析可以看出:事发前,车辆沿右侧车道行驶,当司机看到远处红绿灯后,开始刹车减速。但由于制动效果未能达到司机的期望,随后司机为避让前方障碍而猛打方向盘撞在了路边的水泥防护栏上。
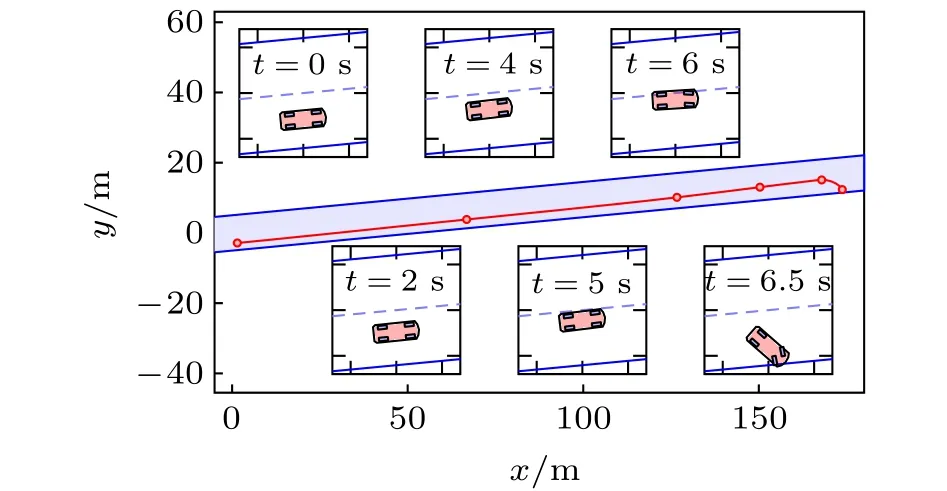
图7 由特斯拉公布数据还原的车辆轨迹Fig.7 Vehicle trajectory restored by data provided by Tesla
3 事故分析
根据特斯拉提供的数据还原出的车辆行驶状态和轨迹,与车主张女士对事故的定性描述并不矛盾,因此本文认为特斯拉提供的数据基本可信。车主张女士和广大网友对特斯拉的质疑主要有:对特斯拉车速数据的质疑、对是否可能超速行驶的质疑、对制动系统能力的质疑。下面分析一下这三点(注意:以下分析主要参考和引述了文献[5]中的分析)。
3.1 车速数据的真实性
作为现代智能汽车,特斯拉的每个车轮都配有独立的轮速传感器,轮速传感器技术已相当成熟,失效率很低。为防止整车控制器因轮速传感器失效而获取到错误的数据,四个轮速传感器采集的车速会进行交叉核验,以确保数据的真实性。四个轮速传感器同时失效的可能性几乎为零。因此,除非特斯拉恶意地篡改数据,否则数据的真实性不太可能有问题。但是这也不代表特斯拉提供的数据完全没有问题,从公布的数据看,数据的采样频率确实较低,这也是本文不得不对方向盘转向角和速度做插值的原因。
3.2 是否可能超速行驶
在事故当天是否超速这一问题上,车主表示:路段两个红绿灯仅仅相隔500 m,不会开到118 km/h。那么在不到500 m的距离里,车辆能否从0加速到118 km/h 呢?针对车主的这一质疑,我们计算特斯拉从v0=0 km/h加速到vt=118km/h需要的距离。特斯拉百公里加速时间约为3.5 s,假设加速过程中加速度恒定为a=100/3.5=102.860km/h2,则有

因此,以最大加速度加速的话,可以在70 m内加速至118 km/h。此外,根据式(7)也可以看出,即使以最大加速度的一半加速,也可以在135 m的距离内加速至118 km/h。
3.3 制动系统是否正常
有网友质疑:按特斯拉提供的数据,22.36 s为最高时速118.5 km/h,此时应该松开了电门,车辆在动能回收作用下减速,随后踩刹车,在23.38 s时速降至116 km/h。在动能回收和刹车的共同作用下,车辆一秒多钟只降速2.5 km/h。这种降速,刹车是否起到了作用。
为解决此疑问,本文需要分析车辆1秒降速2.5 km/h 的合理性。一辆轿车以120 km/h 匀速行驶所需的功率一般在15~20 kW之间,考虑到特斯拉Model 3滚阻和风阻较低,取功率P=15kW来计算,即车辆需要15 kW的输入功率才能克服阻力以维持车速。也就是说,在相同的速度下,阻力的功率也是15 kW。特斯拉空车重为1 614 kg,考虑到车上坐了一家人,本文以M= 2 000 kg作为车重。如果动能回收和机械制动完全不起作用,单纯松开踏板,假设在时间dt内,车辆前进了 ds,则阻力的功率可表示为[6]

其中F为阻力,a为减速度。因此,减速度可表示为

代入数据可得a= 0.23m/s2,这样的减速度可以让车辆在1 s 减速0.81 km/h。而实际情况是1 s减速2.5 km/h,说明动能回收或机械制动是起作用的。
既然回收或机械制动是起作用的,那最大制动作用是否足够?根据汽车之家[7]的测试显示,性能正常的特斯拉Model 3的百公里刹车距离约为38 m,因此完美的情况下减速度约为

其中,g=9.8m/s2,表示重力加速度。注意:百公里刹车距离的测试是一开始就将刹车踩到底。那本次事故中的实际减速效果如何?可以通过26.43 s到27.45 s之间的车速计算出车辆的平均减速度

考虑到路面状况、温度、胎压等实际因素,实际减速表现与汽车之家的测试距离有一定的差距,但是这属于正常偏差。
4 结论
本文在阿克曼转向技术的基础上,进行了技术分析、模型构建、泊车验证、真实事件模拟与分析。根据特斯拉提供的数据,本文还原了事发时车辆的运动状态和运动轨迹。模拟结果显示:事发前,涉事车辆沿右侧车道行驶,当司机看到远处红绿灯后,开始刹车减速。但由于制动效果未能达到司机的期望,随后司机为避让前方障碍而猛打方向盘撞在了路边的水泥防护栏上。模型结果与车主对事故的定性描述基本一致,特斯拉提供的数据与车主对事故的定性描述并不矛盾,因此可见数据没有明显虚假的地方。
在此基础上,本文针对车主和网友的三方面质疑(车速数据是否真实、是否可能超速行驶、以及制动系统是否正常)进行了讨论。结果表明特斯拉车速数据基本是可信的,超速行驶的可能是存在的,特斯拉提供的数据表明制动系统是正常工作的。因此,如果特斯拉没有恶意篡改数据,那事故的主要原因可能是车辆超速行驶。
随着中国汽车保有量的增加,交通事故发生的次数也随之上升。而在交通事故的处理中,分析车辆的运动状态和轨迹可以提供很大的帮助。但是由于现实环境的种种限制,很难单纯地依靠监控等图像设备所提供的影像判断,需要借助于车辆上的各种传感器记录的各种数据来辅助分析。车辆运动方程可以应用车辆传感器收集的信息,对交通事故的真实情况进行模拟,对事故发生场地影像缺失的事故分析起到一定的帮助作用。
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
今日农业(2020年16期)2020-12-14
红土地(2019年10期)2019-10-30
小学生学习指导·爆笑校园(2019年6期)2019-09-10
红蜻蜓·低年级(2015年11期)2016-02-02
汽车零部件(2014年5期)2014-11-11
中国自行车·骑行风尚(2014年4期)2014-10-10
清风(2014年10期)2014-09-08
小品文选刊(2009年19期)2009-11-26
对外经贸实务(2009年2期)2009-03-27
