3D 打印光纤光栅环向应变传感器*
2022-08-19 01:01罗广彬洪成雨伟林国琪陈宇瀚
传感技术学报 2022年5期
罗广彬洪成雨*饶 伟林国琪陈宇瀚
(1.深圳大学土木与交通工程学院,广东 深圳518060;2.深圳市地铁地下车站绿色高效智能建造重点实验室,深圳大学,广东 深圳518060;3.深圳大学未来地下城市研究院,广东 深圳518060)
在传统的土木工程试验中可以通过环向应变的监测反映岩土结构的力学性能[1-2],如在三轴压缩试验中需要对土样的环向应变进行测量,得到土体的物理力学性能参数[3-4],获得土的粘聚力和内摩擦角;监测圆柱形各向异性材料的环向应变可计算材料的物理力学性能参数。 在室内土工试验中常用的应变传感器为应变片[5-6],该方法难以测量环向应变,同时抗干扰性较差,实时性较差。
在实际工程中,管道的腐蚀、老化、开裂等问题严重影响管道(尤其是液化气、石油管道等)服役的安全,因此开发监测管道环向应变的传感器迫在眉睫。 传统的管道环向变形监测方法包括人工检测法、红外法、超声波法[7-8],对管道的实时监测仍存在局限性。 环向应变的测量通常可分为直接非接触法和接触法[9]。 接触法是环向变形测量的主流方法,通过使用分布式光纤温度和应变传感器测量管道的环向纯应变值,以确定管道潜在的泄漏位置[10-12],同时可以采用光纤光栅传感器监测材料的横向垂直变形数据和泊松比[13-14]。 而非接触法主要依靠光学干涉实现对环向应变的测量[15]。 近年来,光纤光栅传感器技术得到了迅猛的发展,光纤布拉格光栅(Fiber Bragg Grating,FBG)技术已广泛应用于光纤传感、光纤通信等相关领域[16-19]。 任亮、姜涛等人[10-12]将基于光纤光栅制造的环形应变传感器使用在管道监测中,试验结果表明光纤光栅环向应变传感器能够监测因腐蚀而引起的应变,但是在他们的试验中未对光纤光栅进行封装保护,裸光纤无法应用在环境恶劣的场景下,并且在试验中使用机械式夹具,可能会加剧管道的腐蚀,使监测值大于真实环境导致的腐蚀应变,也无法保证长期作用下夹具能够一直紧贴管道不松驰。 由于FBG 传感器在使用过程中容易被损坏,对FBG 传感器进行封装保护十分重要。 洪成雨等人[20-22]使用3D 打印熔融沉积技术(Fused deposition modelling,FDM)成功设计并制造了FBG 压力传感器,标定试验结果表明结合了熔融沉积技术的FBG 传感器依旧能够灵敏地监测出压力。
本研究采用3D 打印熔融沉积技术将FBG 传感器封装在聚乳酸(Polylactic Acid,PLA)材料中,监测了制造过程中FBG 在PLA 材料熔化以及硬化过程中的信号变化,通过标定试验和室内试验验证了该传感器监测环向应变的可行性。
1 FBG 环向应变传感器
1.1 FBG 传感器原理
光纤光栅是一种智能传感元件,属于波长调制型非线性作用的传感器。 光纤由内层纤芯、中间包层以及外涂覆层组成,其主要组成材料的成分为二氧化硅。 因其是光学传感器,除光纤传感器发射和解调装置外,传感器自身不需要进行电信号传递。
光纤光栅传感器依靠解调仪进行信号采集,解调仪内部包括宽带光源,解调模块等。 宽带光源发出的宽带光射入光纤光栅,与中心反射波长(亦称布拉格波长)相匹配的光被反射回来,其他波长的光透射过去,中心波长与光纤光栅周期满足以下关系:
满足关系式的光将产生有效反射(其中λn为光栅的中心波长,Λ为光栅周期,neff为纤芯折射率),该反射光的峰值波长被称为布拉格波长(又称中心波长)。 图1 为当内层纤芯区域的折射率发生改变时FBG 传感器的示意图。
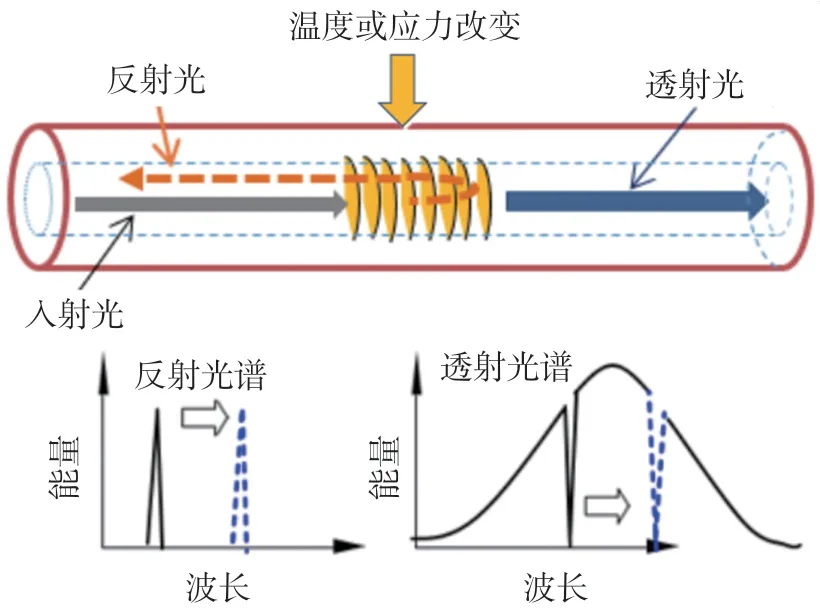
图1 光纤光栅传感器传感原理
应变和温度可直接改变光纤光栅波长,其引起的光纤光栅波长漂移可表示为:

式中:Δε为光纤布拉格光栅轴向应变变化量;ΔT为温度变化量;Pe为有效弹光系数;ξ,α分别为光纤布拉格光栅的热光系数和热膨胀系数。
1.2 FBG 环向应变传感器的设计与制作
本研究设计了一种FBG 环向应变传感器。 该传感器是通过FDM 制作工艺制备而成。 FDM 是一种快速制备各种传感元件的方法,通过将PLA 加热至熔点,然后将PLA(具有柔性材料的基本物理特性)逐层沉积来构建元件。 图2 是一种新型FBG 传感器的设计与制作示意图。 通过CATIA 设计出FBG 环向应变传感器的尺寸为:外径170 mm,内径160 mm,高度10 mm。 在高度为5 mm 位置提前预留出FBG 所需的孔洞。 FBG 环向应变传感器的光栅间距长度为5 mm,铠装跳线左右两侧各为300 mm,总长度为600 mm,包括光纤光栅传感器PLA 应变感应环。 FBG 传感器封装至PLA 应变感应环内部。 使用FDM 技术打印PLA 包装外壳。 在FDM 过程中,当打印完成50%时,将FBG 传感器嵌入PLA 材料中。 重新开始打印,最终使FBG 传感器完全封装在PLA 包装壳中。
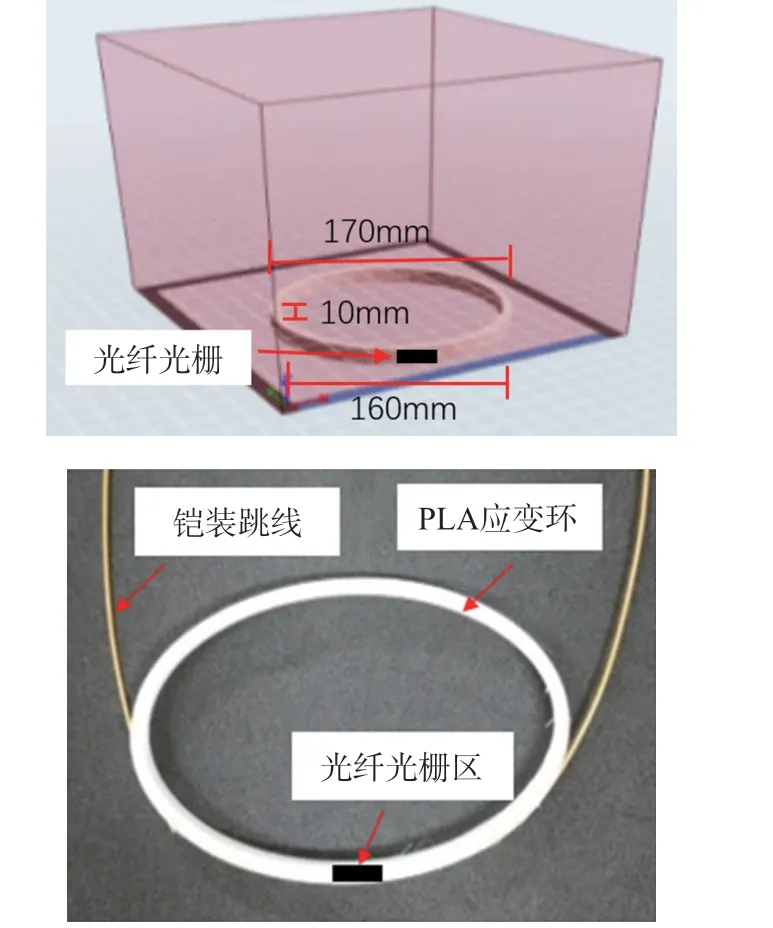
图2 光纤光栅环向应变传感器的设计与制作
图3 所示为环向应变传感器放置在圆柱体上时内部产生压力的受力示意图,传感器半截面的合力为:
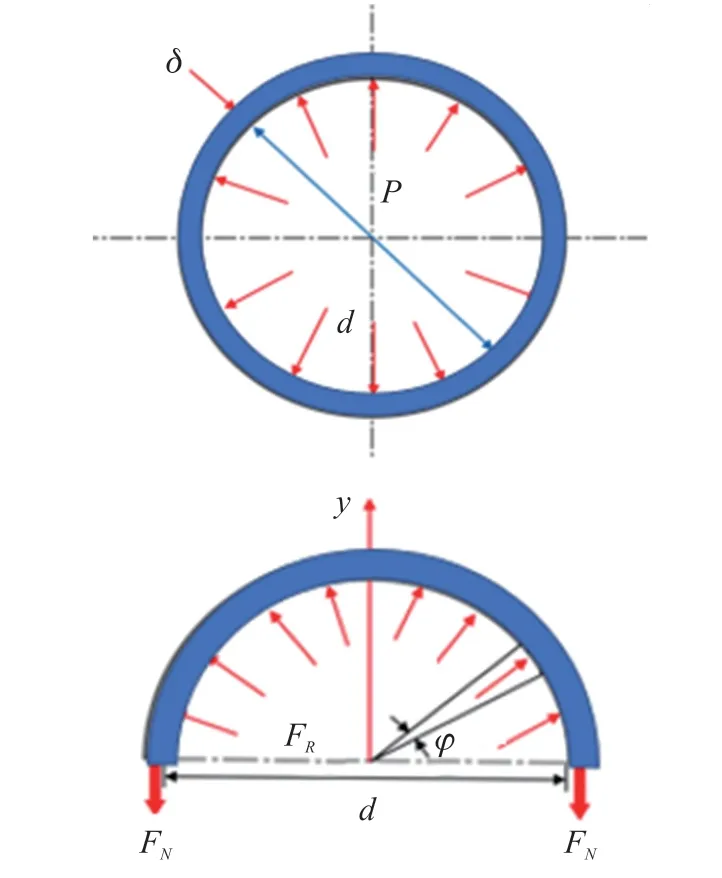
图3 FBG 环向应变传感器在圆柱上的受力示意图

传感器径向截面上的拉力为:
因此:
根据广义虎克定律,环向应变εpe可表示为:
式中:σpe是圆柱体的环向应力,b是圆柱体高度,d是圆柱体内径,δpe是圆柱体壁厚,p是圆柱体内压力,εpe是圆柱体环向应变,Epe是圆柱体的弹性模量。
2 环向应变传感器的打印变形特征研究
由于FBG 环向应变传感器是基于FDM 建模技术进行封装与制作,本部分将介绍传感器的制作细节与封装过程的材料变形特征。 图4 为FBG 传感器从放置到模型上直至打印结束时传感器监测的应变变化,试验中已通过设置温度补偿来消除温度对传感器的影响,因此得到的值为纯应变值。 从图4可以看出应变变化主要分为封装打印和封装结束后2 个过程,迁移过程是初始阶段由于打印中的模型温度较高,所以当传感器刚放置于模型中时受到耗材的高温影响产生拉应变,引起FBG 波长的跃升,导致最大应变值达到约21 με。 后一阶段随着模型打印越来越高,远离了传感器核心,传感器附近的温度开始逐渐降低,产生了收缩应变,FBG 的波长也逐渐减小,在约700 s 时刻,FBG 封装结束时还是处于受拉1 με 的状态。 到了后期FBG 预拉松弛,引起了传感器轻微的波长回升。 封装结束后(FBG 波长波动结束后)残余应变主要是由于PLA 材料的硬化过程,导致变形收缩以及PLA 原型的温度降低导致模型核心材料收缩,进一步引起FBG 传感器的收缩应变,在最终1000 s 时压缩变形为16 με。
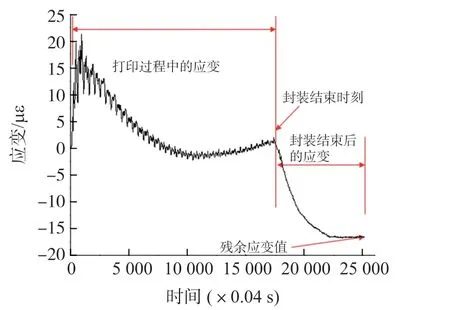
图4 封装耗材在封装过程中的应变曲线
3 标定试验与分析
由于FBG 传感器的波长会随着被测物体应变和温度的改变而发生变化,因此为了避免因温度影响而导致监测数据存在误差较大的情况,并且试验环节所需试验时间较短,本研究采用在恒温条件下进行FBG 环向应变传感器的标定试验。
如图5 为传感器拉伸位移与FBG 所测波长之间的关系,在试验中对FBG 多次拉伸10 mm、20 mm、30 mm、40 mm、50 mm、60 mm,并取多次所测波长的平均值代表其真实波长。 通过对不同拉伸位移的数据进行拟合,我们可以得到波长与拉伸位移之间的关系满足y=0.022x+1540,两组数据之间的线性相关度较好,相关系数为0.99,传感器的拉伸位移与所测传感器的波长呈现正相关的关系,通过试验数据可得:FBG 环向应变传感器的灵敏度为0.022 nm/mm,由于解调仪的精度为0.0025 nm,传感器的分辨率达到了0.114 mm。
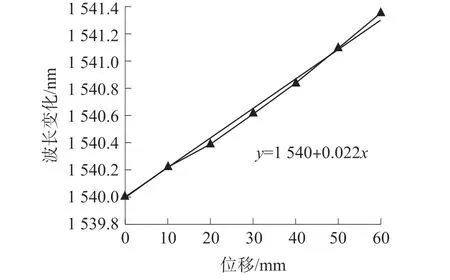
图5 FBG 传感器波长变化与位移的关系曲线
图6 显示了对FBG 环向位移传感器进行拉伸试验时,FBG 环向应变传感器的波长变化与拉伸时间的关系。 传感器的波长发生明显的周期性变化。在不同拉伸位移试验中,最大位移时的波长和初始波长的变化范围基本一致。 光纤光栅传感器拉伸位移为20 mm、40 mm 和60 mm 时的波长变化范围分别为1540.02 nm ~1540.39 nm、1540.03 nm ~1540.82 nm 和1540.00 nm~1541.36 nm。
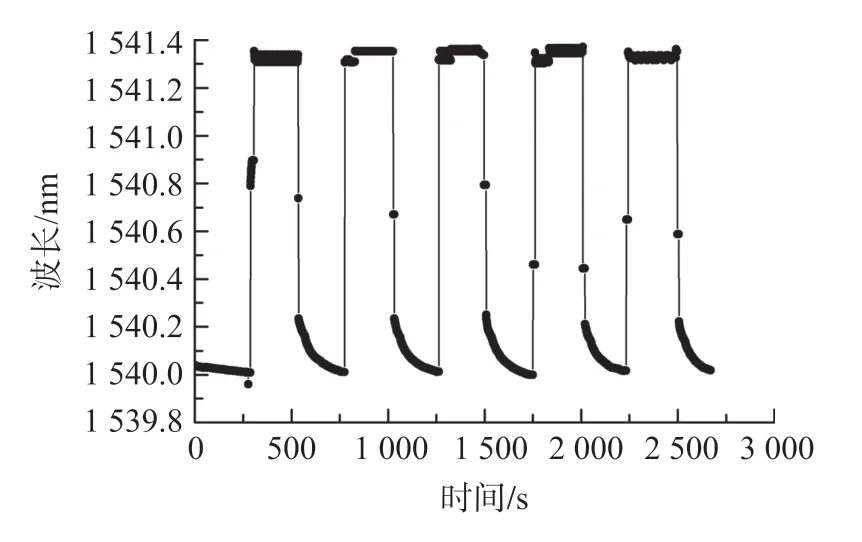
图6 拉伸时波长与时间的关系
图7 总结了校准测试中FBG 传感器相对于位移的波长差。 在拉伸位移为20 mm、40 mm、60 mm时,最大波长差分别为0.013 nm、0.017 nm 和0.015 nm,相对误差分别为3.0%、1.9%、1.2%。 最大波长误差发生在拉伸位移为40 mm 时,达到0.017 nm,最大波长相对误差发生在拉伸位移为20 mm 时,达到3.0%。 通过标定实验误差数据可知该传感器具有良好的监测功能。
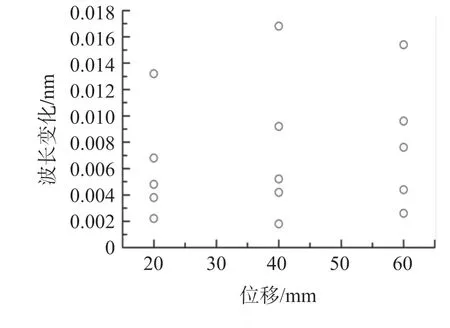
图7 不同位移时的波长变化差异值
4 压缩试验研究
4.1 试验方法
在室内恒温条件下,对FBG 环向应变传感器进行了单轴压缩试验。 图8 显示了实验室中单轴压缩试验的实验设计。 单轴压缩实验由测试控制端、FBG 数据采集端(数据采集机的频率为25 Hz)、加载平台、PU(Polyurethane)圆柱和FBG 环向应变传感器组成,其中PU 圆柱材料有弹性高、压缩永久变形率低的优点,PU 圆柱位于两个加载板的中心,FBG 环向应变传感器位于PU 圆柱上。 在PU 圆柱上 表 面 逐 渐 施 加100 kPa、 150 kPa、 200 kPa、250 kPa、300 kPa、350 kPa 和400 kPa 7 种不同的垂直压力进行单轴压缩试验,每组单轴压缩试验完成10 次加载循环。
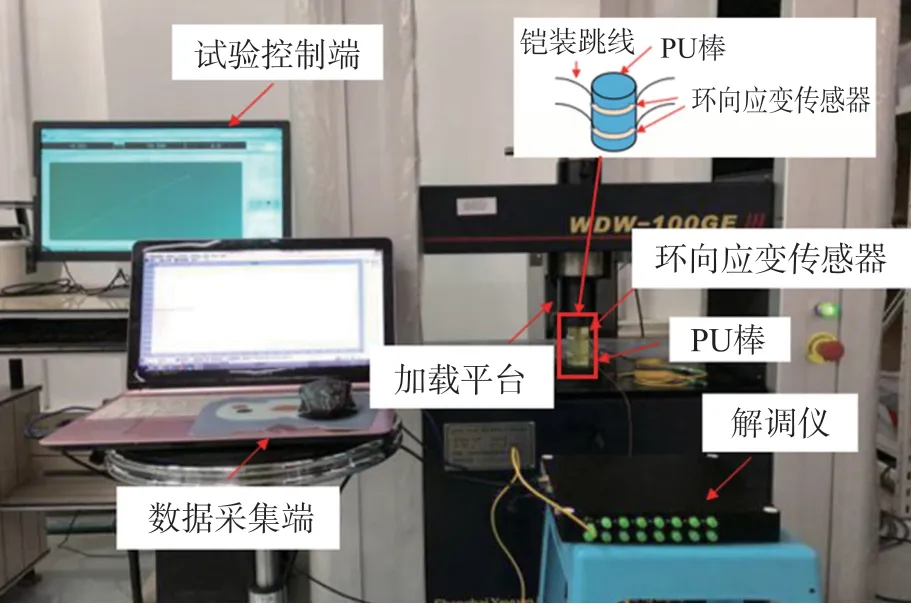
图8 单轴压缩试验测试
4.2 分析与讨论
图9 显示了在压力作用下,FBG 环向应变传感器波长与受压时间的关系。 在多次循环单轴压缩试验中,FBG 传感器的波长随时间呈周期性变化。 在100 kPa、150 kPa、200 kPa、250 kPa、300 kPa、350 kPa和400 kPa 7 种不同压力作用下,各试验波长周期变化的范围都非常稳定。 在相同的加载周期下,光纤光栅传感器的波长范围保持稳定,表明该FBG 环形应变传感器的测量性能比较稳定。
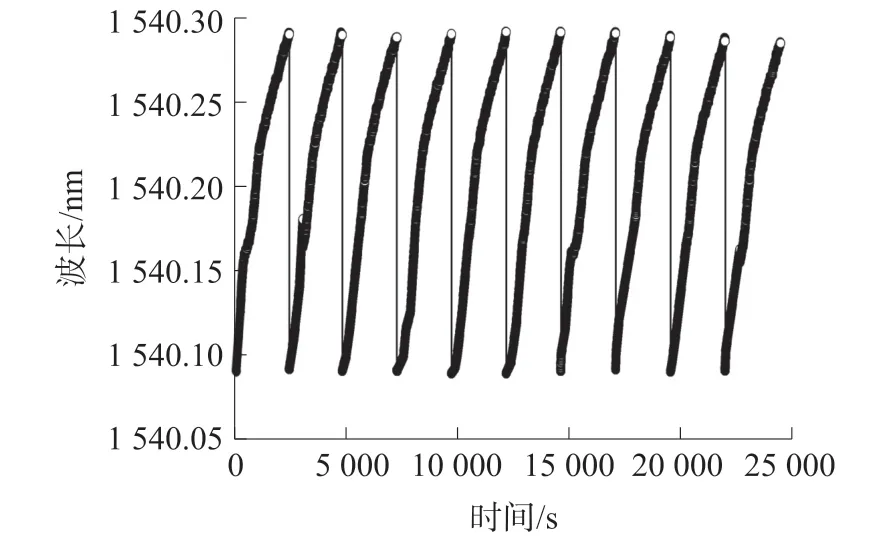
图9 受压状态下FBG 传感器波长与时间的关系
图10 为FBG 传感器波长差值与不同应力之间的关系。 随着压强的增大,FBG 环向应变的波长变化量也在不断地增大,且两组数据之间的线性相关度较好,相关系数为0.97。 每增加1 kPa 的压力,环向应变传感器的波长也相应增加0.0003 nm,所以该FBG 环向应变传感器的灵敏度达到0.3 pm/kPa。
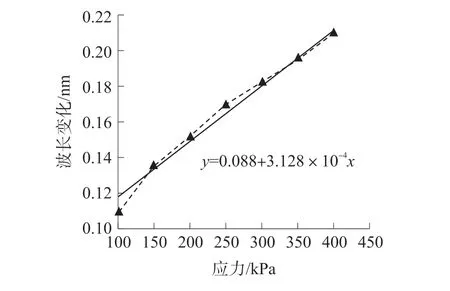
图10 FBG 传感器波长变化与应力的关系曲线
图11 为FBG 传感器分别在100 kPa、150 kPa、200 kPa、250 kPa、300 kPa、350 kPa 和400 kPa 的压力作用下环向应变传感器所受到的应力与应变之间的关系,应变数据使用10 组重复荷载试验所得数据的平均值。 从图11 所示结果可以得出:传感器所受应力与应变之间呈现正相关关系,线性相关度达到0.97。 两组数据所拟合的直线斜率比为3.73,说明当应力达到所测最大值400 kPa 时,该传感器还处于弹性变化范围内。
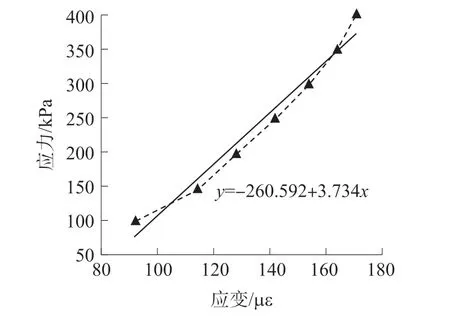
图11 应变与应力关系图
图12 为不同压力的单轴压缩试验中FBG 环向应变传感器的最大波长率。 在100 kPa、150 kPa、200 kPa、250 kPa、300 kPa、350 kPa 和400 kPa 的垂直压力下,最大波长差分别为0.011 nm、0.012 nm、0.006 nm、 0. 017 nm、 0. 010 nm、 0. 005 nm 和0.009 nm,最大相对误差分别为9.9%、8.7%、3.6%、9.9%、5.5%、2.7%和4.4%,相对误差均小于10%。在100 kPa 和250 kPa 压力下,最大波长差为0.017 nm,波长差最大相对误差为9.9%。
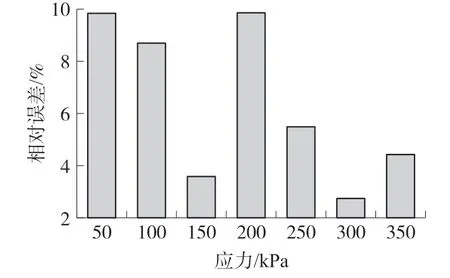
图12 不同应力下测量误差
5 结论
利用FDM 技术和FBG 传感器,设计并制作了一种传感器。 通过将光纤光栅传感器放置在PU 圆柱上进行单轴压缩试验,验证了FBG 环向应变传感器的性能。
①本研究将FBG 传感器与FDM 技术相结合,研制了一种FBG 环向应变传感器。 由于建模过程中温度和材料挤压的影响,FBG 的波长下降,产生了16 με 的收缩变形。
②标定试验表明,FBG 环向应变传感器的测量灵敏度为0.022 nm/mm,分辨率为0.114 mm,在拉伸循环试验中,传感器的波长差在0.017 nm 范围内,最大相对误差为3%。
③在单轴压缩试验中,通过7 组不同的纵向荷载压缩,经过10 次循环时各纵向力的波长峰值和最小值的一致性较高。 传感器的波长差小于0.01 nm,相对误差小于10%。 实验结果表明,FBG 位移传感器的灵敏度为0.3 pm/kPa,具有较好的测量性能。
虽然本研究中的传感器能够有效地监测出柱状物体的应变,但是并不一定是最有效的,未来可以通过3D 打印制造出更适合监测环状物体的结构,使得光纤传感器能够达到更优灵敏度与量程,可以通过使用其他3D 打印材料,延长传感器的使用寿命和提高抗腐蚀的能力。
猜你喜欢
理化检验(物理分册)(2022年10期)2022-11-22
船舶力学(2022年7期)2022-07-25
中国交通信息化(2022年5期)2022-07-23
土木工程与管理学报(2021年5期)2021-11-10
矿产勘查(2020年2期)2020-12-28
潍坊学院学报(2020年6期)2020-11-22
科技和产业(2020年7期)2020-07-24
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2019年24期)2019-02-23
北方交通(2016年12期)2017-01-15