
地铁车辆柔性车体半主动悬挂天棚模糊控制
2022-08-19 13:17孟建军胥如迅李德仓陈晓强
噪声与振动控制 2022年4期
孟建军,宋 浩,胥如迅,李德仓,陈晓强
(1.兰州交通大学 机电技术研究所,兰州 730070;2.甘肃省物流及运输装备信息化工程技术研究中心,兰州 730070;3.甘肃省物流及运输装备行业技术中心,兰州 730070)
快速发展的城市轨道交通促进了我国城市轨道车辆技术的进步。随着地铁车辆车体技术朝着轻量化的方向发展,车体会因为采用铝合金中空等轻量化材料而造成刚度降低,车体固有频率会发生改变,可能产生弹性共振,降低车辆运行平稳性。并且近年来新建的地铁线路运营时速也在不断提高,从而更容易导致地铁车辆车体产生弹性共振。因此在研究地铁车辆动力学特性时,不能忽视车体的柔性特征,并有必要针对地铁车辆开展半主动悬挂系统的研究,以满足乘客日益增长的对于地铁乘坐舒适性需求。
宫岛等[1]基于天棚阻尼对考虑弹性车体的高速列车进行了垂向振动控制研究。宋雨等[2]采用了参数自调整控制策略对列车进行了半主动控制。邓力等[3]针对传统的半主动控制算法应用到实际的阻尼器中所产生的响应滞后问题,引入了开闭环优化控制策略,并将仿真结果与实测对比,验证了该控制策略的有效性。郭孔辉等[4]将天棚及地棚阻尼控制策略结合,引入混合阻尼控制策略,并且通过仿真验证了其能够同时提高列车的平稳性及安全性。李广军等[5]对于车辆半主动悬挂系统提出了基于变论域的模糊控制策略。陈春俊等[6]研究了在考虑气动载荷作用下,列车半主动悬挂系统对于振动的控制效果。田向阳等[7]针对考虑车下吊挂与车体振动耦合的车辆动力学模型进行了半主动控制。肖乾等[8]在研究地铁车辆动力学特性时,考虑了车体弹性的影响。Crews 等[9]基于多目标遗传控制策略对车辆悬挂系统进行了半主动控制仿真,并得出该策略相比于其他常规半主动控制策略能够更有效改善乘坐舒适度并且控制车辆振动的结论。丁建明等[10]与周洪涛等[11]基于模糊控制策略对高速列车车体前后横向减振器进行了半主动控制,并且证明基于模糊控制的横向半主动悬挂能够有效衰减车体的横向振动。孟建军等[12]基于模糊复合控制策略进行了主动悬挂控制研究,研究结果表明模糊复合控制能够更有效改善列车运行平稳性。赵义伟等[13]提出了基于阻尼开关型与连续型混合控制策略,并通过UM 与Simulink的联合仿真验证了该混合控制策略能够综合阻尼开关型与连续性的优点,能够有效提高车辆的横向平稳性。许文天等[14]基于模糊天棚控制策略对高速动车组横向振动进行了半主动控制。
综上可知,在考虑地铁车辆车体柔性的情况下,对地铁车辆振动进行半主动控制的研究较少。因此,本文以某型地铁车辆为研究对象,采用基于天棚阻尼的模糊控制策略对车体振动进行半主动控制。联合运用有限元分析软件与多体系统动力学软件建立考虑车体柔性的地铁车辆刚柔耦合动力学模型,并且联合MATLAB 搭建半主动控制仿真平台进行仿真计算,分析在不同控制策略下动力学性能的差异,研究基于天棚阻尼的模糊控制的控制效果。
1 车辆刚柔耦合动力学建模及仿真
1.1 地铁车辆刚柔耦合建模理论
首先定义点p为绝对坐标系中柔性车体上的任一点的坐标,如式(1)所示:

式中:Px、Py、Pz为局部坐标系在整体坐标系里的3个坐标分量;α、β、γ为局部坐标系在绝对坐标系中的欧拉角;τi为模态振型,i为所选取的模态阶数;P、H为各坐标系中的矢量集;τ为模态振型的向量集。
如果将车体划分为j个单元,则动能如式(2)所示:

式中:ρj和Vj分别为单元体j的密度和体积,Mj为柔性体单元质量矩阵。
车体的动力学方程如式(3)所示:

将式(3)改写为:

式中:M、C和K分别为柔性车体的质量矩阵、阻尼矩阵和刚度矩阵;fg为重力;λ为约束方程T的拉格朗日乘子;R为广义力矩阵;FT为外力矩阵。
1.2 考虑车体柔性的车辆刚柔耦合动力学建模
以某型地铁车辆头车车体作为研究对象,对其结构中不影响整体模态的部分采取必要简化,建立车体三维模型,并导入HyperMesh 软件建立有限元模型,进行模态分析。模态振型取前13 阶,并略去前6阶刚体模态,模态频率和振型如表1所示。

表1 第7~第13阶模态频率和振型
将车体的模态分析结果导出为模态中性文件,并导入ADAMS/Rail软件,由于车体前6阶模态为刚体模态,因此在柔性车体子系统中不考虑前6 阶刚体模态。将柔性车体与转向架装配,建立车辆刚柔耦合动力学模型,如图1所示。

图1 车辆刚柔耦合动力学模型
1.3 仿真分析对比
搭建刚性车体地铁车辆模型并进行仿真,与地铁车辆刚柔耦合模型形成对比,并且在中车某试验线路上对该型地铁车辆进行测试,刚体车体地铁车辆模型如图2所示,车体前、中、后测点及测试场景如图3所示,其中后端测点在转向架中心上方横向1 m车体地板处。根据GB5599-1985,该测点是用于评价铁道车辆舒适性的加速度采集点。

图2 地铁车辆刚性车体动力学模型

图3 车体前、中、后测点及测试场景
仿真计算中,轨道不平顺采用德国高速谱,由于地铁车辆运行速度低于250 km/h,因此采用德国高速高干扰谱。实际测试及仿真时均模拟地铁车辆在相邻两地铁站之间的加减速全工况运行情况。其中,为简化不必要的工作量,在测试及仿真过程中缩短地铁车辆匀速运行时间,整个过程大约为40 s。地铁车辆运行速度曲线如图4所示。

图4 地铁车辆运行速度曲线
柔性车体模型、刚性车体模型以及实测的车体前端、中部及后部的横向振动加速度对比如图5所示。
由图5可知,柔性车体的振动加速度要明显大于刚性车体。当车辆处于前16 秒到26 秒的运行时段时,地铁车辆运行速度的大致范围为60 km/h~80 km/h,柔性车体的振动加速度与刚性车体的差值相比于低速运行时段显著增大,并且从整个运行过程来看,柔性车体的振动加速度更加贴近实测情况,验证了柔性车体地铁车辆刚柔耦合动力学模型的正确性以及相比于刚性车体模型在仿真计算准确性上的优势。

图5 车体不同位置横向振动加速度
2 半主动悬挂控制系统
2.1 基于天棚阻尼的模糊控制器设计
天棚阻尼(Skyhook damper)控制的概念由D.E.Karnopp 教授提出。天棚阻尼理论的控制原理如图6所示。
由图6可知,当车辆运行时,因为轨道不平顺等因素造成轮对产生横向位移激励xi(t),车体和构架会发生横向振动位移yc(t)及yt(t)。假定车辆在运行过程中,车体与一堵虚拟刚性墙之间存在阻尼减振器,阻尼力的输出与车体横向振动速度呈线性关系,目前已广泛使用的被动悬挂中的固定阻尼减振器能够起到抑制车体振动的作用,但是偶尔会产生减振器的阻尼力方向和车体振动方向一致的情况,此时反而会使得车体振动更加剧烈。当减振器处于这种情况下时,如果将阻尼调节为0,这样阻尼减振器就不会输出有害的阻尼力,从而能够在抑制车体振动时,只输出有利于控制车体振动的力,提高车体振动的控制效果。其理想控制律如式(5)所示:

图6 天棚阻尼原理

而理想天棚阻尼控制在实际列车运行中无法实现,阻尼力只能由车体和构架之间的减振器提供,因此,天棚阻尼控制在实际工程应用中,往往会将连续调节的规律简化为“开闭式”调节,其工程化的控制策略如式(6)所示。

由式(6)可知,开闭式的天棚阻尼控制只能输出两个阻尼值,即最大阻尼值和最小阻尼值,这样会造成减振器在开启与关闭之间频繁切换,阻尼值的突变,会使得振动系统发生颤振,无法产生良好的控制效果。因此,可以基于模糊控制的优点来克服天棚阻尼控制的弊端。

式中:(PA|PB|PC|PD|PE|PF|PG)是把减振器的阻尼输出值划分后得到的7个模糊子集。
模糊集合的关键构成之一是隶属度函数,其作用是确立把数值变量转换为模糊变量的规则。具体过程为对输入量进行划分,所划分的不同区间数值与语言变量进行一一对应。通常划分的区间越多,产生的控制效果越好,但若划分区间过多会增加控制模型的复杂程度,并且对于控制效果的提升并不明显,会产生一定的边际效应。因此,在综合考虑控制效果及控制效率的情况下,本文将输出变量即减振器阻尼划分为(PA|PB|PC|PD|PE|PF|PG)这7 个模糊子集。MATLAB 软件中含有5 种基本隶属函数。其中,依据不同种隶属度函数特点,对于两个变量输入选择高斯函数,这能够起到更加平稳的控制效果,而对于输出则采用三角形隶属度函数,这可使得输出更加迅速,符合振动控制的时效性。输出论域为[-3,3]。
模糊控制规则是借助语言变量确立输入变量及输出变量二者之间的关系,是模糊控制器的一个核心部分。本文参考以往应用于高速列车的模糊控制专家经验,并结合地铁车辆与高速列车的差异等因素,综合确立模糊控制规则,如表2所示。

表2 模糊控制规则表
依据确立的模糊控制规则产生的输入输出关系曲面如图7所示。

图7 模糊控制器输入输出关系曲面
通过上述过程,建立了基于天棚阻尼的模糊控制器,如图8所示。

图8 基于天棚阻尼的模糊控制器
2.2 磁流变阻尼器
根据基于天棚阻尼的模糊控制策略中所依据的条件可输出变阻尼,选择磁流变阻尼器作为作动器以实现车辆振动的半主动控制。磁流变阻尼器的工作原理主要基于磁流变效应,具有结构简单、响应快速及阻尼连续可调等特点,在半主动控制领域有着广泛应用。磁流变阻尼器模型如图9所示。
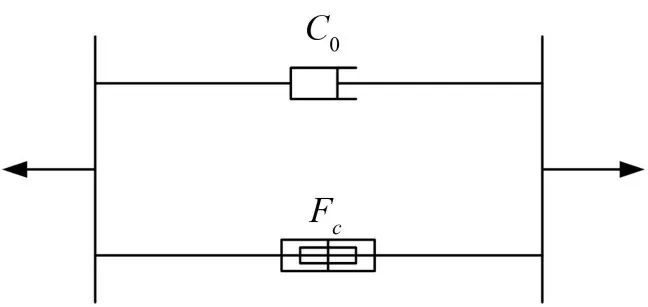
图9 磁流变阻尼器模型
磁流变阻尼器库仑阻尼力如式(8)所示:

式中:Fm为最大屈服力,β为指系数(β>0),v为磁流变阻尼器两端相对速度差,C0为黏滞阻尼系数。
磁流变阻尼器用于提供二系悬挂横向阻尼,磁流变阻尼器两端分别为车体与转向架构架,其配置及方向如图10所示。

图10 二系悬挂横向磁流变阻尼减振器
3 搭建半主动联合仿真模型
本文使用4个独立的模糊控制器对地铁车辆车体振动进行控制,输入量分别为前转向架左侧、前转向架右侧、后转向架左侧及后转向架右侧横向减振器两端速度差以及前转向架左侧、前转向架右侧、后转向架左侧及后转向架右侧的车体速度。经过基于天棚阻尼的模糊复合控制运算后,输出横向减振器的阻尼值,进而达到了对地铁车辆车体振动半主动控制的目的。
将ADAMS/Rail 中的模型导入到MATLAB,基于图8中的天棚阻尼模糊控制器,搭建基于天棚阻尼的模糊复合控制的地铁车辆半主动控制联合仿真模型,如图11所示。

图11 基于天棚阻尼的模糊车辆半主动控制模型
4 仿真结果分析
4.1 不同半主动控制策略对车体振动响应的控制效果对比
分别对采用被动控制、经典天棚阻尼控制以及基于天棚阻尼的模糊控制的地铁车辆模型进行仿真计算。由于在模型中是对二系横向阻尼减振器进行半主动控制仿真,所以主要计算地铁车辆车体前端、中部及后部横向振动加速度,3种控制策略下的车体不同位置的振动加速度如图12所示。
由图12可知,相比于被动控制,采用天棚阻尼控制以及基于天棚阻尼的模糊控制能够有效抑制车体不同位置的振动加速度,并且基于天棚阻尼的模糊控制相对于经典的天棚阻尼控制能够取得更优的控制效果,基于2种策略的控制效果改善情况如表3及表4所示。
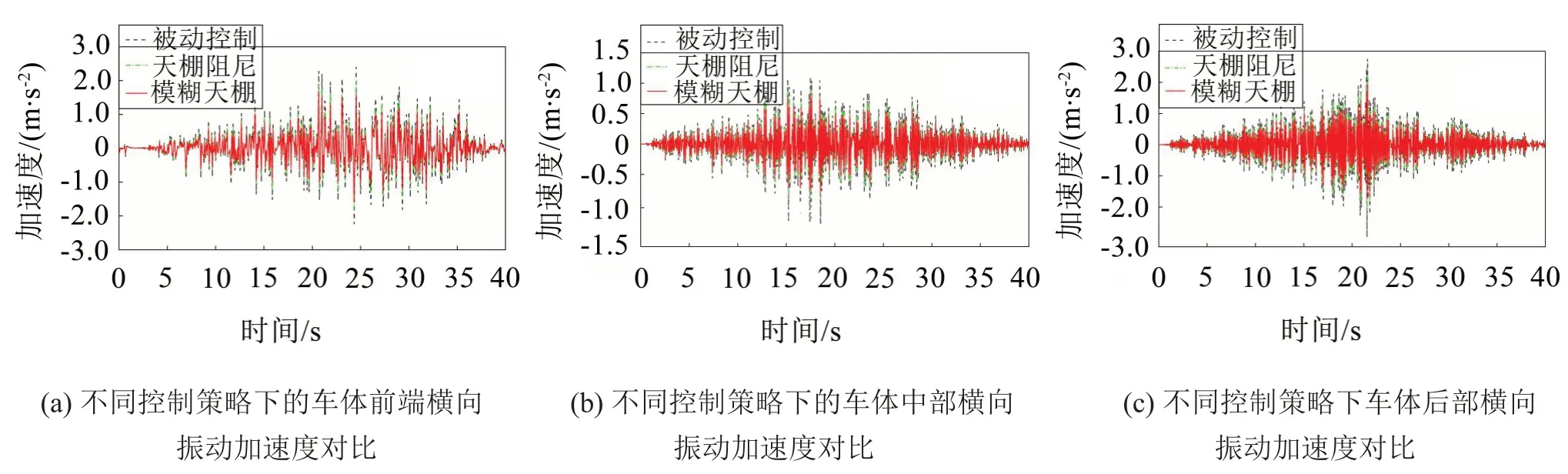
图12 不同控制策略下车体不同部位横向振动加速度对比
由表3及表4可知,当采用天棚阻尼控制策略后,地铁车辆车体前端、中部及后部的横向振动加速度分别减少了17.4%、23.8%及14.3%,而采用模糊天棚控制策略后,车体前端、中部及后部的横向振动加速度分别减少了30.2%、28.3%及22.9%,显然,采用基于天棚阻尼的模糊复合控制能够达到更加良好的减振效果。

表3 天棚阻尼控制效果

表4 模糊天棚控制效果
4.2 不同半主动控制策略对车体振动响应功率谱密度的影响对比
为了更加深入研究不同控制策略对地铁车辆车体振动控制效果的差异,需要对地铁车辆横向振动响应进行频响分析,所得不同控制策略下车体不同位置横向振动加速度功率谱密度PSD(Power Spectral Density)对比由图13所示。

图13 不同控制策略下车体不同位置横向振动加速度PSD
由图13可知,采用天棚阻尼及基于天棚阻尼的模糊半主动控制后,车体不同位置的横向振动加速度PSD 均有所下降,半主动控制能够有效地抑制车体的振动,并且基于天棚阻尼的模糊控制效果要优于经典的天棚阻尼控制。
4.3 车辆动力学性能改善情况对比
采用Sperling 平稳性指标以及加速度均方值RMS(Root Mean Square)作为车辆动力学性能评价指标。线路不平顺条件采用德国高速高干扰谱,以此作为轨道激励。
根据GB5599-1985,在车体后端位置所选取的测点是用于评价铁道车辆舒适性的加速度采集点。因此,根据车体后端测点振动响应计算实际测试下的车辆平稳性指标,并且与半主动控制后的车辆动力学性能进行对比,不同半主动控制策略下的车辆动力学性能的改善情况如表5所示。

表5 被动控制与半主动控制车辆动力学性能比较
由表5可知,实际测试与被动控制下的车辆动力学性能比较接近,而采用天棚阻尼及基于天棚阻尼的模糊半主动控制后,车辆横向平稳性指标均有所改善,在天棚阻尼控制下,车体横向振动加速度RMS 值由0.134 1 下降到0.118 6,减少了11.6%,车辆横向平稳性Sperling 指标由1.548 5 下降到1.417 3,减少了8.4%,而在模糊天棚控制下,车体横向振动加速度RMS 值下降到了0.107 7,减少了19.7 %,车辆横向平稳性Sperling 指标下降到了1.349 2,减少了12.9%。总之,使用了基于天棚阻尼的模糊复合控制策略后,地铁车辆的横向平稳性得到了更大程度的改善。
5 结语
本文以某型地铁车辆为研究对象,建立考虑柔性车体的地铁车辆刚柔耦合动力学模型,采用基于天棚阻尼的模糊控制策略联合MATLAB 搭建半主动控制仿真平台进行了仿真计算,可得出如下结论:
(1)在模拟地铁车辆实际运行工况条件下,通过与实测振动数据的比较可知,考虑柔性车体的车辆刚柔动力学模型的车体振动加速度相比于刚性车体更加接近实际情况,充分验证了在地铁车辆振动特性的仿真计算中将车体考虑成柔性体的必要性。
(2)基于天棚阻尼的模糊控制的减振效果要优于传统的天棚模糊控制,能够在一定程度上克服传统的天棚模糊控制容易产生“颤振”弊端,能够起到更加良好的减振效果。
(3)通过频响分析计算振动加速度的功率谱密度,可知采用基于天棚阻尼进行模糊控制的半主动悬挂能够更有效地降低地铁车辆车体振动加速度的功率谱密度,即能够更有效地衰减传递到车体上的振动,从而能够一定程度上抑制车体的弹性振动,并且通过地铁车辆动力学性能指标的计算可得,采用基于天棚阻尼的模糊半主动控制后,地铁车辆横向平稳性指标得到更大程度的改善。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
民间故事选刊(2022年12期)2022-10-30
广西科技大学学报(2021年1期)2021-03-15
装饰装修天地(2020年10期)2020-07-04
科学与财富(2017年12期)2017-05-16
汽车技术(2017年4期)2017-04-26
汽车工程学报(2015年6期)2016-03-23
专用汽车(2016年12期)2016-02-11
汽车工程(2015年8期)2015-04-12
山东工业技术(2014年20期)2014-10-21
